Escolar Documentos
Profissional Documentos
Cultura Documentos
Mecatronica Facil 01
Mecatronica Facil 01
Enviado por
dgbezerra0 notas0% acharam este documento útil (0 voto)
9 visualizações30 páginasDireitos autorais
© © All Rights Reserved
Formatos disponíveis
PDF, TXT ou leia online no Scribd
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF, TXT ou leia online no Scribd
0 notas0% acharam este documento útil (0 voto)
9 visualizações30 páginasMecatronica Facil 01
Mecatronica Facil 01
Enviado por
dgbezerraDireitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF, TXT ou leia online no Scribd
Você está na página 1de 30
PROJETO
Octa-I um rob capaz de desviar de obstculos.
Ao se deparar com um, ele pra, d um giro de 45 e
segue em frente, at encontrar um novo obstculo.
Isto permite que ele possa, por exemplo, sair de um
labirinto. O melhor de tudo isto que ele um rob
que voc mesmo pode construir.
A Mecatrnica um campo do conhecimento
humano que tende a crescer muito nos prximos
anos. possvel constatar nos dias de hoje, por
exemplo, o nvel de automao nas indstrias que
cada vez mais utilizam robs na linha de produo
de seus produtos. Estes robs no se parecem com
os que vemos nos filmes de fico cientfica onde,
normalmente, se movimentam e, invariavelmente,
acabam por querer dominar o mundo. Se este tipo
de coisa acontecer ou no ns no sabemos, mas
o que sabemos que se quisermos ter o controle
da situao e um bom emprego no futuro, deve-
mos comear desde j a aprender como um rob
funciona e como fazer para program-lo. Nos Es-
tados Unidos existem diversas competies de
robs e as escolas montam diversos times para
competir entre si e os melhores so mandados
para competies estaduais e nacionais. Infe-
lizmente aqui no Brasil ainda no temos nada
que se compare a isto, mas se no comearmos
logo, iremos ficando cada vez mais deslocados. O
Octa-I, o rob descrito neste artigo, poderia servir
de base para uma competio semelhante ao que
vemos l.
Este artigo permitir construir um rob com as se-
guintes caractersticas:
OCT OCT
OCT OCT OCTA-I A-I
A-I A-I A-I O ROB QUE O ROB QUE
O ROB QUE O ROB QUE O ROB QUE
DESVIA DE OBSTCULOS DESVIA DE OBSTCULOS
DESVIA DE OBSTCULOS DESVIA DE OBSTCULOS DESVIA DE OBSTCULOS
Octavio Nogueira
Tato Equipamentos Eletrnicos
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001 4
PROJETO
Sistema motriz: Dois servo motores com veloci-
dade varivel e inverso do sentido de giro.
Sensor: O sonar, permite determinar a distncia
que o rob est de um objeto. Com este sensor o
rob pode se movimentar desviando de obstculos.
Microcontrolador: a parte principal do rob pois
onde as informaes dos sensores sero avalia-
das e onde sero tomadas as decises.
Alimentao: Fornece energia para o rob se mo-
vimentar.
A seguir sero explicados com mais detalhes os
itens acima:
SISTEMA MOTRIZ
O Octa-I possui dois servos motores. Eles se di-
ferenciam dos motores normais pois permitem que a
velocidade seja variada atravs do tamanho dos pul-
sos que so enviados.
Eles possuem trs terminais sendo eles; terra, ali-
mentao de 5 V e controle. O sinal de controle um
trem de pulsos com durao entre 1 ms e 2 ms e um
perodo de 10 ms, ou seja, pulsos de 1 ms a 2 ms com
um intervalo entre eles de 10 ms. Quando o pulso tem
1,5 ms o motor est parado, quando tem 1 ms o motor
gira a velocidade mxima em um sentido e quando est
em 2 ms, gira a velocidade mxima no outro sentido.
Ns no precisamos enviar pulsos de 1 ms e 2 ms.
Quaisquer valores entre estes limites faro o motor
se mover, por exemplo se quisermos fazer o rob se
mover lentamente para frente, poderamos enviar
pulsos de 1,6 ms e se quisermos que o rob vire,
mandamos pulsos de 1,6 ms para um motor e 1,4 ms
para o outro. Com estas duraes de pulsos, um motor
vai se mover lentamente para frente e o outro lenta-
mente para trs.
Um aspecto importante a lembrar que o motor
precisa receber um pulso a cada 10 ms para conti-
nuar se movimentando, se pararmos de mandar pul-
sos ele pra.
SENSOR
O sonar um dos sensores mais interessantes,
pois faz com que o rob saiba a distncia que est
de um objeto, permitindo com isto que ele desvie e
no colida com o mesmo.
Figura 1 - Representao e aspecto dos servo-motores.
Figura 2 - Pulsos de controle dos servo-motores.
O funcionamento do sonar o seguinte: ele envia
um pulso ultra-snico muito curto e fica esperando o
seu retorno. O pulso vai viajar a uma velocidade aproxi-
mada de 340 m/s, bater em um obstculo e retornar.
Assim que retornar, o mdulo do sonar calcula o tempo
que o pulso levou para ir e voltar. Como sabemos a
velocidade do pulso e o tempo que ele levou para
ir e voltar, possvel calcular a distncia que ele
percorreu.
A diferena deste sensor para os outros que de-
tectam obstculos, como os pticos, que o sonar
nos permite saber a distncia exata do obstculo.
Imagine que o seu rob est participando de uma
competio onde ele tem que sair de um labirinto, se
estivesse usando um sensor ptico ele teria que an-
dar at encontrar uma parede e ento ir seguindo a
parede at achar uma porta e seguir este processo
para caminhar pelo labirinto. Utilizando o sonar ele
poderia fazer um giro de 360 graus sobre o seu eixo,
fazendo medies de distncia a medida que girasse
e, aps isto, saberia em qual sentido deveria se mo-
ver para passar pela porta.
CREBRO OU PROCESSADOR CENTRAL
Um dos grandes problemas de quem quer come-
ar a aprender ou se aprofundar em Robtica ter
que aprender a linguagem de programao do rob.
Figura 3 - O sonar.
5 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROJETO
Hoje existem diversas linguagens, cada uma com
suas vantagens e desvantagens. Para este rob ns
escolhemos utilizar o microcontrolador BASIC Step
2K. Este um poderoso microcontrolador com 2048
bytes de memria flash que possui 15 entradas/sa-
das e pode ser programado em BASIC. O BASIC
uma linguagem muito fcil de se aprender e ao mes-
mo tempo poderosa. Esta linguagem possui todas as
caractersticas das linguagens de alto nvel como C
e Pascal, com a vantagem de ser muito mais fcil de
se aprender. A Microsoft fornecia a linguagem
QBASIC junto com o DOS, antes da introduo do
Windows e, provavelmente, grande parte dos leitores
j programou alguma vez em QBASIC. Pois bem, o
BASIC utilizado pelo BASIC Step 2K praticamente
idntico ao QBASIC.
Outros problemas com os microcontroladores so
a necessidade de um gravador, geralmente caro, e a
sua disponibilidade no mercado nacional. Pois bem,
o BASIC Step 2K de fabricao nacional e o seu
gravador um simples cabo ligado a porta paralela
do PC. O compilador onde escrevemos o cdigo fon-
te totalmente amigvel e integrado com o gravador,
nos permitindo fazer simulaes e emulao antes
de gravarmos o microcontrolador. Ele possui em sua
biblioteca diversas funes teis j prontas para uso
tais como: escrita em display LCD, comunicao
serial, I2C e 1WIRE. E o melhor, gratuito.
Todas as informaes sobre o microcontrolador
BASIC Step 2K, assim como o compilador para
download esto disponveis no site http://
www.tato.ind.br.
Gostaria ainda, de deixar claro que este artigo
apenas um ponto de partida para o que pode ser um
grande projeto, j que estamos estudando os concei-
tos bsicos de um rob motorizado. Os tpicos aqui
apresentados podem ser aplicados para outros tipos
de robs e este rob bsico pode ser ampliado com o
acrscimo de outros sensores e dispositivos.
COMPILADOR
O programa precisa ser escrito e compilado antes
de ser gravado no microcontrolador do rob, para isto
usamos o compilador Bascom. Ele um ambiente
compl eto de desenvol vi mento para os mi cro-
controladores BASIC Step 2K. Ele possui o editor
de texto, compilador, simulador, gravador e arqui-
vo de ajuda com todos os comandos explicados.
A figura 5 abaixo mostra a sua aparncia.
Figura 4 - O BASIC Step 2K.
Como dissemos anteriormente a linguagem utili-
zada o BASIC, uma linguagem muito fcil de se
aprender e com muitos recursos.
O Bascom especialmente indicado para o nos-
so rob pois j possui em suas bibliotecas, coman-
dos para controle dos motores, leitura dos sensores
de ultrasom, etc.
A primeira coisa a fazer em nosso programa con-
figurar os servos com o seguinte comando:
Config Servos = 2 , Servo1 = Portb.0 ,
Servo2 = Portb.1 , Reload = 50
Este comando diz ao compilador que teremos 2
servos ligados as sadas Pb0 e Pb1. Para fazermos
os motores se moverem basta executarmos o seguin-
te comando: Servo(1) = 20 ou Servo(2) = 20.
Para facilitar o nosso trabalho, podemos escrever
algumas rotinas para automatizar este processo:
Rotina para fazer os motores pararem:
Sub Para()
Servo(1) = 30
Servo(2) = 30
End Sub
Faz o rob se mover para frente com velocidade
determinada por v:
Figura 5 - Tela do Bascom.
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001 6
PROJETO
Sub Frente(v As Byte)
Servo(1) = 30 - V
Servo(2) = 30 + V
End Sub
Faz o rob se mover para trs:
Sub Re(v As Byte)
Servo(1) = 30 + V
Servo(2) = 30 - V
End Sub
Faz o rob virar para a direita:
Sub Direita(v As Byte)
Servo(1) = 30 - V
Servo(2) = 30 - V
End Sub
E para a esquerda:
Sub Esquerda(v As Byte)
Servo(1) = 30 + V
Servo(2) = 30 + V
End Sub
Estas rotinas so chamadas pelo programa prin-
cipal a medida do necessrio, um exemplo de progra-
ma simples para o rob mover-se para a frente por 2
segundos, parar, virar-se para a direita e mover-se
por mais 2 segundos. O programa ficaria assim:
Call Frente(5)
Wait 2
Call Para()
Call direita(3)
Wait 1
Call Para()
Call Frente(5)
Wait 2
Call Para()
Como pode ser visto por este pequeno programa
exemplo, a linguagem bem simples e com a ajuda
de sub-rotinas podemos programar o rob em uma
linguagem quase coloquial.
MONTAGEM
Para a montagem deste rob voc vai precisar de:
1 microcontrolador BASIC Step 2K;
2 servo-motores modificados para rotao cont-
nua com pneus;
1 mdulo sonar;
1 capacitor eletroltico de 100 mF x 16 V;
1 suporte para 4 pilhas pequenas;
1 base de montagem;
1 diodo 1N4004 ou 1N4007;
fios de ligao.
Pinagem do BASIC Step 2K
Como a par te principal do rob o seu
microcontrolador de controle, iremos descrever a
pinagem do mesmo, veja que nem todos os pinos
sero usados neste rob. O BASIC Step 2K muito
potente com diversos perifricos tais como: comuni-
cao serial RS-232, etc, e diversos destes perifri-
cos no sero usados neste projeto. A pinagem do
Basic Step 2K mostrada na tabela 1.
Como podemos ver temos disponvel 15 linhas de
Tabela 1 - Pinagem do BASIC Step 2K.
entrada/sada nossa disposio, neste rob usare-
mos 2 sadas para os motores e 1 entrada para o
sonar.
O esquema eltrico, com suas respectivas liga-
es, esto representadas na figura 7. Os principais
passos a serem seguidos so:
1 ligue o fio de controle do motor direito ao pino
20 (PB
0
) e o fio de controle do motor esquerdo ao
pino 19 (PB
1
);
2 ligue os fios de alimentao e terra dos dois
motores ao suporte de pilhas tomando o cuidado para
no inverter a polaridade;
3 O sonar precisa de 3 ligaes, ligue o fio + 5 V
7 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROJETO
ao pino 5 do BASIC Step 2K, o fio G ao terra e o fio
de sada ao pino 18 (PB
2
) do BASIC Step 2K;
4 Ligue o terra do suporte de pilhas ao terra do
BASIC Step 2K (pino2);
5 Ligue o terminal positivo do suporte de pi-
lhas ao anodo do diodo e o catodo do mesmo
chave liga/desliga e desta para o pino 5 do BASIC
Step.
