Você também pode gostar
- Aprese4 MultivibradoresDocumento23 páginasAprese4 Multivibradoresalan_smoAinda não há avaliações
- Aprese71 PLL Phase Locked LoopDocumento8 páginasAprese71 PLL Phase Locked Loopalan_smoAinda não há avaliações
- Aprese8 Conversor DADocumento29 páginasAprese8 Conversor DAalan_smoAinda não há avaliações
- Aprese8 Conversor DADocumento29 páginasAprese8 Conversor DAalan_smoAinda não há avaliações
- Apresentação 5 - Geradores de SinaisDocumento75 páginasApresentação 5 - Geradores de SinaisRenatoAlmeidaAinda não há avaliações
- Aprese81 Conversor ADDocumento26 páginasAprese81 Conversor ADalan_smoAinda não há avaliações
- Algoritmo D H PDFDocumento1 páginaAlgoritmo D H PDFalan_smoAinda não há avaliações
- Aplicacoes Especiais de Amplificadores Operacionais Vincence UdescDocumento0 páginaAplicacoes Especiais de Amplificadores Operacionais Vincence UdescleandroparkerAinda não há avaliações
- Aprese3 MoDemDocumento26 páginasAprese3 MoDemalan_smoAinda não há avaliações
- Gabarito PSC 2015 2Documento2 páginasGabarito PSC 2015 2alan_smoAinda não há avaliações
- Artigo Ace (Rev00)Documento3 páginasArtigo Ace (Rev00)alan_smoAinda não há avaliações
- Plano de Ensino AS2ROB1 2015 2Documento3 páginasPlano de Ensino AS2ROB1 2015 2alan_smoAinda não há avaliações
- Aprese2 MultiplicadoresDocumento12 páginasAprese2 Multiplicadoresalan_smoAinda não há avaliações
- Parametros DH PDFDocumento3 páginasParametros DH PDFalan_smoAinda não há avaliações
- Bônus - Avaliação 2Documento3 páginasBônus - Avaliação 2alan_smoAinda não há avaliações
- Tabela de Comandos MATLABDocumento4 páginasTabela de Comandos MATLABalan_smoAinda não há avaliações
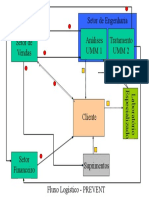
- Fluxo LogísticoDocumento1 páginaFluxo Logísticoalan_smoAinda não há avaliações
- Ace Av1 2016 2Documento3 páginasAce Av1 2016 2alan_smoAinda não há avaliações
- Aula 9Documento17 páginasAula 9alan_smoAinda não há avaliações
- Fluxo de EnergiaDocumento1 páginaFluxo de Energiaalan_smoAinda não há avaliações
- Gabarito Da 2 Prova 1Documento2 páginasGabarito Da 2 Prova 1alan_smoAinda não há avaliações
- Gabarito Da 2 Prova 1Documento2 páginasGabarito Da 2 Prova 1alan_smoAinda não há avaliações
- Ter Ce Ira ProvaDocumento2 páginasTer Ce Ira Provaalan_smoAinda não há avaliações
- Roteiro MCC v2Documento1 páginaRoteiro MCC v2alan_smoAinda não há avaliações
- Question Rio para ProvaDocumento8 páginasQuestion Rio para Provaalan_smoAinda não há avaliações
- Algoritmo D HDocumento1 páginaAlgoritmo D Halan_smoAinda não há avaliações
- MarketingVerde PDFDocumento18 páginasMarketingVerde PDFalan_smoAinda não há avaliações
- 20 Localizacao Espacial PDFDocumento50 páginas20 Localizacao Espacial PDFalan_smoAinda não há avaliações
- Parametros DHDocumento3 páginasParametros DHalan_smoAinda não há avaliações
- Ter Ce Ira ProvaDocumento2 páginasTer Ce Ira Provaalan_smoAinda não há avaliações
- Sinumerik CYCLE85 Mandrilamento 1Documento2 páginasSinumerik CYCLE85 Mandrilamento 1Lakisha SilvaAinda não há avaliações
- Antologia de Ficção Científica BrasileiraDocumento100 páginasAntologia de Ficção Científica BrasileiraHerman Augusto SchmitzAinda não há avaliações
- GeoMS ManualDocumento150 páginasGeoMS ManualbrunoAinda não há avaliações
- James Baldwin - GiovanniDocumento113 páginasJames Baldwin - Giovannielaine100% (3)
- 8 Ano Lista de Revisao Potencias162201014757Documento3 páginas8 Ano Lista de Revisao Potencias162201014757Adriano Carvalho100% (2)
- Espcex Lista 01 Mu Muv PDFDocumento3 páginasEspcex Lista 01 Mu Muv PDFRECRUTA COUTO100% (1)
- Rochas Ígneas Ou Magmáticas SlideDocumento21 páginasRochas Ígneas Ou Magmáticas SlideEmerson da GJAinda não há avaliações
- 01 - CartografiaDocumento11 páginas01 - CartografiaPlínio RibeiroAinda não há avaliações
- Relatorio Quimica Experimental 6 PDFDocumento8 páginasRelatorio Quimica Experimental 6 PDFReinaldo RodriguesAinda não há avaliações
