Você também pode gostar
- Equipe SuperBaja - Portfólio de Patrocínio 2011Documento9 páginasEquipe SuperBaja - Portfólio de Patrocínio 2011Luís Carlos SoaresAinda não há avaliações
- Testes de Validação Utilizado No Protótipo de Baja Na Equipe Carpoeira Baja SAEDocumento2 páginasTestes de Validação Utilizado No Protótipo de Baja Na Equipe Carpoeira Baja SAEAlexandre SantosAinda não há avaliações
- Plano de Patrocínio 2015-FEIDocumento9 páginasPlano de Patrocínio 2015-FEIEduardo Ataide de OliveiraAinda não há avaliações
- PAPER 8 - Estudo de Uma Transmissão CVT Destinada A BajaDocumento33 páginasPAPER 8 - Estudo de Uma Transmissão CVT Destinada A BajaLucasAinda não há avaliações
- Relatório Tufão 2012Documento9 páginasRelatório Tufão 2012Matheus NunesAinda não há avaliações
- Artigo - Adequação Na Ergonomia de Um Veiculo Off-RoadDocumento4 páginasArtigo - Adequação Na Ergonomia de Um Veiculo Off-RoadGustavo EhlertAinda não há avaliações
- Dimensionamento de Freio - BAJADocumento46 páginasDimensionamento de Freio - BAJAJoão Gabriel Machado100% (1)
- ADAMS/CAR para Equipes de Baja e Fórmula SAEDocumento1 páginaADAMS/CAR para Equipes de Baja e Fórmula SAERodrigo Bob100% (2)
- TCC Antonio DanielDocumento105 páginasTCC Antonio DanielGabriel CorreiaAinda não há avaliações
- Relatório Car-Kará - Carro 05 98ptsDocumento10 páginasRelatório Car-Kará - Carro 05 98ptsBiancaChavesAinda não há avaliações
- Relatório Baja SAE Nacional Competição de 2013Documento7 páginasRelatório Baja SAE Nacional Competição de 2013Walbert Santos100% (1)
- (FEI) Relatório Processo TIG - ResumoDocumento5 páginas(FEI) Relatório Processo TIG - ResumoNitt CasarottiAinda não há avaliações
- Estudo Básico de Uma Suspensão Do Tipo DUPLO A Com Ênfase para Um Veículo Mini BajaDocumento31 páginasEstudo Básico de Uma Suspensão Do Tipo DUPLO A Com Ênfase para Um Veículo Mini BajaJoao Guilherme Bezerra AlvesAinda não há avaliações
- Estudo Básico de Uma Suspensão Do Tipo DUPLO A Com Ênfase para Um Veículo Mini BajaDocumento31 páginasEstudo Básico de Uma Suspensão Do Tipo DUPLO A Com Ênfase para Um Veículo Mini BajaVinicius CostaAinda não há avaliações
- Fundamentos da Estampagem Incremental de Chapas Aplicados ao Aço AISI 304LNo EverandFundamentos da Estampagem Incremental de Chapas Aplicados ao Aço AISI 304LAinda não há avaliações
- Sistema de Resfriamento Da CVTDocumento15 páginasSistema de Resfriamento Da CVTLucas RosaAinda não há avaliações
- TCC - Projeto de Uma Suspensão de Um Fórmula SAE - Do Conceito Ao Cálculo de Fadiga - Mauricio Slovinscki MotterDocumento83 páginasTCC - Projeto de Uma Suspensão de Um Fórmula SAE - Do Conceito Ao Cálculo de Fadiga - Mauricio Slovinscki MotterAnonymous ZC1ld1CLmAinda não há avaliações
- Projeto Mandacaru Baja VelocidadeDocumento11 páginasProjeto Mandacaru Baja VelocidadeDiêgo MarcosAinda não há avaliações
- Análise Estrutural Quadro de BicicletaDocumento23 páginasAnálise Estrutural Quadro de BicicletaTonny SantosAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Dimensionamento Suspensão A para BajaDocumento64 páginasDimensionamento Suspensão A para BajaGabriel Di Palma100% (1)
- Projeto Organizacional Equipe Mangue BajaDocumento14 páginasProjeto Organizacional Equipe Mangue BajaPaulo Corrêa100% (1)
- Análise Do Semieixo HomocinéticoDocumento18 páginasAnálise Do Semieixo HomocinéticoLucasFreitasAinda não há avaliações
- Relatorio Bajaguara Mini Baja SAE UTFPR 2010Documento14 páginasRelatorio Bajaguara Mini Baja SAE UTFPR 2010CroisfeltAinda não há avaliações
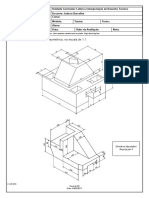
- Atividade Desenho TécnicoDocumento1 páginaAtividade Desenho TécnicoJudson Barcelos GonçalvesAinda não há avaliações
- 12 Calculando Engrenagens Cilindricas PDFDocumento10 páginas12 Calculando Engrenagens Cilindricas PDFishikawa norioAinda não há avaliações