Com isto terminamos as ligaes eltricas e ago-
ra nosso rob precisa de um programa para executar.
A programao, como vimos anteriormente, feita
atravs compilador Bascom.
Figura 7 - Esquema eltrico da montagem.
Figura 6 - Montagem da placa-suporte do BASIC Step 2K.
Aps o programa ter sido compilado sem erros,
conectamos o cabo de gravao e transferimos o pro-
grama para o microcontrolador.
O site da Tato Equipamentos Eletrnicos http://
www.tato.ind.br, onde voc pode adquirir todos os com-
ponentes necessrios para a montagem eltrica do
seu rob bem como o compilador e programas de
exemplo para testar o seu rob.
O cdigo-fonte completo do programa elaborado
para o Octa-I est disponvel para download no site:
http://www.mecatronicaatual.com.br.
Figura 8 - Montagem das placas no chassi do rob.
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001 8
PROJETO
O nosso prottipo foi construdo em um chassi de
dois nveis; inferior com os dois redutores e a roda
livre e; superior com os circuitos eletrnicos e a cai-
xa de pilhas.
Os materiais utilizados foram chapa de plstico
estireno de 2 mm e chapa de acrlico transparente de
2 mm. A escolha de um chassi com essa configura-
o se deu com o intuito de obter uma melhor distri-
buio de peso sobre uma base de trs apoios (as
duas rodas motrizes dos redutores e a roda livre).
Distribumos as rodas de modo a formar com elas
um tringulo quase eqiltero, isso facilita a mobili-
dade do rob e, os circuitos na parte elevada ficam
com o acesso mais fcil alm de se conseguir uma
A ESTRUTURA DE PLSTICO DO A ESTRUTURA DE PLSTICO DO A ESTRUTURA DE PLSTICO DO A ESTRUTURA DE PLSTICO DO A ESTRUTURA DE PLSTICO DO OCT OCT OCT OCT OCTA-I A-I A-I A-I A-I
Jos Francci Jnior
Plastimodelista
melhor leitura dos sensores com uma maior distn-
cia deles em relao ao solo.
Com base nessas informaes use sua
criatividade, voc poder usar muitos materiais dife-
rentes para a construo do chassi tais como: cha-
pas metlicas diversas, eucatex, madeira compen-
sada fina, etc...No site http://www.mecatronica
atual.com.br voc encontrar alguns desenhos com
as principais medidas do chassi do Octa-I, para aju-
dar na elaborao do seu prprio modelo.
Tenha sempre em mente uma construo com-
pacta e firme, d especial ateno ao alinhamento do
sistema motriz e proteja os circuitos do p com uma
tampa ou cobertura, bom trabalho e divirta-se!
Figura 9 - Montagem da roda no servo-motor.
Figura 10 - Vista superior traseira do Octa-I, onde se pode
perceber os detalhes da "roda boba" e da chave liga/desliga.
Figura 11 - Mais alguns detalhes da montagem do chassi do Octa-I.
9 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001 9
ELETRNICA BSICA ELETRNICA BSICA
ELETRNICA BSICA ELETRNICA BSICA ELETRNICA BSICA
P P
P PPARA MECA ARA MECA
ARA MECA ARA MECA ARA MECATRNICA TRNICA
TRNICA TRNICA TRNICA
1 Par 1 Par 1 Par 1 Par 1 Par te te te te te
Newton C. Braga
INTRODUO
H alguns anos atrs, para insta-
lar uma mquina automatizada numa
indstria era preciso contar com a aju-
da de trs profissionais.
Um Engenheiro Mecnico, even-
tualmente com especializao em
pneumtica, para colocar a mquina
em seu lugar de funcionamento fa-
zendo as conexes e montagens de
todas suas partes; um Engenheiro
Eletrnico para instalar os dispositivos
de controle e finalmente um especia-
lista em software para elaborar os pro-
gramas de controle desta mquina.
As coisas mudaram e hoje em dia
para a mesma tarefa e tambm para
a prpria manuteno desta mquina
preciso apenas um profissional: o
especialista em Mecatrnica.
Mecatrnica a unio da eletrni-
ca com a mecnica criando automa-
tismos, robs, equipamentos de uso
industrial e domstico, veculos e che-
gando a um dos ramos mais fascinan-
tes da tecnologia que construo
de dispositivos dotados de intelign-
cia artificial.
No entanto, o conhecimento de
Eletrnica necessrio para os que pre-
tendem se tornar profissionais desta
cincia nem sempre pode ser adqui-
rido com facilidade por publicaes
comuns ou mesmo adquiridos em
cursos regulares.
De fato, nos tempos antigos a
Eletrnica era vista como uma ci-
ncia definitiva, que era estudada
para se trabalhar nela. E, neste
ponto as coisas tambm mudaram
em nossos dias: a Eletrnica uma
matria a ser estudada para se apli-
car em outras cincias como a
Informtica, as Telecomunicaes e
evidentemente a Mecatrnica.
Com estas mudanas preciso
adequar a Eletrnica aplicao e
isso vlido no nosso caso.
A finalidade aqui justamente
possibilitar a leitores de todos os n-
veis que desejam de alguma forma
entrar no campo fascinante da
Mecatrnica entender a Eletrnica
bsica usada em seus dispositivos.
Nossa abordagem justamente
ser dada de uma forma que os
fundamentos aqui ensinados pode-
ro servir de base para cursos
tcnicos, disciplinas eletivas de
cursos de segundo grau e at
mesmo para o aquele que
nunca teve contato
com a Mecatrnica
e deseja construir
seus prprios
dispositivos
mecatrnicos.
Analisaremos o princpio de fun-
cionamento de componentes e circui-
tos que podem ser usados nos pro-
jetos de Mecatrnica de todos os n-
veis, tanto os que podem ser elabo-
rados com finalidades didticas e re-
creativas at os que so encontra-
dos em aplicaes industriais.
Veremos todos os tipos de apli-
caes prticas incluindo sensores,
circuitos especficos, o uso do com-
putador e de microprocessadores e
os softwares que podem ser empre-
gados tanto em controle como
sensoriamento.
MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
10
Lembramos aos leitores que nos-
sa experincia vem do fato de tambm
termos elaborado o primeiro Curso de
Eletrnica numa revista tcnica h
25 anos utilizando na poca o mto-
do de Instruo Programada, e que
foi acompanhado por milhares de lei-
tores, muitos dos quais o utilizaram
como ponto de partida para uma vida
profissional de sucesso.
Tambm elaboramos um Curso de
Manuteno Eletrnica, de Rdio, TV
e Vdeo e de Instrumentao na mes-
ma revista, que nos d a necessria
habilitao para empreitar mais esta
tarefa que certamente tambm far
sucesso entre os leitores desta nova
revista.
OS COMPONENTES
ELETRNICOS
Comearemos o nosso curso com
a anlise dos componentes eletrni-
cos usados nos projetos de Meca-
trnica. Diferentemente do que mui-
tos leitores possam pensar, os com-
ponentes eletrnicos bsicos so
todos iguais. O modo como eles so
usados e as configuraes que
determinam o que o circuito ou o
conjunto vai fazer.
Assim, os mesmos componentes
usados num rob podem ser encon-
trados num televisor ou no sistema de
ignio eletrnica de seu carro.
Podemos dividir os componentes
eletrnicos em trs categorias que
sero o assunto desta nossa lio:
a) Componentes passivos
Os componentes passivos so
aqueles que no amplificam nem ge-
ram sinais sendo basicamente usados
na funo de polarizao, acoplamento
ou desacoplamento de circuitos.
Nos projetos de Mecatrnica os
principais componentes passivos que
vamos encontrar so:
Resistores
Os resistores tem por finalidade
apresentar uma resistncia eltrica ou
seja, uma oposio passagem de
uma corrente. A medida da resistn-
cia feita numa unidade denominada
ohms (W). Os resistores mais co-
muns so os de carbono e os de fio
de nicromo ou simplesmente de fio
e que tem os aspectos mostrados na
figura 3.
Outro ponto importante de nosso
curso a abordagem de tpicos mui-
to prticos que incluem a montagem
de alguns projetos experimentais e di-
dticos que na sua maioria podem ser
elaborados com materiais reciclados
ou de fcil obteno, inclusive os ele-
trnicos.
Nossa finalidade com tudo isso
ser:
a) Possibilitar aos leitores que pre-
tendem estudar Mecatrnica num
grau mais profundo ter os fundamen-
tos necessrios para o melhor enten-
dimento de sua Eletrnica em espe-
cial os que tiveram uma formao na
Mecnica e por isso pouco viram da
Eletrnica.
b) Dar elementos para cursos de
nvel mdio e mesmo superior para
criar experimentos e aulas para seus
cursos usando material prtico de f-
cil obteno e circuitos experimentais
bastante didticos. At mesmo cursos
completos podem ser elaborados com
base no material deste curso.
c) Dar idias prticas e fundamen-
tos tericos para que muitos dos lei-
tores que j possuam habilidades no
setor ou mesmo professores que pre-
tendam implementar as partes prti-
cas de seus cursos, possam elabo-
rar seus prprios projetos.
d) Dar elementos e idias para que
estudantes de todos os nveis pos-
sam elaborar projetos prticos como
base de trabalhos, para feiras e de-
monstraes ou mesmo para forma-
turas.
e) Reciclar os conhecimentos da-
queles que j esto no campo da
Mecatrnica mas que, por qualquer
motivo tenham passado por uma for-
mao incompleta no campo da Ele-
trnica, principalmente os que sairam
das escolas h mais tempo e que por-
tanto carecem de informaes so-
bre componentes e tecnol ogi as
mais modernas.
f) Levar ao leitor uma imagem atu-
al das Aplicaes da Mecatrnica no
dia-a-dia, indo das aplicaes recre-
ativas e didticas at as de uso em
aplicativos de consumo e industrial.
Enfim, nossa meta fornecer aos
leitores o primeiro curso fasciculado de
Mecatrnica que j foi dado em qual-
quer publicao tcnica de nosso pas.
Figura 1 - Resistores fixos comuns.
O tamanho do resistor est rela-
cionado com sua capacidade de dis-
sipar calor. Quanto mais intensa for
a corrente num resistor mais calor ele
gera e este calor precisa ser transferi-
do ao meio ambiente. Os resistores
comuns podem ser encontrados com
valores de resistncia desde frao
de ohm at mais de 20 milhes de
ohms e com dissipaes de 1/8 W a
mais de 100 W.
Para expressar os valores altos de
resistncia costume usar os prefi-
xos quilo (k) para milhares e mega (M)
para milhes. Assim, 2,2 k ohms sig-
nifica 2 200 ohms e 15 M ohms signi-
fica 15 000 000 ohms.
Para os leitores que vo usar
resistores importante conhecer o
cdigo de cores. As faixas coloridas
em torno do resistor do seu valor
conforme mostra a tabela 1.
Para ler, o primeiro e segundo
anis a partir da ponta do os dois
dgitos da resistncia enquanto que o
terceiro o fator de multiplicao ou
nmero de zeros.
Um resistor vermelho-violeta-
amarelo ter 2 7 seguidos de 0000 ou
270 000 ohms (270KW).
Existem resistores especiais que
podem ter sua resistncia alterada e
por isso so usados em ajustes ou
controles. Temos dois tipos principais
de resistores variveis que so mos-
trados na figura 4.
11 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
Os trimpots so usados para se
ajustar a resistncia de um circuito gi-
rando-se um cursor sobre uma pea
de grafite e os potencimetros so
usados como controles. Estes dois
componentes so especificados pela
sua resistncia mxima. Assim, um
trimpot ou um potencimetro de 100k
ohms um componente que pode ter
sua resistncia ajustada para apresen-
tar qualquer valor entre 0 e 100 000
ohms.
Existem potencimetros especi-
ais duplos e alguns at podem in-
cluir uma chave para ligar e desligar
um circuito.
Tambm podemos citar resis-
tores especiais que podem funcio-
nar como sensores e de que falare-
mos oportunamente.
Capacitores
A finalidade do capacitor arma-
zenar uma carga eltrica. Neste pro-
cesso o capacitor apresenta algumas
propriedades importantes que so
aproveitadas em circuitos eletrnicos.
Os capacitores so usados como fil-
tros, como espcie de reservatrio de
energia ou como amortecedores evi-
tando que ocorram variaes gran-
des de corrente num circuito.
Os capacitores so especificados
pela sua capacitncia (ou capacida-
de) que medida em farads (F). O
farad uma unidade muito grande
assim encontramos na maioria dos
casos especificaes em submltiplos
como o microfarad (mF) que equivale
milionsima par te do farad ou
0,000 001 F; o nanofarad (nF) que
equivale bilionsima parte do Farad
ou 0,000 000 001 F e o picofarad (pF)
que equivale a trilionsima parte do
Farad ou 0,000 000 000 001 F.