- Novo Manual Liq System T - Email - Rev3Documento9 páginasNovo Manual Liq System T - Email - Rev3airon50% (2)
- M/120 - Produtos para Estruturas Metálicas: Não Deixe de LerDocumento4 páginasM/120 - Produtos para Estruturas Metálicas: Não Deixe de Lerfontes492Ainda não há avaliações
- Split BrastempDocumento73 páginasSplit Brastempevandro silva100% (1)
- Faculdade de Medicina Estácio de Juzeiro Do NorteDocumento9 páginasFaculdade de Medicina Estácio de Juzeiro Do NorteArtaniel LeinatraAinda não há avaliações
- Simulado Sobre Teoria Atômica Modelo Atômico de Dalton Thomson Rutherford Rutherford Bohr Concurso Professor de QuímicaDocumento4 páginasSimulado Sobre Teoria Atômica Modelo Atômico de Dalton Thomson Rutherford Rutherford Bohr Concurso Professor de QuímicaAnonymous aPzoIa4Ainda não há avaliações
- Catálogo RaychemDocumento5 páginasCatálogo RaychemNailtonPersilAinda não há avaliações
- Manual de Comunicação CAN Especial SCA06 ServiceDrive 19 3012 6360Documento19 páginasManual de Comunicação CAN Especial SCA06 ServiceDrive 19 3012 6360fito12Ainda não há avaliações
- Catalo GDocumento40 páginasCatalo GJosé AntunesAinda não há avaliações
- Proposta de Dimensionamento de Uma Área de Transbordo e TriagemDocumento12 páginasProposta de Dimensionamento de Uma Área de Transbordo e TriagemGabriel Romão Zan TaquettiAinda não há avaliações
- Relatório 2 - TecMec 2Documento9 páginasRelatório 2 - TecMec 2arthurpbdfAinda não há avaliações
- Catalogo Tanque Inter FibraDocumento27 páginasCatalogo Tanque Inter FibraRosemberg WagnerAinda não há avaliações
- 3M - Catálogo de Equipamentos Motorizados e de Ar AssistidoDocumento16 páginas3M - Catálogo de Equipamentos Motorizados e de Ar Assistidocfv2006Ainda não há avaliações
- Maquinas Elétricas de Polos SalientesDocumento10 páginasMaquinas Elétricas de Polos SalientesCaioGavaAinda não há avaliações
- Primeira Lista de Exercicios - Resistencia Dos MateriaisDocumento9 páginasPrimeira Lista de Exercicios - Resistencia Dos MateriaisScura18Ainda não há avaliações
- CN 5º Ano - Celula 1Documento2 páginasCN 5º Ano - Celula 1Marta do Nascimento100% (1)
- Operações Unitárias Na Indústria FarmacêuticaDocumento2 páginasOperações Unitárias Na Indústria FarmacêuticaJéssie SchöfferAinda não há avaliações
- A Arte de TraduzirDocumento10 páginasA Arte de TraduzirEscola Brasileira Psicanálise Ebp SpAinda não há avaliações
- Resumo de Sinais e SistemasDocumento27 páginasResumo de Sinais e SistemasDenys VianaAinda não há avaliações
- Tabua de DelinearDocumento3 páginasTabua de DelinearElmer Moisés Villacorta Revilla100% (1)
- Bombas CentrífugasDocumento207 páginasBombas CentrífugasDirceu Pereira Filho100% (2)
- Fluxograma Operações UnitariasDocumento3 páginasFluxograma Operações UnitariasCarollina marquesAinda não há avaliações
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Python e mercado financeiro: Programação para estudantes, investidores e analistasNo EverandPython e mercado financeiro: Programação para estudantes, investidores e analistasNota: 5 de 5 estrelas5/5 (3)
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Legislação De Segurança Do Trabalho: Textos SelecionadosNo EverandLegislação De Segurança Do Trabalho: Textos SelecionadosAinda não há avaliações
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Caixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasNo EverandCaixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasAinda não há avaliações
- IoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNo EverandIoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNota: 4 de 5 estrelas4/5 (2)
- React Native: Desenvolvimento de aplicativos mobile com ReactNo EverandReact Native: Desenvolvimento de aplicativos mobile com ReactNota: 5 de 5 estrelas5/5 (1)
- Análise de Dados para Negócios: Torne-se um Mestre em Análise de DadosNo EverandAnálise de Dados para Negócios: Torne-se um Mestre em Análise de DadosAinda não há avaliações