- Relatório FMEA - FinalDocumento14 páginasRelatório FMEA - FinalAntonio BenícioAinda não há avaliações
- Banner FrenagemDocumento1 páginaBanner FrenagemEduardo JungesAinda não há avaliações
- Aplicação de Suspensão Duplo A em Veículos FSAE PDFDocumento25 páginasAplicação de Suspensão Duplo A em Veículos FSAE PDFGustavo BarbosaAinda não há avaliações
- Descritivos CAD-CAM NX 11Documento14 páginasDescritivos CAD-CAM NX 11Wendel TrentoAinda não há avaliações
- Sistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesNo EverandSistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesAinda não há avaliações
- Apostila CATIA - Part Design BásicoDocumento30 páginasApostila CATIA - Part Design BásicoMatheus MonjonAinda não há avaliações
- Aero Formula SaeDocumento148 páginasAero Formula SaeHenrique Carvalho Figueiredo da SilvaAinda não há avaliações
- Apostila de Solidworks (Português)Documento46 páginasApostila de Solidworks (Português)morph_euAinda não há avaliações
- Curso de AutoCAD 3D - Desenvolva Projetos 3D em CAD!Documento14 páginasCurso de AutoCAD 3D - Desenvolva Projetos 3D em CAD!Fábio FmsxAinda não há avaliações
- Apostila Inventor 2010 - Descrição Principais FerramentasDocumento28 páginasApostila Inventor 2010 - Descrição Principais Ferramentasclaudir89Ainda não há avaliações
- Projeto de Uma Caixa de Reducao Fixa para Veiculo Mini Baja Do IfpbDocumento122 páginasProjeto de Uma Caixa de Reducao Fixa para Veiculo Mini Baja Do IfpbCésar Miguéis100% (1)
- Estudo Sobre Suspensão Automotiva Focado em Veículos Off-RoadDocumento6 páginasEstudo Sobre Suspensão Automotiva Focado em Veículos Off-RoadsunaramelloAinda não há avaliações
- Usinagem - Folhas de ProcessoDocumento10 páginasUsinagem - Folhas de ProcessoWellington GhezziAinda não há avaliações
- PARAHYBAJA, 2013 Resumo Relatório - XIX Competição Baja SAEDocumento4 páginasPARAHYBAJA, 2013 Resumo Relatório - XIX Competição Baja SAEEdjan TomazAinda não há avaliações
- Analise Estrutural - BajaDocumento62 páginasAnalise Estrutural - BajaVicente Bergamini PugliaAinda não há avaliações
- Artigo UsinagemDocumento8 páginasArtigo UsinagemRenan Coswosk da SilvaAinda não há avaliações
- Apostila Senai-Bosch PDFDocumento111 páginasApostila Senai-Bosch PDFJosé Junior100% (3)
- Relatório BAJA SAEDocumento2 páginasRelatório BAJA SAERogério JuniorAinda não há avaliações
- Aula 16 - Pistão em 3D - SolidWorksDocumento36 páginasAula 16 - Pistão em 3D - SolidWorksjuditeAinda não há avaliações
- Relatório-Usinagem 2018Documento13 páginasRelatório-Usinagem 2018Pedro JúniorAinda não há avaliações
- Dimensionamento de Engrenagens Cônicas AGMADocumento8 páginasDimensionamento de Engrenagens Cônicas AGMAJeferson SilvaAinda não há avaliações
- 12 Apostila Inventor SenaiDocumento142 páginas12 Apostila Inventor SenaiIdeval Alves FilhoAinda não há avaliações
- Aula 5-Ensaio de TraçãoDocumento33 páginasAula 5-Ensaio de TraçãoLuiz Fernando Silva100% (1)
- Caderno de Exercícios Aluno FanucDocumento32 páginasCaderno de Exercícios Aluno Fanucabelmil123100% (1)
- Desenho de Maquinas 1 TeoriaDocumento52 páginasDesenho de Maquinas 1 TeoriaDkiogoAinda não há avaliações
- Manual Operação Plataofrma Genie Awp40s PortuguesDocumento2 páginasManual Operação Plataofrma Genie Awp40s PortuguesrodrigoaranhaAinda não há avaliações
- Programação CNC Torno e FresaDocumento2 páginasProgramação CNC Torno e FresavrjrAinda não há avaliações
- Jardim Ii 07 A 11 de Junho PDFDocumento5 páginasJardim Ii 07 A 11 de Junho PDFvalterlene asevedoAinda não há avaliações
- Concepções de Território para Entender A DesterritorializaçãoDocumento25 páginasConcepções de Território para Entender A DesterritorializaçãoMarcos Roberto Moura0% (1)