Os capacitores so formados por
duas placas de metal tendo entre elas
um material isolante (dieltrico) que
lhes d nome. Na figura 5 temos al-
guns tipos de capacitores normalmen-
te encontrados nos circuitos de
mecatrnica.
Os tipos mais comuns so os
cermicos, polister e eletrolticos. Os
eletrolticos so polarizados, ou seja,
preciso observar o plo positivo e
negativo no momento do uso.
Uma outra especificao dos
capacitores a tenso mxima que
podem suportar ou tenso de traba-
lho que medida em volts e que varia
entre 3 V e 1200 V tipicamente.
Indutores
Os indutores ou bobinas so com-
ponentes formados por espiras de fio
esmaltado que podem ser enroladas
numa forma sem ncleo, com ncleo
de ferro ou ferrite e que tem smbolo e
aspectos mostrados na figura 6.
Os indutores podem ser especifi-
cados pela indutncia em Henry (e
seus submltiplos como o microhenry)
ou ainda pelo nmero de espiras, di-
metro e comprimento da forma alm
do tipo de ncleo. Alguns indutores
possuem ncleos ajustveis para se
poder modificar sua indutncia.
Tabela 1 - Cdigo de cores para resistores.
Figura 2 - Resistores variveis.
Figura 3 - Capacitores: smbolos e aspectos. Figura 4 - Indutores.
MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
12
Transformadores
Os transformadores so compo-
nentes formados por duas bobinas ou
enrolamentos num ncleo ou forma
comum. O ncleo pode ser de lmi-
nas de ferro ou ferrite. O smbolo e
aspecto destes componentes mos-
trado na figura 7.
Os transformadores so usados
para alterar as caracterstica de um
sinal ou ainda uma tenso alternada.
O tipo mais usado de transformador
o denominado transformador de ali-
mentao ou transformador de for-
a. Este tipo de transformador usa-
do em fontes de alimentaes tanto
para reduzir a tenso da rede de ener-
gia para um valor menor de acordo
com a aplicao, como para isolar a
rede de energia evitando assim cho-
ques em quem tocar no circuito do
aparelho.
Os transformadores so especifi-
cados pela tenso de entrada (prim-
rio), tenso de sada e corrente de
sada (secundrio).
Alm desses podemos citar os
sensores, que podem ser construdos
com lminas e contatos, que falare-
mos quando entrarmos nos circuitos
que os utilizam.
b) Componentes ativos
Os componentes ativos so aque-
les que podem gerar ou amplificar si-
nais, os quais dividimos em dois gru-
pos principais. O primeiro, mais anti-
go e no muito usado atualmente a
no ser em aplicaes especiais so
os que trabalham com base em tubos
de gs ou vcuo, ou seja, vlvulas e o
segundo o mais moderno que trata
das propriedades dos materiais
semicondutores, ou seja, dos disposi-
tivos de estado slido.
Em nosso curso trataremos basi-
camente dos componentes de estado
slido que so:
Transistores bipolares
Os transistores so componentes
formados por trs pedaos de mate-
riais semicondutores como o silcio
P e o silcio N formando a estrutura
mostrada na figura 10.
Nesta figura tambm mostramos o
smbolo usado para os dois tipos de
transistores mais usados que so os
do tipo NPN e PNP.
Os transistores so os componen-
tes mais importantes dos circuitos
Figura 5 - Transformador: smbolo e aspecto.
Figura 6 - Diodos.
Existem tipos especiais de diodos
que podem operar como transdutores
e dos quais falaremos oportunamente.
Transdutores ou sensores
Existem diversos tipos de disposi-
tivos que podem ser usados para con-
verter sinais eltricos em formas de
energia diferentes como som, luz, etc.
e dispositivos que servem como
sensores. Na figura 9 temos alguns
deles.
a) Alto-falantes convertem ener-
gia eltrica em sons. So especifi-
cados pela impedncia em ohms,
potncia em watts e pelo tamanho;
b) Transdutores piezoeltricos
so pastilhas de uma cermica es-
pecial que pode converter sinais el-
tricos em som;
c) Lmpadas convertem ener-
gia eltrica em luz;
d) LEDs so tipos especiais de
diodos (diodos emissores de luz) que
convertem energia eltrica em luz;
e) Motores convertem energia
eltrica em movimento e fora me-
cnica;
f) Solenides convertem ener-
gia eltrica em mecnica;
g) Elementos de aquecimento
convertem energia eltrica em calor;
h) Foto-resistores ou LDRs so
sensores de luz;
i) Termistores so sensores de
calor;
j) Foto-diodos so diodos usa-
dos como sensores de luz;
k) Chaves de mercrio so
sensores de posio.
Diodos
Os diodos so componentes
semicondutores que conduzem a cor-
rente num nico sentido. Na figura 8
temos os smbolos e aspectos dos
diodos mais usados nos circuitos pr-
ticos de Mecatrnica.
Estes componentes podem ser
especificados pela tenso e correntes
mximas de trabalho ou ainda por um
smbolo formado por letras e nme-
ros dado pelo fabricante como
1N4002, 1N4148, BA315, etc.
Os diodos possuem uma faixa em
seu invlucro que permite identificar
seu catodo.
Figura 7 - Transdutores.
13 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
eletrnicos, pois podem gerar e am-
plificar sinais alm de funcionar como
chaves controladas eletrnicamente.
Na figura 11 temos os aspectos de
alguns transistores comuns.
No grupo (a) temos os transisto-
res de baixa potncia que so desti-
nados a trabalhar com correntes pou-
co intensas. Em (b) temos os transis-
tores de mdia e alta potncia que so
usados para controlar correntes inten-
sas como, por exemplo, as que cir-
culam por um motor. Estes transis-
tores so dotados de elementos para
instalao num radiador de calor, con-
forme mostra a figura 12.
Observe que os transistores pos-
suem terminais de emissor (E), coletor
(C) e base (B) e devem ser ligados
corretamente em qualquer projeto.
Os transistores so indicados,
de fbrica, como BC548, 2N2222,
BF494, etc.
Para usar um transistor preciso
ter em conta a tenso mxima, a cor-
rente mxima e o ganho (fator de am-
plificao) que pode variar entre 5 e
10000.
Na operao normal, a corrente
aplicada base do transistor contro-
la a corrente que circula entre o emis-
sor e o coletor.
Transistores de efeito de campo
Um tipo de transistor muito usado
atualmente o FET ou Filed Effect
Transistor (Transistor de Efeito de
Campo) cujos smbolos e aspectos
so mostrados na figura 13.
Tiristores
Os tiristores so dispositivos
semicondutores destinados ao contro-
le de correntes intensas, havendo dois
tipos principais que podemos encon-
trar nos projetos de Mecatrnica: os
SCRs (Diodos Controlados de Silcio
ou Silicon Controlled Rectifier) e os
TRIACs cujos smbolos e aspectos
so mostrados na figura 15.
Os SCRs disparam quando um
pulso de tenso aplicado na sua
comporta (gate). Nos circuitos de cor-
rente contnua os SCRs permanecem
em conduo mesmo depois que o
pulso desaparece. Para deslig-los
preciso interromper a alimentao. Os
SCRs conduzem a corrente num ni-
co sentido como os diodos.
J os TRIACs conduzem a corren-
te nos dois sentidos quando dispara-
dos e por isso so indicados para o
controle de dispositivos em circuitos
de corrente alternada.Os SCRs e
TRIACs comuns podem controlar cor-
rentes que vo de 500 mA a mais de
1000 A. Os de maior corrente so do-
tados de recursos para montagem em
dissipadores de calor.
Figura 9 - Aspectos dos transistores.
Figura 10 - Transistor montado em
radiador de calor.
Figura 11 - Os transistores de efeito de campo.
Nestes transistores a tenso apli-
cada comporta (g) controla a cor-
rente que circula entre o dreno (d) e a
fonte (s).
Os pequenos transistores de efei-
to de campo podem ser usados como
amplificadores e osciladores enquan-
to que os maiores denominados
POWER FETs ou ainda POWER
MOSFETs ou transistores de efeito
de campo de potncia podem con-
trolar correntes muito intensas (de at
dezenas de ampres) sendo por isso
muito empregado em controles de
motores nos projetos de Mecatrnica.
Basta aplicar uma tenso positiva
de alguns volts na comporta de um
Power FET para que a resistncia en-
tre o dreno e a fonte (Rds) se reduza
a uma frao de ohm e uma corrente
muito intensa possa circular alimen-
tando um circuito externo como mos-
tra a figura 14.
Os FETs de potncias so indica-
dos por si gl as como IRF6490,
IRF132, etc.
Figura 13 - SCRs e TRIACs.
Figura 8 - Transistores bipolares. Figura 12 - Controlando um motor com um
Power MOSFET ou Power FET.
MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
14
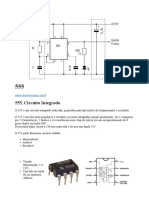
Circuitos Integrados
Num nico invlucro podem ser
encontrados conjuntos de componen-
tes j interligados de modo a formar
um circuito que exera determinada
funo como, por exemplo, um am-
plificador, um circuito de controle, um
oscilador, etc. Os dispositivos deste
tipo recebem o nome de circuitos in-
tegrados e so representados por sm-
bolos que na verdade apenas do o
seu tipo e no o circuito equivalente
interno, conforme mostra a figura 16.
O uso de circuitos integrados sim-
plifica o projeto j que alguns tipos
podem conter centenas de transisto-
res, resistores e outros componentes
j interligados e prontos para uso ne-
cessitando apenas poucos componen-
tes adicionais externos.
Na figura 17 temos os aspectos
mais comuns dos circuitos integrados
que podemos encontrar nos trabalhos
de Mecatrnica.
Figuras 14 - Smbolos dos CIs.
Figura 15 - Aspectos dos CIs.
Alguns circuitos integrados que se
destinam ao controle de altas corren-
tes, por gerarem bastante calor ao fun-
cionar, so dotados de recursos para
a montagem em radiadores de calor.
Os circuitos integrados so espe-
cificados por grupos de letras e nme-
ros como, por exemplo, LM555,
CA3140, 4017, NE567, etc. Nas listas
de materiais dos projetos, comum
acrescentar-se a funo do circuito
integrado como, por exemplo, timer
(temporizador), circuito lgico (CMOS
ou TTL), regulador de tenso, etc.
Os microprocessadores e os
microcontroladores so um tipo especial
de circuito integrado que se destinam ao
controle e processamento de informaes
na forma digital. Alguns micropro-
cessadores podem conter mais de 5 mi-
lhes de transistores em seu interior.
c) Acessrios
Os acessrios so partes de um
projeto que no fazem propriamente
parte dos circuitos, mas que so im-
portantes. Estes componentes susten-
tam partes de circuito ou fazem sua
conexo. Temos os seguintes exemplos:
Placas de circuito impresso
Os componentes eletrnicos so
montados e soldados em placas de
materiais isolantes onde existem gra-
vadas trilhas de cobre que funcionam
como os fios de ligao entre estes
componentes. Elas so denominadas
placas de circuito impresso. Na figura
18 temos um exemplo de placa.
O padro ou desenho das trilhas
de cobre de uma placa depende do
circuito que vai ser montado. Assim,
para as fbricas o que se tem um
projeto e uma produo em massa
para a placa que vai suportar o circui-
to determinado em fabricao. Para a
montagem de um prottipo, como
ocorre num laboratrio de Meca-
trnica ou por um amador, por exem-
plo, a placa deve ser projetada e
manufaturada individualmente.
O projeto pode ser feito manual-
mente ou por meio de programas
como o MultiSIM da Electronics
Workbench que simula o circuito e
desenha sua placa. As placas so
ento gravadas e corrodas utilizan-
do-se kits que contm as substn-
cias necessrias a isso.
Figura 16 - Placas de circuito impresso.
15 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
Outra possibilidade para o proje-
to e montagem de prottipos a uti-
lizao de matrizes de contactos e
placas universais como as mostra-
das na figura 19.
Na matriz de contatos os compo-
nentes so encaixados sem a neces-
sidade de solda e interligados com
pedaos de fios. A troca de configu-
raes simples e uma vez verifica-
do o seu funcionamento pode-se par-
tir para uma montagem definitiva.
Uma placa com o mesmo padro
permite transferir diretamente o pro-
jeto para uma verso definitiva com
componentes soldados.
Outros elementos acessrios so
mostrados na figura 20 e so de gran-
de utilidade tais como:
- Suporte de pilhas;
- Botes de controle;
- Suportes de fusveis;
- Tomadas e conectores;
- Interruptores e chaves;
- Cabos de ligao;
- Caixas para montagem;
- Soquetes para circuitos integrados;
- Radiadores de calor;
- Bornes e garras jacar.
Ao tratar dos projetos prticos
ser comum agregarmos s listas de
materi ai s al guns dos el ementos
acessrios.
CONCLUSO
O que vimos nesta nossa primeira
lio foi apenas uma viso geral dos
componentes eletrnicos usados nos
projetos de Mecatrnica.
Para um aprofundamento maior
nestes componentes e no seu uso
sugerimos que os leitores leiam o
Curso Bsico de Eletrnica de
Newton C. Braga que traz todos os
elementos para que se trabalhe com
circuitos e componentes de uma for-
ma mais profunda.
Neste livro tambm so dadas as
tcnicas de montagem com o uso do
soldador que a ferramenta bsica
para este tipo de trabalho.
PARTE PRTICA
Na nossa primeira lio no pode-
mos partir para projetos completos de
imediato. Assim, nosso primeiro circui-
to eletrnico ser bastante simples
para que os leitores tenham contato
com as tecnologias e componentes
que sero comuns daqui para frente.
Montaremos trs circuitos bas-
tante simples:
Figura 18 - Circuito eltrico simples.
Figura 19 - "Um aero-barco".
Figura 17 - Exemplos de uma placa universal
(a) e de matriz de contatos (b).
MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
16
a) Circuito Eltrico Simples
Um circuito eltrico simples for-
mado por uma fonte de energia (bate-
ria) um dispositivo de controle (inter-
ruptor) e uma carga (que dispositivo
que deve ser alimentado pela bateria).
Como primeiro projeto podemos
mostrar o modo de se alimentar uma
lmpada ou um motor usando pilhas
conforme mostra a figura 20.
Neste projeto o nmero de pilhas
ligadas em srie determinado pela
tenso que o motor ou lmpada pre-
cisa para funcionar. Assim, levando
em conta que cada pilha fornece 1,5
V, temos de usar 2 pilhas se a lm-
pada ou motor for de 3 V e 4 pilhas
se for de 6 V.
O tamanho das pilhas, se peque-
nas (AA), mdias ( C ) ou grandes
(D) depende do consumo ou potn-
cia do motor. Normalmente, nas apli-
caes em que o motor tem de fazer
fora devem ser usadas pilhas m-
dias ou grandes.
Um fato importante que deve ser
observado neste primeiro experimen-
to que o leitor pode fazer que o sen-
tido de rotao do motor depende da
polaridade das pilhas. Invertendo as
pilhas o motor inverte a rotao.
Na figura 21 mostramos um pro-
jeto simples baseado neste circuito
Figura 21 - Controle completo de motor DC.
Figura 22 - Um controle completo para elevador.
que um aerobarco movido pi-
lhas. Basta acoplar uma hlice ao eixo
do motor e com a escolha do sentido
apropriado da corrente no motor faze-
mos com que ela propulsione o pe-
queno barco que pode ser at uma
simples prancha de madeira que flu-
tue com as pilhas e motor.
b) Controlando um Motor
Se o sentido de rotao de um
motor de corrente contnua depende
do sentido de circulao da corrente
ou polaridade das pilhas, a fora que
ele faz tambm pode ser controlada
com a ajuda de componentes como
diodos ou resistores.
Na figura 22 mostramos como po-
demos controlar o sentido de rotao
de um motor com uma chave revers-
vel (HH) e a velocidade com trs
diodos 1N4002.
O motor usado pode ser aprovei-
tado de qualquer brinquedo eletrni-
co ou mesmo adquirido separadamen-
te devendo apenas o leitor observar
qual a sua tenso nominal de ali-
mentao.
Os dois circuitos podem ser as-
sociados num nico conforme mos-
tra a figura 23.
Figura 20 - Dois controles para motor DC.
17 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
ELETRNICA
A chave S
1
faz com que o motor
gire num sentido e noutro, a chave
S
2
liga e desliga o motor e a chave
S
3
muda sua velocidade. Quando a
chave est aberta os diodos redu-
zem a tenso aplicada ao motor.
Cada diodo de silcio pode reduzir em
0,7 V a tenso. Quando a chave est
fechada o motor recebe a alimenta-
o total e roda com mxima veloci-
dade (e potncia).
Podemos usar dois diodos para
reduzir em 1,4 V a tenso ou trs
diodos para reduzir em 2,1 V.
Uma aplicao interessante num
projeto de Mecatrnica para este cir-
cuito o elevador mostrado na figura
24 em que temos um controle sobe-
desce pela inverso do motor, e de
fora conforme o peso que ele tem de
manusear.
c) Ligao Srie e Paralelo
Motores e outras cargas alm de
fontes de energia podem ser ligados
em srie ou em paralelo.
Quando ligamos pilhas em srie as
suas tenses se somam, e quando li-
gamos em paralelo aumentamos sua
capacidade de fornecimento de cor-
rente mas a tenso se mantm con-
forme mostra a figura 25.
Para as as cargas tambm pode-
mos lig-las em srie ou em paralelo
conforme mostra a figura 26.
Veja na mesma figura o que ocor-
re com as correntes e tenses nos dois
casos.
Podemos mostrar o que acontece
com as tenses na prtica usando
duas lmpadas de 6 V x 50 mA e qua-
tro pilhas comuns no experimento da
figura 27.
Quando as pilhas esto em para-
lelo a tenso em ambas 6 V e elas
acendem com mximo brilho. Quan-
do so ligadas em srie cada uma re-
cebe apenas 3 V e elas acendem com
brilho reduzido. l
Figura 23 - Associando pilhas.
Figura 24 - Ligao de cargas em srie e em paralelo.
Figura 25 - Experincia prtica: ligao srie/paralelo.
Na prxima edio: Os
Motores de Corrente Cont-
nua e Circuitos de Controle.
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001 18
PNEUMTICA
INTRODUO
Atualmente, as empresas insta-
ladas em nosso pas esto, cada vez
mais, preocupadas com a evoluo
da concorrncia internacional, as
quais oferecem produtos de alta qua-
lidade e com preos competitivos, re-
sultados dos investimentos realiza-
dos ao longo destes anos na
Automao Industrial. Seja na rea
produtiva, controle de materiais, con-
trole de qualidade, embalagens, pro-
dutividade, segurana, entre outros,
estas empresas esto procurando a
melhor soluo para enfrentar a con-
corrncia acirrada provocada pelas
necessidades de consumo cada vez
maior em nosso Planeta. E o cami-
nho encontrado est relacionado na
Automao.
No Brasil, so poucas as
Empresas preocupadas
em orientar seus Enge-
nheiros, Tcnicos em
Instrumentao e/ou em
Mecatrnica, para o
campo da Automao
Industrial devido falta
de pessoal qualificado.
O objetivo principal
desta srie de artigos ser
preparar os leitores para o
segmento da Automao
Pneumtica, enfocando te-
mas como, por exemplo, des-
de a instalao de um com-
pressor de ar comprimido at
os comandos de contro-
ladores lgicos, onde a Pneu-
mtica e a Eletrnica se fazem
presentes, percorrendo juntas para
as mais diversas aplicaes.
Este programa ser desenvolvi-
do atravs de partes publicadas nes-
ta revista, cuja pretenso no ser a
de transform-las num Manual Com-
pleto de Automao Pneumtica e
sim, fornecer requisitos bsicos para
que os leitores possam ter uma inicia-
o aos projetos pneumticos, levan-
do em considerao: a gerao do ar
comprimido, sua preparao e trata-
mento, seus comandos, clculos de
consumo, vazo, entre outros pontos
de fundamental importncia para que
no final atenda suas expectativas de
utilizao.
Em resumo, estaremos sempre
enviando informaes atualizadas e
seguras, complementando com arti-
gos tcnicos, visando a preparao
dos alunos para o desenvolvimen-
tos nos mais variados setores da
Automao Industrial e com as mais
modernas utilizaes desta fonte de
energia, o ar comprimido.
UM POUCO DA HISTRIA DO AR
COMPRIMIDO
O ar comprimido adquiriu impor-
tncia em aplicaes industriais, so-
mente na segunda metade do scu-
lo XIX. No entanto, sua utilizao
anterior Da Vinci que, em seus in-
meros inventos, utilizou a energia do
ar comprimido.
AUTOMAO PNEUMTICA AUTOMAO PNEUMTICA
AUTOMAO PNEUMTICA AUTOMAO PNEUMTICA AUTOMAO PNEUMTICA
1 par 1 par 1 par 1 par 1 parte te te te te
Jos Carlos Amadeo
Centro Universitrio Salesiano de So Paulo
19 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PNEUMTICA
Na fundio da prata, do ferro, do
chumbo e do estanho, so encontra-
das referncias do ar comprimido
datadas no Velho Testamento. A his-
tria conta que, h mais de 2.000
anos, tcnicos da poca construram
mquinas pneumticas, utilizando
para tal fim, um Cilindro de madeira
dotado de um mbolo. J o vento era
aproveitado pelo antigos, utilizando
sua fora gerada pela dilatao do ar
aquecido.
Em Alexandria, centro cultural
do mundo helnico, foram cons-
trudas as primeiras mquinas, no
III sculo A C.
Neste perodo, Ctesibios fundou
a Escola de Mecnicos em Ale-
xandria, tornando-se o precursor da
tcnica para comprimir o ar. Na mes-
ma poca, um grego chamado Hero,
escreveu um artigo de dois volumes
sobre as aplicaes do ar comprimi-
do e do vcuo.
Tais inventos, por falta de recur-
sos e de materiais adequados, no
foram amplamente utilizados. Suas
tcnicas eram depreciadas, a no ser
que estivesse servio dos reis e
do exrcito, para aprimoramento de
armas de guerra.
Durante um longo perodo, a ener-
gia pneumtica sofreu uma paralisa-
o, renascendo somente nos scu-
los XVI e XVII, com as descobertas
de Galileu, Otto Von Guericke, Robert
Boyle, Bacon e outros, que passa-
ram a observar as leis naturais so-
bre compresso e expanso dos
gases. Leibiniz, Huyghnes, Papin e
Newcomem so considerados os pais
da Fsica Experimental, sendo que
os dois ltimos consideravam a pres-
so atmosfrica como uma fora
enorme contra o vcuo efetivo, que
era o objeto das Cincias Naturais,
Filosficas e da Especulao Teol-
gica desde Aristteles at o final da
poca Escolstica.
No final deste perodo, o Evange-
lista Torricelli, inventa o barmetro,
um tubo de mercrio para medir a
presso atmosfrica.
Com a inveno da mquina de
vapor, por Watts, tem incio a era da
mquina e, no decorrer dos scu-
los, surgiram vrias maneiras de uti-
lizao do ar, proporcionando, desta
forma, maiores conhecimentos fsicos
e alguns instrumentos de medio.
Neste longo caminho, das mqui-
nas impulsionadas por ar comprimi-
do, na Alexandria, at nos dias de
hoje, com o desenvolvimento da Ele-
trnica, o homem sempre tentou apri-
sionar esta energia, colocando-a aos
seus servios, controlando e trans-
formando-a em trabalho.
O termo pneumtica derivado
do grego Pneumos ou Pneuma, que
quer dizer: respirao, sopro, e de-
finido como o segmento da Fsica
que se ocupa da dinmica e dos fe-
nmenos fsicos relacionados com
os gases e com o vcuo, bem como
com os estudos da converso da
energia pneumtica em energia me-
cnica, atravs de seus elementos
de trabalho.
Voltaremos em outros captulos
a contar um pouco mais sobre a His-
tria do Ar Comprimido.
PRINCPIOS BSICOS
Propriedades fsicas do ar
Sem a existncia do ar, no ha-
veria vida em nosso planeta. Apesar
de no possuir uma forma fsica,
podemos notar sua presena em to-
dos os lugares. Por ser elstico e
compressvel ocupa todo o espao
onde est contido. Sua composio
principal constituda por Nitrognio
(78,09%) e Oxignio (20,95%). Os re-
sduos de Dixido de Carbono,
Argnio, Hidrognio, Nenio, Hlio,
Criptnio e Xennio formam os de-
mais componentes desta mistura
gasosa que respiramos (figura 1).
Compressibilidade
Um volume de ar, quando subme-
tido por uma fora exterior, como por
exemplo, em um atuador pneumti-
co (cilindro), seu volume inicial ser
reduzido, revelando uma de suas
propriedades: a compressibilidade,
que mostrada na figura 2.
Figura 2 - Compressibilidade do ar.
Figura 1 - Propriedades fsicas do ar.