- FichamentoDocumento3 páginasFichamentoproa2008Ainda não há avaliações
- Premiados FEBRACE 2022 Parte1Documento27 páginasPremiados FEBRACE 2022 Parte1Lilia Rosane Leão SoaresAinda não há avaliações
- Carol LedDocumento9 páginasCarol Ledmariaparaiso9999Ainda não há avaliações
- Apresentação Rute Luzio, Definitiva PDFDocumento41 páginasApresentação Rute Luzio, Definitiva PDFSofia CoelhoAinda não há avaliações
- Casa Cor 2021 - Gisele TarantoDocumento74 páginasCasa Cor 2021 - Gisele TarantoGiseleAinda não há avaliações
- Ficha CadastralDocumento2 páginasFicha CadastralvictorAinda não há avaliações
- Lei Estadual de Incentivo À Cultura - ATO CTAP 21-2017 - Autorização de Captação - Edital 2017Documento122 páginasLei Estadual de Incentivo À Cultura - ATO CTAP 21-2017 - Autorização de Captação - Edital 2017andreAinda não há avaliações
- 1-Manual Centro de Usinagem Haas VF2-YT - 2012Documento263 páginas1-Manual Centro de Usinagem Haas VF2-YT - 2012SpaycophelsAinda não há avaliações
- Lista de Campo 2001Documento2 páginasLista de Campo 2001Guilherme LopesAinda não há avaliações
- Cópia de MAILLING RH ENVIO DE RELEASES SPDocumento12 páginasCópia de MAILLING RH ENVIO DE RELEASES SP9gfwffdtpkAinda não há avaliações
- Respostas Prontas para o Atendimento Ao ClienteDocumento7 páginasRespostas Prontas para o Atendimento Ao ClienteGilcimar BarrosAinda não há avaliações
- Equações Diferenciais HomogêneasDocumento3 páginasEquações Diferenciais HomogêneasAna SousaAinda não há avaliações
- PM Cesário Lange CP 1-2024 - Gabarito - Provas Aplicadas 24-Mar-2024Documento2 páginasPM Cesário Lange CP 1-2024 - Gabarito - Provas Aplicadas 24-Mar-2024andreproenca138Ainda não há avaliações
- Caterpillar 992Documento4 páginasCaterpillar 992Paulo Henrique de CarvalhoAinda não há avaliações
- Avaliação de Matemática: 4º Ano Do Ensino Fundamental 1 - 3º BimestreDocumento2 páginasAvaliação de Matemática: 4º Ano Do Ensino Fundamental 1 - 3º BimestreSamuel Alencar83% (64)
- Referente A Premiação Dos Alunos e Das Escolas Públicas Municipais e Ao Reconhecimento Dos Professores e Diretores Participantes DaDocumento5 páginasReferente A Premiação Dos Alunos e Das Escolas Públicas Municipais e Ao Reconhecimento Dos Professores e Diretores Participantes Daroneyduarte09Ainda não há avaliações
- TCC - O Shiatsu No Tratamento Da Doença de GravesDocumento3 páginasTCC - O Shiatsu No Tratamento Da Doença de GravesTalita SouzaAinda não há avaliações
- Ciclo Do Azoto - Comida de CoraisDocumento7 páginasCiclo Do Azoto - Comida de CoraisLuiz HenriqueAinda não há avaliações
- Lista de Vexercícios IDocumento3 páginasLista de Vexercícios Icarlos pontesAinda não há avaliações
- Trabalho 5Documento3 páginasTrabalho 5Gemerson Pereira SantosAinda não há avaliações
- SEI-RJ - Manual Do Usuário Avançado - 2.0Documento58 páginasSEI-RJ - Manual Do Usuário Avançado - 2.0maurinei nunesAinda não há avaliações
- 5.46 Esquema Toshiba VFS9 - Mono Rev 9Documento3 páginas5.46 Esquema Toshiba VFS9 - Mono Rev 9Rogerio Alves ResendeAinda não há avaliações
- Lista Antiguidade Primeiro GrauDocumento406 páginasLista Antiguidade Primeiro GrauDaniel Del CidAinda não há avaliações
- Pfsense Dual Wan Router 2Documento10 páginasPfsense Dual Wan Router 2João Antunes Lapa FilhoAinda não há avaliações
- Educação A Distância: Um Conceito A ErradicarDocumento185 páginasEducação A Distância: Um Conceito A ErradicarJoao Jose Saraiva da Fonseca86% (7)
- Planilha Orçamento Familiar - Ben Zruel - Mapa Da Prosperidade JudaicaDocumento24 páginasPlanilha Orçamento Familiar - Ben Zruel - Mapa Da Prosperidade JudaicaAntonio EpitacioAinda não há avaliações
- Prod Multimedia3Documento7 páginasProd Multimedia3patrick monteiroAinda não há avaliações
- Catalogo DigimessDocumento134 páginasCatalogo DigimessdandirealAinda não há avaliações