Elasticidade
Como j mencionado, o ar possui
a propriedade de elasticidade, que faz
com que, uma vez desfeita a funo
da compressibilidade, este volte ao
seu volume incial (figura 3).
Figura 3 - Elasticidade do ar.
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001 20
PNEUMTICA
Difusibilidade
Em processos industrias, co-
mum a aplicao da difusibilidade do
ar, que faz com que haja uma mis-
tura homognea com qualquer meio
gasoso no saturado (figura 5).
Figura 4 - Difusibilidade do ar.
Expansibilidade
Como mencionado anteriormente,
o ar ocupa o volume total de um reci-
piente. Sendo assim, importante
ter em mente esta propriedade de
expansibilidade quando formos pro-
jetar qualquer reservatrio de ar com-
primido, tubulaes contendo tan-
ques, ou mesmo quando se for ins-
talar uma rede de ar comprimido. Este
importante assunto ser abordado
mais tarde (figura 5).
Peso do Ar
Ser que o ar tem peso? pos-
svel verificar isso atravs de uma
experincia. Se colocarmos, numa
balana de preciso, dois recipien-
tes de mesmo formato e peso, her-
meticamente fechados, iremos no-
tar, obviamente, que a balana ir
registrar o mesmo peso, conforme
Figura 5 - Expansibilidade do ar.
Figura 6 - O peso do ar. Na situao (a), os dois recipientes contm a mesma quantidade de ar
enquanto que na situao (b), somente o recipiente 2 contm ar ao passo que o 1 est sem ar (vcuo).
demonstrado na figura 6(a). Em
seguida, se retirarmos o ar de um
dos recipientes, com o uso de uma
bomba de vcuo e os colocarmos
novamente na balana, notaremos
que o recipiente sem ar estar
mais leve que o outro, que ainda
contm ar, conforme mostrado na
figura 6(b).
Apenas como notao, um litro de
ar, a uma temperatura de 0C e ao
nvel do mar, pesa 1,293 x 10
-3
Kg.
Podemos afirmar que ar quente
mais leve que o ar frio ?
Quando utilizado em processos
de automao industrial, notamos
esta propriedade do ar comprimido.
O ar atmosfrico aspirado pe-
las vlvulas de admisso dos com-
pressores de ar e neste processo, o
ar comprimido atinge uma tempe-
ratura de, aproximadamente, 200
C, tornando-se mais leve. Alm dis-
so, arrasta consigo, partculas de
vapores de gua para a rede de ar
comprimido.
Esta impor tante preocupao,
ser revista no captulo: "Tratamento
e Preparao do Ar Comprimido" que
ser publicado futuramente.
Voltemos a nossa questo: no tex-
to acima, mencionamos que o ar
quente torna-se mais leve quando
submetido ao processo de compres-
so. Para comprovar isso, pode-se
fazer uma experincia, semelhante
21 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PNEUMTICA
descrita anteriormente, com a dife-
rena de que agora, ao invs de reti-
rarmos o ar de um dos recipientes
vamos elevar a sua temperatura. Ao
fazer isso, e retornarmos o recipien-
tes de volta na balana, notaremos
que aquele com o ar mais quente
estar mais leve.
O Barmetro de Torricelli
Torricelli provou que possvel
medir a presso atmosfrica, presen-
te em todos os lugares, inclusive
sobre o nosso corpo, atravs de seu
invento, que se tornou muito famo-
so, o barmetro de mercrio.
A idia principal contida na expe-
rincia realizada por Torricelli que
ao colocar um tubo de vidro, sem ar
dentro dele e, portanto sem a atua-
o da presso atmosfrica, na po-
sio vertical em um recipiente con-
tendo gua, possvel notar que o
nvel deste lquido ir subir e se man-
ter numa determinada altura, porque
a presso atmosfrica ir exercer
uma fora, que se equilibrar ao peso
desta coluna de gua. No caso des-
te lquido, especificamente, o equil-
brio se d, quando a coluna estiver
com 10,33 metros (desde que se
esteja no nvel do mar e numa tem-
peratura de 0)
Por conta do tamanho do tubo que
necessrio utilizar, a experincia
torna-se muito incmoda, pois onde
conseguir um tubo de vidro de, pelo
menos, 10,33 metros de altura, sem
deixar que este caia e quebre?
Esta foi a mesma concluso que
Torricielli chegou. Da, este fsico te-
ve a idia de utilizar um lquido mais
denso que a gua. No caso foi utili-
zado o mercrio, pois uma mesma
massa deste lquido, ocupa um me-
nor volume, em comparao com a
gua.
Dessa forma, Torricelli provou que
a presso atmosfrica capaz de
equilibrar uma coluna de apenas 0,76
m em uma rea de 1 cm
2
.
Para visualizar esta experincia
em relao ao tamanho do tubo, ob-
serve a figura 15, onde possvel
notar a relao entre as colunas de
Figura 7 - O ar quente (T
2
) possui uma densidade menor que o ar frio (T
1
).
Figura 8 - Comparao entre os barmetros de mercrio e de gua.
mercrio e a gua. Se compararmos
as duas, iremos notar que a coluna
de mercrio 13,6 vezes menor que
a coluna de gua.
Com tudo isso, pode-se deduzir
que aquela coluna (que ficou incomo-
da para se conseguir) de 10,33
metros de coluna de gua, ser igual,
em peso, uma coluna de mercrio
de 0,76 metros.
Efetuando nossas contas, iremos
concluir que10,33 dividido por 13,6
ser igual a 0,759, ou seja, pratica-
mente os 0,76 m.
O que Torricelli nos comprovou,
portanto, que a presso atmosfri-
ca atua em todos os sentidos e dire-
es com, praticamente, a mesma
intensidade e equivalente a 760 mm
de uma coluna de mercrio de qual-
quer seo transversal a 0 C ao n-
vel do mar. E a grande utilidade des-
te invento que conhecendo-se a
relao entre a presso e a altura
da coluna de mercrio, possvel
descobrir qual a presso numa
deter mi nada si tuao, bastando
para isso medirmos a altura da co-
luna de mercrio.
Na prxima lio, iremos abordar
algumas caractersticas fsicas dos
gases e como se do as transforma-
es de presso, volume e tempera-
tura de um gs. At l!
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROGRAMAO
22
APRESENTAO
Este o primeiro artigo de uma
srie que ir mostrar como a lingua-
gem LOGO pode ser utilizada para
programar o PC no controle de robs
e outros dispositivos para automao.
Com a facilidade de se ter acesso a
um PC junto com a linguagem
LOGO, de fcil aprendizagem, con-
seguimos um timo resultado no de-
senvolvimento de programas e
interfaces para estes controles.
O PC atualmente est invadin-
do nossos lares. Com ele conse-
guimos verificar o nosso saldo ban-
crio, pagar as contas, jogar entre
inmeras outras tarefas. Geralmen-
te lidamos com programas prontos,
que colocamos num PC e nos tor-
namos meros operadores deles.
Voc j pensou em fazer um des-
ses programas? Difcil! Impossvel!
Imaginvel! Se estivermos falando
de um editor de texto complexo ou
um jogo simulador de Frmula 1,
realmente ser uma tarefa rdua
que necessitar de uma equipe com
vrios programadores experien-
tes. Mas nem por isso voc
deve desanimar, pois
se fosse assim
ningum comea-
ria a programar
computadores.
Este o papel
desta revista.
Vamos incentivar
voc a descobrir os
caminhos para fazer o
PC realizar diversas
tarefas que voc desejar. Legal?
muito legal. Voc vai perceber como
interessante essa interao entre
voc e a mquina e, principalmente,
sendo voc que tem o controle do
processo.
Mas voc pode estar se pergun-
tando: Como eles vo fazer que eu
faa um programa se eu no sei nada
de programao?
A resposta simples: Quem vai
fazer todo o trabalho ser voc.
Como j dissemos, vamos ser os
seus incentivadores.
Nesa srie de artigos, vamos fa-
lar de teoria, mostrar exemplos prti-
cos e dar sugestes para alterao
dos programas.
LINGUAGEM LOGO P LINGUAGEM LOGO P
LINGUAGEM LOGO P LINGUAGEM LOGO P LINGUAGEM LOGO PARA ARA
ARA ARA ARA
ROBTICA E AUTOMAO ROBTICA E AUTOMAO
ROBTICA E AUTOMAO ROBTICA E AUTOMAO ROBTICA E AUTOMAO
1 Par 1 Par 1 Par 1 Par 1 Par te te te te te
Luiz Henrique Corra Bernardes
23 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROGRAMAO
Como voc vai ter controle de
todo o processo, voc vai poder mo-
dificar, implementar novas funes e,
inclusive, fazer novos programas.
Voc deve estar dizendo: Falan-
do assim parece fcil, mas realmen-
te qual o pr-requisito que preciso
para fazer tudo isso? Como res-
posta podemos dizer que alm de
acesso a um PC que tenha um sis-
tema operacional Windows 95 ou su-
perior, e o que mais ser necessrio
ser persistente, e no d esanimar
nas primeiras dificuldades. Pois o pro-
cesso de aprendizagem de programa-
o baseado na tentativa, erro e
correo do erro. o que costuma-
mos dizer de Erra, erra, erra, erra,
acerta, o que significa que sero
muito mais erros que acertos! Por
isso ser persistente!
Vamos comear. Mas por onde?
Simples. Pelo PC. Vamos descrever,
de uma maneira simples, o seu fun-
cionamento e suas principais partes.
Em seguida, vamos falar de lingua-
gens de programao, e ai que en-
tra o LOGO. Aps isso estaremos
prontos para fazer os nossos primei-
ros programas para controlar robs e
outros dispositivos para automao.
O PC (do ingls Personal
Computer traduzindo: Computador
Pessoal) uma mquina digital feita
para processar dados na forma bin-
ria, isso significa que ele entende so-
mente zeros e uns e nada mais. As
instrues (cdigo de mquina) que
a CPU do PC executa so combina-
es de zeros e uns (ou um nmero
binrio). Veja na figura 1 as principais
partes de um PC.
A CPU (do ingls Central Process
Unit ou Unidade de Processamento
Central) o corao do PC. a res-
ponsvel por executar as seqncias
de instrues do processador. Na fi-
gura 1 voc pode analisar que temos
mais coisas alm da CPU. Entre os
outros componentes impor tantes
esto os vrios tipos de memria,
que so lugares onde armazena-
mos dados na forma de bytes. Por-
tanto um disco rgido (em ingls HD
de Hard Disk), a unidade de dis-
co flexvel (em ingls floppy disk)
e a memria RAM so lugares onde
armazenaremos dados e programas
em um PC.
Para simplificarmos como uma
memria funciona para a CPU, pode-
mos imaginar um imenso prdio (fi-
gura 2) onde cada andar armazena
um dado (byte), portanto para poder-
mos guardar ou pegar o dado neces-
sitamos saber qual andar do dado.
Isso chamado de endereamento,
que significa que a CPU consegue
manusear (ler e escrever) os dados
corretamente porque ela consegue
enderear cada posio de memria.
Agora, da nossa figura 1, sobrou
os I/Os (do ingls Input/ Output tra-
duzindo em entrada/sada) que so
o teclado, vdeo, porta paralela para
impressora, porta serial e joystick.
Podemos dizer, de uma maneira bem
simplificada, que os I/Os se compor-
tam como a descrio da memria,
Figura 1 - Principais partes que compem um PC.
Figura 2 - Armazenagem dos dados na CPU.
BINRIO, BIT E BYTES
Na base decimal temos 10 elementos (0 a 9) para representar
nmeros quando necessitamos representar um nmero maior que
9 necessitamos utilizar 2 ou mais desses elementos. Na base bi-
nria o processo o mesmo, s que temos somente 2 elementos
(0 e 1), portanto se quisermos representar um nmero maior que
1 temos que utilizar dois ou mais desses elementos, por exemplo,
8 em decimal equivale a 1000 em binrio.
Portanto Bit um desse elemento e s pode valer 0 ou 1 e Byte
o conjunto de 8 bits que pode representar um nmero em deci-
mal de 0 a 255.
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROGRAMAO
24
sendo que a CPU pode ler ou escrever dados nos I/Os
utilizando instrues especiais.
Apesar de um PC ser uma mquina complexa, o que
precisaremos saber por enquanto que no PC temos
uma CPU que executa instrues manuseando dados e
que tem acesso memria e I/Os atravs de
endereamento.
LINGUAGENS DE
PROGRAMAO
Conforme j vimos, a CPU s entende instrues que
so combinaes de zeros e uns (nmeros binrios) e
nada mais. Na realidade uma CPU no tem intelign-
cia. Ela tem, na verdade, muita rapidez, conseguindo
executar uma quantidade muito grande de instrues
por segundo. possvel fazer com que um computa-
dor fique, inteligente fazendo com que ele execute
um programa que formado por vrias seqncias de
instrues. A maneira como montamos a seqncia
em que as instrues sero executadas chamamos
de Programao.
Em um PC necessitamos ter um Sistema Operacional
que vai gerenciar a execuo dos programas. Atualmen-
te, o mais utilizado o Windows da Microsoft, que um
sistema operacional multitarefa, pois consegue gerenciar
a execuo simultnea de vrios programas.
Como j dissemos vrias vezes (s para fixar!) a CPU
s entende nmeros binrios, portanto um programa
uma seqncia de nmeros binrios. Voc deve estar
pensando: Como programar utilizando somente nmeros
binrios? Realmente seria uma tarefa muito difcil e can-
sativa. Entretanto, para solucionar este problema, foi de-
senvolvida a linguagem ASSEMBLY, conhecida como lin-
guagem de mquina onde para cada instruo da CPU
representada por um mnemnico (palavra que nos faz
lembrar o funcionamento da instruo). Existe tambm
um compilador (Assembler) que vai interpretar os
mnemnicos e convert-los para instrues binrias que
a CPU entende.
Apesar da linguagem Assembly ter facilitado muito a
programao, ela uma linguagem de baixo nvel e com
uma curva de aprendizado longa, pois o baixo de baixo
nvel no tem significado pejorativo e sim de acesso to-
tal ao hardware do PC. Portanto com a linguagem
Assembly podemos fazer programas com plenos pode-
res sobre o hardware do PC.
Para facilitar o aprendizado e aumentar a produtivida-
de, foram desenvolvidas as linguagens de alto nvel
(Fortran, Cobol, C, Pascal, etc.), onde o alto significa
que o programador est mais distante do hardware do PC
e no precisa se preocupar com pequenos detalhes e
sim com a lgica de programao.
Mas no esquea que no existe mgica. No final, o
nosso programa de alto nvel vai ser compilado e vai se
transformar em uma seqncia de nmeros binrios!
Analise o box ao lado e veja as diferenas de um pro-
grama em alto nvel e baixo nvel.
PROGRAMA EM BAIXO NVEL ESCRITO
EM LINGUAGEM ASSEMBLY
NAME teste1
_TEXT SEGMENT WORD PUBLIC CODE
_TEXT ENDS
_DATA SEGMENT WORD PUBLIC DATA
_DATA ENDS
CONST SEGMENT WORD PUBLIC CONST
CONST ENDS
_BSS SEGMENT WORD PUBLIC BSS
_BSS ENDS
DGROUP GROUP CONST, _BSS, DATA
ASSUME CS:_TEXT, DS:DGROUP, SS: DGROUP
EXTERN __acrtused:ABS
EXTERN __chktsk:NEAR
_BSS SEGMENT
COMM NEAR _j: BYTE: 2
_BSS ENDS
_TEXT SEGMENT
ASSUME CS: _TEXTE
PUBLIC main
_main PROC NEAR
push bp
mov bp,sp
mov ax,2
call __chkstk
push si
register si = i
sub si,si
jmp SHORT $F104
$FC105:
inc si
$F104:
cmp si,100
jl $FC105
mov WORD PTR_j,0
jmp SHORT $F107
$FC108:
inc WORD PRT_j
$F107:
cmp WORD PTR_j,100
jl $FC108
pop si
mov sp,bp
pop pb
ret
_main ENDP
_TEXT ENDS
END
PROGRAMA EM ALTO NVEL ESCRITO EM
LINGUAGEM LOGO
aprenda teste1
atribua i 0
atribua j 0
atque [:i>99] [atribua i :i+1 escreva :i
atque [:j>99] [atribua j :j+1 escreva :j ]]
fim
25 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROGRAMAO
Vale salientar que os dois programas fazem quase a
mesma coisa, um loop dentro do outro. Fica claro agora
que a programao em alto nvel mais fcil e no pre-
cisamos nos preocupar com vrios detalhes
do tipo alocao de memria e variveis.
Como curiosidade, rode o programa no
ambiente LOGO e veja o que acontece!
COMPILADOR VERSUS INTERPRETADOR
Conforme j foi visto, o compilador gera uma
seqncia de instrues de mquina que cha-
mamos de programa executvel. Isto significa
que esse programa no precisa mais do ambien-
te de programao para funcionar.
Quando falamos de um interpretador estamos
falando de um ambiente que ir interpretar instru-
o por instruo de nosso programa. Mas porque
estamos falando disso? Simples. Para explicar
como o ambiente LOGO funciona, pois ele um
interpretador, portanto no iremos gerar nenhum
executvel. Para que um programa em LOGO funcione,
necessariamente deveremos estar operando dentro do
ambiente LOGO pois, nesse caso, o ambiente LOGO
um executvel. Bem, mas qual a vantagem ou desvanta-
gem? Primeiro a desvantagem: A velocidade de execu-
o. Como a interpretao de cada instruo necessita
de um determinado intervalo de tempo, o nosso progra-
ma em LOGO ser bem mais lento que um programa
executvel similar. Entretanto, para as nossas aplicaes,
o fator velocidade no ser to importante.
Agora a vantagem: Lembra-se que falamos do pro-
cesso Erra, erra, erra, erra, acerta? ai que est a van-
tagem. Como interpretamos uma instruo de cada vez,
se acontecer algum erro na execuo da instruo o pro-
grama pra e sinaliza o erro. Isso facilita muito a resolu-
o de problemas ou, como dizemos em ingls, debug
(traduzindo literalmente: retirar o inseto), que um termo
muito utilizado na
eletrnica digital e
informtica quando
desejamos resolver
um problema. Sua origem
vem da poca dos primeiros computadores, quando um
tcnico (americano!) estava concertando um computador
e o problema era um inseto que estava entre os circuitos.
QUAL AMBIENTE LOGO IREMOS UTILIZAR?
Escolhemos o SuperLogo 3.0 do NIED por vrios
motivos:
1 - O ambiente e a programao so feitos em portugus;
2 - Voc pode fazer o download (por R$ 5,00) atravs
da Internet no site do NIED: http://www.nied.unicamp.br
Aqui fazemos uma ressalva para parabenizar o belo
trabalho do NIED (Ncleo de Informtica Aplicada
Educao) da Universidade Estadual de Campinas,
onde foi aprimorado e traduzido o ambiente LOGO da
Softronics resultando no SuperLogo, uma excelente ferra-
menta de ensino para programao que pelo fato de ser
em portugus pode ser utilizada em qualquer nvel escolar.
possvel tambm, comprar uma verso multimdia,
distribuda pela Editora Melhoramentos, juntamente com
a Divertire (http://www.divertire.com.br), onde alm do
ambiente SuperLogo 3.0 existem vrios exemplos e vri-
os projetos de diversas reas educacionais.
INSTALANDO O SUPERLOGO VERSO 3.0
Para instalar o SuperLogo verso 3.0, basta executar
as seguintes etapas:
1. Fazer download do arquivo logo95.exe no site
do NIED http://www.nied.unicamp.br. V pgina de
softwares e publicaes e clique em SLogo/Windows95
conforme a figura 3.
Figura 3 - Fazendo o download do Programa SuperLogo a partir do
site do Nied.
MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROGRAMAO
26
2. Descompactar o arquivo slogo30.exe:
Para descompact-lo, execute o logo95.exe. Nesta
execuo ser criado o diretrio \install no drive C: do
seu PC, o qual conter os arquivos para a instalao
do SuperLogo.
3. Efetuar a instalao do SuperLogo:
Execute o arquivo SETUP.EXE (no diretri o
c:\install) atravs do Gerenciador de Arquivos do
Windows. Ser gerado um cone o qual dar acesso
ao SuperLogo. Aps obter sucesso na instalao, o
diretrio c:\install poder ser excludo.
4. Testando o Sistema
Para testar se tudo deu certo, execute o progra-
ma SuperLogo e acione em ajuda a opo DEMO
conforme mostra a figura 4. Essa opo de demons-
trao demonstra um pouco das possibilidades do
SuperLogo.
O LOGO E A TARTARUGA
No comeo do desenvolvimento do LOGO (1968)
os pesquisadores utilizavam um rob, que era coman-
dado pelo computador. Este, pelo seu movimento e
formato lembrava uma tartaruga. Com o desenvolvi-
mento dos computadores pessoais a tartaruga foi
transferida para a tela (veja figura 4).
Podemos comear a programar executando progra-
mas bem simples como desenhar um quadrado. Ento
mos a obra:
1 - Digite o comando parafrente 100 na linha de
comando como mostra a figura 5. Pressione a tecla
enter ou clique com o mouse em executar. Esse co-
mando ir movimentar a tar taruga para frente o
nmerode passos (100), ou seja, desloca a tartaru-
ga no sentido em que ela estiver apontando. Com isso
desenhamos um lado do quadrado.
2 - Execute o comando paradireita 90 e voc ver
que a tartaruga virou para a direita 90 graus.
3 - V executando comandos de parafrente 100 e
paradireita 90 at formar um quadrado conforme a
figura 6.
Que tal melhorar a nossa programao? Ento lim-
pe a tela grfica utilizando Restaurar a Janela Grfi-
ca na janela de comandos. Na linha de comandos exe-
cute o comando:
repita 4 [ pf 100 pd 90]
Voc ver que conseguimos fazer o mesmo qua-
drado digitando menos, esse comando na realidade
repete 4 vezes a seqncia parafrente 100 e paradireita
90 (aqui resumidas abreviadas para pf e pd).
Se tivermos algum procedimento que seja muito
utilizado, possvel armazen-lo e cham-lo quando
quisermos (veja o exemplo na figura 7). Para faz-lo:
1. Execute o comando EDITE quadrado
2. Editor ir aparecer. Escreva dentro da janela do
editor:
Figura 6 - Desenhando um quadrado.
Figura 4 - Executando o programa SuperLogo no modo de demonstrao.
Figura 5 - Comando "parafrente".
27 MECATRNICA FCIL N 1/OUTUBRO-NOVEMBRO/2001
PROGRAMAO
APRENDA QUADRADO
REPITA 4 [PF 100 PD 90]
FIM
3. fechar o Editor e salvar.
4. Execute o comando QUADRADO e o nosso qua-
drado ir aparecer novamente.
5. Para salvar o programa em Logo para ser utiliza-
do em outras oportunidades, basta ir em Arquivo no
menu principal e escolher Salvar Como, ento esco-
lha um nome com extenso LGO.
6. Para restaurar quando abrir o Logo novamente
v em Arquivo no menu principal e escolha a opo
Abrir, ento escolha o nome do programa.
Assim, aprendemos a fazer o nosso primeiro pro-
cedimento. Vamos incrementar um pouco e fazer uma
aplicao com recursos grficos de janela e botes
conforme mostra a figura 8:
O programa em Logo:
Figura 7 - Utilizando o editor de procedimentos.
Figura 8 - Uma aplicao com recursos grficos de janelas e botes.
Figura 9 - Menu de ajuda.
No interessante? Com poucos comandos con-
seguimos fazer um programa com recursos podero-
sos! Para saber como funcionam os comandos
criejanela e crieboto v em AJUDA na barra de
menu principal clique em Index, ento procure o co-
mando desejado (ex. figura 9).
PROPOSTA DE EXERCCIOS
1 - Elabore novos procedimentos para desenhar fi-
guras (ex. tringulo);
2 - Modifique o programa SABER para que ele
tenha mais botes que acionem os novos procedi-
mentos;
3 - Estude os arquivos de auxlio (AJUDA na Barra
de Menu Principal).
PRXIMOS PASSOS
Estamos chegando ao final dessa primeira parte
de uma srie de artigos, onde foram expostos vrios
conceitos de uma maneira simples, que sero impor-
tantes durante o processo de aprendizagem. Como j
dissemos anteriormente, seremos os grandes
incentivadores. Nas prximas edies comearemos
a integrar o PC com dispositivos externos. V se pre-
parando! Vai ser muito interessante e divertido.
aprenda SABER
criejanela main d1 [Saber Eletronica] 10 10 150 50
crieboto d1 b1 Quadrado 10 10 40 20 [quadrado]
crieboto d1 b3 LIMPA 60 10 40 20[tat]
fim
SOFTWARE
28 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001 MECATRNICA ATUAL N 1 OUTUBRO/NOVEMBRO/2001
INTRODUO
Com o avano no uso de compu-
tadores, fazer desenhos tcnicos e
ilustrativos se tornou uma tarefa bem
mais fcil e de melhor qualidade com
os programas de CAD. Por meio de-
les podemos construir, corrigir e
agilizar nossos desenhos com bas-
tante facilidade. Alm disto poss-
vel importar o que chamamos de bi-
bliotecas de desenhos, poupando
bastante tempo. Um exemplo na
Mecatrnica fazer o projeto de uma
planta hidrulica ou pneumtica. A
partir de componentes como vl-
vulas, motores e bombas j pron-
tos, basta fazer a conexo en-
AutoCAD para que este possa ser
animado em outro programa, como o
3D Studio.
H vrios programas do tipo CAD,
dentre eles o CATIA, Microstation,
Pro-Engineering e outros. Estamos
iniciando o curso sobre um progra-
ma de desenho bastante conhecido
na Engenharia, chamado de
AutoCAD, feito pela empresa
Autodesk. Muitos, quando pensam
em CAD, o primeiro programa que
lembram o AutoCAD. Ele popular
por vrios motivos, um deles sua
praticidade. Por exemplo, muitas pes-
soas que usam computador esto
acostumadas a acionar comandos
por menus e botes utilizando o
mouse, outras pessoas se adap-
tam melhor acionando estes por
meio do teclado. O AutoCAD per-
mite este acesso de ambas as
formas. Alm disso ele usa-
do para os vrios ramos da
Engenharia, com vastas
bibliotecas de dese-
nhos e programas
associados. O pro-
grama dividido
basicamente em
AutoCAD 2D (bi-
dimensional) para
desenhos de plan-
tas, desenhos de
montagem e fabri-
cao e o Auto-
CAD 3D para dese-
nhos tridimen-
sionais. Inicialmen-
te ser ensinado
o Auto-
AUTOCAD APLICADO AUTOCAD APLICADO
AUTOCAD APLICADO AUTOCAD APLICADO AUTOCAD APLICADO
MECA MECA
MECA MECA MECATRNICA TRNICA
TRNICA TRNICA TRNICA
1 par 1 par 1 par 1 par 1 par te te te te te
Srgio Eduardo Macdo Rezende
Departamento de Engenharia Mecatrnica e Sistemas Mecnicos
Escola Politcnica da USP
tre estes. O mesmo pode ser dito
para um projeto mecnico envolven-
do rolamentos, retentores e eixos.
Outro motivo para o uso de pro-
gramas CAD fazer ilustraes, prin-
cipalmente em trs dimenses. Isto
certamente facilita a compreenso de
uma pea ou da montagem de um
sistema. Por exemplo, um brao de
rob pode ser, inicialmente, desenha-
do em duas dimenses para se colo-
car as cotas ou a identificao de
componentes. Posteriormente pode-
se fazer um modelo tridimensional no
SOFTWARE
29 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
CAD 2D pois nesta parte que sero abordados os co-
mandos bsicos que tambm sero utilizados para 3D.
Com esta srie de artigos voc ser capaz de aprender
passo-a-passo os comandos mais importantes, para fa-
zer qualquer tipo de desenho. Esta baseada no AutoCAD
2000 (ltima verso) que apresenta algumas inovaes
como a possibilidade de abrir vrios desenhos
simultneamente e fcil alterao da espessura das li-
nhas. No entanto, como sero vistos os comandos mais
importantes, esta srie pode ser perfeitamente aplicada
para verses anteriores (R12, R13 e R14).
VISO GERAL DO AUTOCAD
Inicialmente preciso se familiarizar com a tela do
AutoCAD. Assim que o programa inicializado, podemos
observar, na tela, diversos detalhes importantes. O pri-
meiro deles o menu superior onde encontramos opes
importantes como o File, Edit, View, Draw e outros. Abai-
xo destas opes encontramos uma toolbar (caixa de fer-
ramentas) que, quando arrastada, pode ser deslocada para
qualquer posio da tela. Ela permite acessar os co-
Figura 1 Projeto mecnico.
Figura 2 Tela do
AutoCAD 2000.
Figura 3 Draw
Toolbar.
Figura 5 Visualizao
da Toolbar
Figura 6 Modificao da
abertura do cursor.
MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
SOFTWARE
30 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
mandos desejados, diretamente,
cl i cando-se na opo desej ada.
Para visualizarmos uma toolbar v
ao menu View, clique em Toolbar... e
selecione, por exemplo, a caixa Draw.
Um instrumento bastante importan-
te o cursor do AutoCAD. Por ele
possvel selecionar qualquer entidade
que estiver na tela. Caso se deseje
alterar sua abertura basta, no menu
superior, acessar Tools e em seguida
clique em Options. Na caixa de dilo-
go que aparecer clique na guia
Selection. Agora basta modificar a
barra de rolagem da regio Pickbox
Size at chegar a dimenso desejada.
Outro detalhe que pode ser obser-
vado fica na posio inferior esquer-
da, onde pode-se ver as coordena-
das em que o cursor se encontra.
Modifique sua posio e observe que
a marcao altera. Para modificar a
preciso acesse, no menu superior,
a opo Format e, em seguida, Units.
Na lateral esquerda observamos
uma figura bastante importante que
so os eixos coordenados. Por ele
podemos identificar as direes x e
y necessrias para o traado de li-
nhas, movimentos e cpias. So bas-
tante importantes para termos idia
de direo e sentido. Na regio infe-
rior da tela podemos observar o menu
inferior (onde h algumas frases es-
critas). Nele podemos destacar a
linha de comandos (onde est es-
crito Command) para ativar fun-
es, digitar valores e especificar
propriedades.
Para encerrar este reconhecimen-
to geral da tela do AutoCAD vamos
utilizar uma propriedade que pode ser
til quando se trabalha durante lon-
gos perodos com o programa. a
possibilidade de mudar a cor da tela.
Para isto clique em Tools, Options,
selecione a guia Display e o boto
Colors.
LINHAS E COMANDOS BSICOS
Linhas
Aps uma rpida apresentao e
localizao de partes importantes da
tela do AutoCAD podemos iniciar o
aprendizado de comandos fundamen-
tais. importante destacar que es-
tes comandos so to importantes
que so semelhantes em outros pro-
gramas do tipo CAD. O primeiro tipo
de desenho que faremos, e o mais
importante, o de linhas retas. Devi-
do sua importncia, h trs formas
de faz-las. Inicialmente vamos ape-
nas acionar o comando. Para isto h
vrias opes. A primeira , no menu
superior, selecionar Draw e Line e
clique em vrios pontos da tela para
observar a construo. Outra forma
de acion-la clicando no boto Line
da Toolbar Draw mostrada na figura
9. O modo que muitos consideram
mais rpido de acionamento da linha
digitar a letra l (ou line) no menu
inferior da tela e pressionar Enter.
Figura 7 Coordenadas do cursor.
Figura 8 Mudana de cor da tela.
Figura 10 Zoom
Realtime.
Figura 9 Acionamento do comando de
linha.
Zoom
Outro comando extremamente im-
portante o zoom, para observar de-
talhes ou o desenho como um todo.
Para acion-lo pelo menu superior
clique em View, Zoom e, por exem-
plo, em In. Outra forma clicando no
cone de Zoom Realtime. Em segui-
da posicione o cursor em qualquer
parte da tela, clique o boto esquer-
do do mouse e, mantendo o boto
clicado, movimente o mouse de um
lado para outro.
Uma terceira
forma de dar
zoom a se-
guinte: digite z
(ou zoom) no
menu inferior,
tecle Enter e
clique em dois
pontos para en-
quadrar o deta-
SOFTWARE
31 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
lhe desejado. Este chamado de
"zoom window".
Muitas vezes desejamos ter uma
viso geral do desenho de forma que
todo ele se enquadre na tela. Para
isto basta acionar o zoom, digitando
a letra z na linha de comandos, e em
seguida digitando all. rpido e ser
bastante til no futuro. Podemos per-
ceber que h vrias formas de utili-
zarmos o zoom. No fique preocupa-
do se no lembra de todos. O uso de
cada um deles depende da necessi-
dade. Ao fazer projetos e exerccios
mais longos, estes comandos ape-
nas facilitaro a execuo e sero
lembrados com mais facilidade.
Erase
Muitas vezes necessrio apa-
gar alguma parte do desenho. No
AutoCAD isto fcil de ser feito. Pri-
meiro pode-se, no menu superior,
Figura 11 Zoom window. Figura 12 Apagando linhas.
Figura 13 Primeiro modo de traar linhas.
clicar em Modify e posteriormente
em Erase. Uma forma mais rpida
digitar no menu inferior a letra e ou
erase, em seguida tecle Enter. Nes-
te menu aparecer escrito Select
Objetcs: Agora selecione as linhas
que se deseja apagar, elas ficaro
tracejadas. Terminando a seleo
basta teclar Enter novamente.
Formas de traar linhas
A primeira delas a que chama-
mos de coordenadas absolutas ou
cartesianas. Por geometria simples
sabe-se que por dois pontos pos-
svel traar uma linha e este coman-
do segue o mesmo princpio. Inicial-
mente, para apagar todas as figuras
da tela siga os comandos:
Command: erase
Select Objects: all
(D Enter)
Em seguida faa o seguinte:
Observao: Uma opo para interromper um comando utili-
zar a tecla esc. Para encerrar o comando pode-se tambm utilizar
o boto direito do mouse ao invs da tecla Enter no AutoCAD 14.
Este boto tambm serve para reativar o ltimo comando utiliza-
do. No AutoCAD 2000, ao se clicar o boto direito aparecer um
menu de atalhos para confirmar o Enter ou a repetio do ltimo
comando. Para quem no quiser perder tempo com este recurso
ele pode ser desconfigurado no menu superior em Tools, Options,
no guia Users Preferences e desative o check box Shortcut me-
nus in drawing area.
Command: line
LINE Specify first point: 0,0
Specify next point or [Undo]: 10,5
(D Enter)
Command: zoom
[ Al l / Cent er/ Dynami c/ Ext ent s/
Previ ous/ Scal e/ Wi ndow] <real
time>: all
Caso no tenha sido percebido,
uma reta foi traada do ponto 0,0 do
centro de coordenadas do AutoCAD
at o ponto 10,5. Se no for fcil de
ver a reta use o "zoom window" ex-
plicado anteriormente.
A segunda forma de traar linhas
o que chamamos de coordenas
polares, onde, sero utilizados o com-
primento e o ngulo da linha a ser
traada em relao ao eixo x. Apa-
gue a linha feita anteriormente e siga
estes comandos:
Command: line
LINE Specify first point: 0,0
Specify next point or [Undo]:
@100<30
(D Enter)
Neste caso foi especificado que
a linha parte do ponto 0,0, possui um
comprimento de 100 unidades e for-
ma um ngulo de 30 em relao ao
eixo x dos eixos coordenados.
O terceiro modo de traar linhas
o mais importante. Por ele pode-
mos traar uma linha sem se impor-
tar sobre o ponto inicial. Esta forma
consiste em determinar um ponto de
incio qualquer (no necessrio
saber as coordenadas iniciais) e em
seguida informar o quanto ela deslo-
ca em relao ao eixo x e em rela-
o ao eixo y. Veja este exemplo:
SOFTWARE
32 MECATRNICA FCIL N1/OUTUBRO-NOVEMBRO/2001
Figura 17 Exerccio 2.
Command: l
LINE Specify first point: 0,0
Specify next point or [Undo]: 100,0 (Coordenadas absolutas)
Specify next point or [Undo]: 100,50(Coordenadas absolutas)
Specify next point or [Close/Undo]: (D Enter)
Command: z (Comando para zoom)
ZOOM
Specify corner of window, enter a scale factor (nX or nXP), or
[All/Center/Dynamic/Extents/Previous/Scale/Window] <real time>: all
Command: l
LINE Specify first point: 100,50
Specify next point or [Undo]: @-50,0 (Coordenadas relativas)
Specify next point or [Undo]: @0,50(Coordenadas relativas)
Specify next point or [Close/Undo]: @50<180 (Coordenadas polares)
Specify next point or [Close/Undo]: @100<-90 (Coordenadas polares)
Specify next point or [Close/Undo]: (D Enter)
Figura 14 Segundo modo de traar linhas.
Figura 15 Terceiro modo de traar linhas.
Figura 16 Exerccio1.
Command: line
LINE Specify first point: (Clique
em qualquer ponto da tela)
Specify next point or [Undo]:
@50,100
(D Enter)
Para praticar, vamos fazer um desenho simples para treinar os coman-
dos vistos at agora, inclusive os trs mtodos de traar linhas.
Finalizando, tente praticar o que voc aprendeu com o exerccio abai-
xo. Use o mtodo de coordenadas absolutas e, principalmente, o de coorde-
nadas relativas para agilizar. At a prxima. l
Você também pode gostar
- (Apostila) Robótica Estudo de Peças e ComponentesDocumento62 páginas(Apostila) Robótica Estudo de Peças e ComponentesEduardo Bandeira100% (1)
- Guia de RoboticaDocumento16 páginasGuia de Roboticathethe3670Ainda não há avaliações
- Aula PLD 14 270911Documento40 páginasAula PLD 14 270911Thaylane NogueiraAinda não há avaliações
- Catalogo-Eletrico BR PDFDocumento84 páginasCatalogo-Eletrico BR PDFTiago SouzaAinda não há avaliações
- Eletricidade CapacitoresDocumento22 páginasEletricidade CapacitoresVanderlan DantasAinda não há avaliações
- Módulo 2 Componentes e Circuitos Elétricos-Eletrônicos Utilizados Na Refrigeração ResidencialDocumento59 páginasMódulo 2 Componentes e Circuitos Elétricos-Eletrônicos Utilizados Na Refrigeração ResidencialPra Zuar Silk Screen Confecção100% (1)
- Apresentacao Seminário NR16Documento20 páginasApresentacao Seminário NR16Leandro Pereira CarneiroAinda não há avaliações
- 2021 MundoRobotica v8n19Documento22 páginas2021 MundoRobotica v8n19CHRISTIANE MARTINSAinda não há avaliações
- Programação Em C E Assembly Para A Família Mc68hc908No EverandProgramação Em C E Assembly Para A Família Mc68hc908Ainda não há avaliações
- AULA 01 Introducao Robótica Renata MercanteDocumento54 páginasAULA 01 Introducao Robótica Renata MercanteWilliam TollerAinda não há avaliações
- GMDocumento85 páginasGMThomas Fensterseifer100% (2)
- Instrumentação Industrial SamarDocumento18 páginasInstrumentação Industrial SamarLuciano MagalhãesAinda não há avaliações
- Antologia De Projetos No Arduino Com Display Lcd Volume VNo EverandAntologia De Projetos No Arduino Com Display Lcd Volume VAinda não há avaliações
- Programação Em Assembly Para O Microcontrolador Pic12f Volume INo EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume INota: 5 de 5 estrelas5/5 (1)
- Porjeto Forno Fusao Metais InducaoDocumento60 páginasPorjeto Forno Fusao Metais InducaoFabiano SchincariolAinda não há avaliações
- Manutenção Do Sistema de Freio AutomotivoDocumento3 páginasManutenção Do Sistema de Freio AutomotivoFabricio LimaAinda não há avaliações
- Programação Em Assembly Para O Microcontrolador Pic18f Volume INo EverandProgramação Em Assembly Para O Microcontrolador Pic18f Volume IAinda não há avaliações
- Sistema de Medidas e ControlesDocumento54 páginasSistema de Medidas e ControlesLucia RyensoAinda não há avaliações
- Livro de Assembly GratuitoDocumento72 páginasLivro de Assembly GratuitoGlasington Bertolacio100% (1)
- R620 La6x4 RBP835+RP835 289289Documento4 páginasR620 La6x4 RBP835+RP835 289289Jorge AlbertoAinda não há avaliações
- Apostila PythonDocumento75 páginasApostila Pythonstephanie100% (1)
- Check List 2016 SmartphonesDocumento1 páginaCheck List 2016 SmartphonesniltoncesAinda não há avaliações
- Elementos de M+íquinas 2009Documento132 páginasElementos de M+íquinas 2009matheus davidAinda não há avaliações
- Mudras Gestos SagradosDocumento28 páginasMudras Gestos SagradosMarcelo Fernandes100% (3)
- Sistemas Supervisórios: Controladores Lógicos Programáveis (CLP)Documento52 páginasSistemas Supervisórios: Controladores Lógicos Programáveis (CLP)Maria Aline GonçalvesAinda não há avaliações
- Automação Do Processo de Rebarbamento de Peças em Máquinas de Moldagem de Plástico Por SoproDocumento80 páginasAutomação Do Processo de Rebarbamento de Peças em Máquinas de Moldagem de Plástico Por SoproDiego PiresAinda não há avaliações
- Noções de Recuperação SuplementarDocumento122 páginasNoções de Recuperação SuplementarSilvio Eduardo Teixeira50% (2)
- Apostila de Programação de PICs em C e ProteusDocumento40 páginasApostila de Programação de PICs em C e ProteusAndreia Rocha Amorim100% (1)
- Tabela de Vapor Saturado: Pressão Absoluta KGF/CMDocumento1 páginaTabela de Vapor Saturado: Pressão Absoluta KGF/CMTecnologiaemCAD100% (1)
- 08 Apostila Eletrogate - Kit Arduino Robo WiFiDocumento37 páginas08 Apostila Eletrogate - Kit Arduino Robo WiFiEldglay Da Silva DomingosAinda não há avaliações
- SkyORB - Manual de Instalação e UsoDocumento35 páginasSkyORB - Manual de Instalação e UsoJefferson NavarroAinda não há avaliações
- Manual Multec 700 DashboardDocumento11 páginasManual Multec 700 DashboardVitor100% (2)
- Aula 03 - Acionamentos EletroeletrônicosDocumento9 páginasAula 03 - Acionamentos EletroeletrônicosWAGNER RODRIGUES DE ABREUAinda não há avaliações
- Fundamentos de EletrônicaDocumento110 páginasFundamentos de Eletrônicamoacirfr5119100% (1)
- Tutorial RobotStudio 1 PT PDFDocumento45 páginasTutorial RobotStudio 1 PT PDFsergiorlimeiraAinda não há avaliações
- Resumo Hardware para ComputacaoDocumento22 páginasResumo Hardware para ComputacaoDouglas Basilio Dos SantosAinda não há avaliações
- LSD Acetatos 6 v2 PDFDocumento69 páginasLSD Acetatos 6 v2 PDFabednegoAinda não há avaliações
- PT DT PDN 03 14 014 PDFDocumento122 páginasPT DT PDN 03 14 014 PDFJean CandeiaAinda não há avaliações
- SENAI - Robótica IndustrialDocumento9 páginasSENAI - Robótica IndustrialsidbomAinda não há avaliações
- Arduino - Oximetro - 01Documento11 páginasArduino - Oximetro - 01Yvombek RebelloAinda não há avaliações
- 555 - Circuito IntegradoDocumento5 páginas555 - Circuito IntegradoGleison PrateadoAinda não há avaliações
- Apostila Robotica Educacional 4Documento38 páginasApostila Robotica Educacional 4Neive Ferreira CoelhoAinda não há avaliações
- Manual de Interpretação Esquemas EletricosDocumento7 páginasManual de Interpretação Esquemas EletricosHumberto Cadori FilhoAinda não há avaliações
- 0.967652001330085126 130 Eletronica DigitalDocumento155 páginas0.967652001330085126 130 Eletronica DigitalAline DiasAinda não há avaliações
- Futuro de CuritibaDocumento24 páginasFuturo de CuritibaRyuAinda não há avaliações
- Slide Editado MedidasDocumento38 páginasSlide Editado MedidasJane CardosoAinda não há avaliações
- Capítulo 3 - Autómatos ProgramáveisDocumento45 páginasCapítulo 3 - Autómatos ProgramáveisJoão Lourenço Cussondama100% (1)
- Aula 1 - Introdução Ao PLCDocumento53 páginasAula 1 - Introdução Ao PLCDouglas SantosAinda não há avaliações
- Atividade 2 Metodologias AgeisDocumento11 páginasAtividade 2 Metodologias AgeisBruna Thais0% (1)
- Apostila Circuitos Eletrônicos - LUIZ FERRAZ NETODocumento74 páginasApostila Circuitos Eletrônicos - LUIZ FERRAZ NETOlah.fisicaAinda não há avaliações
- Plano de Curso de SensorDocumento38 páginasPlano de Curso de SensorCarlos BraiaAinda não há avaliações
- Curso 66157 Aula 05 v1 PDFDocumento126 páginasCurso 66157 Aula 05 v1 PDFMarcus VeniciusAinda não há avaliações
- Matemática Aplicada À MecânicaDocumento9 páginasMatemática Aplicada À MecânicaAlfredo SoaresAinda não há avaliações
- CEPRA 13925 OM U5020 Ficha Exrecícios 1 ResolvidaDocumento5 páginasCEPRA 13925 OM U5020 Ficha Exrecícios 1 ResolvidaMariana CanastraAinda não há avaliações
- Apostila de Comandos ElétricosDocumento78 páginasApostila de Comandos ElétricosjptmoraisAinda não há avaliações
- Eletronica Na BancadaDocumento147 páginasEletronica Na Bancadaengenheiro_ecpAinda não há avaliações
- Projetos e TransceptoresDocumento3 páginasProjetos e TransceptoresAndréAinda não há avaliações
- Apostila - Eletronica Digital PDFDocumento52 páginasApostila - Eletronica Digital PDFDaniel Barbosa MotaAinda não há avaliações
- 7º Espanhol EditávelDocumento7 páginas7º Espanhol EditávelPriscila MoreiraAinda não há avaliações
- Como Criar Componentes No Software FritzingDocumento11 páginasComo Criar Componentes No Software FritzingAdir Figueiredo100% (1)
- Apostila Eletrônica DigitalDocumento5 páginasApostila Eletrônica DigitalZintels100% (1)
- Lista de Robótica IndustrialDocumento13 páginasLista de Robótica IndustrialAna Beatriz GandolfiAinda não há avaliações
- Memória Ram e Memória RomDocumento10 páginasMemória Ram e Memória RomMauricio MaraneAinda não há avaliações
- Desenvolvimento de Um Software para Obtenção Da Curva de Escoamento A Frio Através Do Ensaio de TraçãoDocumento9 páginasDesenvolvimento de Um Software para Obtenção Da Curva de Escoamento A Frio Através Do Ensaio de TraçãoMarcos TortiniAinda não há avaliações
- Teste F2Documento4 páginasTeste F2Olivia GomesAinda não há avaliações
- Revista Jubileu 27 Anos CrisopazioDocumento28 páginasRevista Jubileu 27 Anos CrisopaziolhvillaAinda não há avaliações
- Novo Cenario para PropelentesDocumento37 páginasNovo Cenario para PropelentesmarciojunkAinda não há avaliações
- Análise Experimental de Um Ar Condicionado Tipo Split Operando Com Os Gases Hidrocarbonetos Propano e Isobutano.Documento16 páginasAnálise Experimental de Um Ar Condicionado Tipo Split Operando Com Os Gases Hidrocarbonetos Propano e Isobutano.Eraldo SantosAinda não há avaliações
- TERMODINÂMICA QUÍMICA APLICADA - AULA - 2 - Conceitos Básicos Da TermodinâmicaDocumento17 páginasTERMODINÂMICA QUÍMICA APLICADA - AULA - 2 - Conceitos Básicos Da TermodinâmicaJamille Silva100% (1)
- W130 004 06 Fluidos e LubrificantesDocumento1 páginaW130 004 06 Fluidos e LubrificantesLevy LimaAinda não há avaliações
- Medidas de Vazão Através de Vertedores2015 PDFDocumento8 páginasMedidas de Vazão Através de Vertedores2015 PDFBruno DangeloAinda não há avaliações
- Codgo de Falhas Painel de Instrumentos Omega 1994Documento2 páginasCodgo de Falhas Painel de Instrumentos Omega 1994Cesa AugustoAinda não há avaliações
- Catálogo Itamonte 2020Documento126 páginasCatálogo Itamonte 2020Gustavo Luiz Ferreira SantosAinda não há avaliações
- 1 UanDocumento38 páginas1 UanIzabella TrapiaAinda não há avaliações
- Especificação Técnica Sistema de Proteção Com Relé Microprocessado Com Função 50-51 para Fase e Neutro - ET-03Documento18 páginasEspecificação Técnica Sistema de Proteção Com Relé Microprocessado Com Função 50-51 para Fase e Neutro - ET-03Adauto Jose PereiraAinda não há avaliações
- Estrutura MolecularDocumento6 páginasEstrutura Moleculardiegodrfg9664Ainda não há avaliações
- Fernandolourenco 1111118325582b3fd670908Documento83 páginasFernandolourenco 1111118325582b3fd670908Joaquim Monteiro100% (1)
- Acionamento de Motores ElétricosDocumento2 páginasAcionamento de Motores ElétricosÁureo Do Carmo MouraAinda não há avaliações
- Avaliação de Defeitos em Um Vaso de Pressão Utilizando A Api-579Documento28 páginasAvaliação de Defeitos em Um Vaso de Pressão Utilizando A Api-579Ruy Pontes100% (1)
- Forca de Tracao em Tratores Devido A Equipamentos AgricolasDocumento4 páginasForca de Tracao em Tratores Devido A Equipamentos AgricolasAndré Luiz NogueiraAinda não há avaliações