Você também pode gostar
- Método Monte Carlo de varredura de domínio (MCS)No EverandMétodo Monte Carlo de varredura de domínio (MCS)Ainda não há avaliações
- Problema Da MochilaDocumento14 páginasProblema Da MochilaRogério Ferreira BritoAinda não há avaliações
- Programação Matemática: Otimização Linear e Não LinearNo EverandProgramação Matemática: Otimização Linear e Não LinearAinda não há avaliações
- 4241 14309 1 PBDocumento5 páginas4241 14309 1 PBIdelvan RodriguesAinda não há avaliações
- C InvestigaçãoDocumento21 páginasC InvestigaçãoFirosa Emília CandrinhoAinda não há avaliações
- Minimizando Ramificações em Árvores GeradorasNo EverandMinimizando Ramificações em Árvores GeradorasAinda não há avaliações
- Introdução Aos Algoritmos Bioinspirados Nos Cursos de Graduação e Sua Aplicabilidade em Problemas de Alta Complexidade ComputacionalDocumento10 páginasIntrodução Aos Algoritmos Bioinspirados Nos Cursos de Graduação e Sua Aplicabilidade em Problemas de Alta Complexidade ComputacionalEuler SantanaAinda não há avaliações
- Erica Da Costa Reis CarvalhoDocumento14 páginasErica Da Costa Reis CarvalhoIdelvan RodriguesAinda não há avaliações
- Algoritmos Genético e Busca em Feixe Local para Problema da Mochila 0/1Documento4 páginasAlgoritmos Genético e Busca em Feixe Local para Problema da Mochila 0/1Alfredo ErdmannAinda não há avaliações
- ApostilaDocumento20 páginasApostilaalexramquiAinda não há avaliações
- Mochila Binária USPDocumento6 páginasMochila Binária USPfabiohxcxAinda não há avaliações
- Non-Dominated Sorting Algorithm II (NSGA-II) Aplicado Na Soluc Ao Do Problema Multiobjetivo Da MochilaDocumento7 páginasNon-Dominated Sorting Algorithm II (NSGA-II) Aplicado Na Soluc Ao Do Problema Multiobjetivo Da MochilaJoão MarquesAinda não há avaliações
- Classificação de Problemas P e NPDocumento26 páginasClassificação de Problemas P e NPluciliogomesAinda não há avaliações
- Otimização de lucros na produção e venda de máscaras de tecidoDocumento9 páginasOtimização de lucros na produção e venda de máscaras de tecidoFlora FelippiAinda não há avaliações
- ATPS_Pesquisa_OperacionalDocumento11 páginasATPS_Pesquisa_Operacionaljean.representacoes61Ainda não há avaliações
- Técnicas de Busca para Inteligência ArtificalDocumento24 páginasTécnicas de Busca para Inteligência ArtificalMaria cristina CortesAinda não há avaliações
- Monografia - Programação LinearDocumento59 páginasMonografia - Programação LinearRafael MendesAinda não há avaliações
- ATPS Pesquisa OperacionalDocumento18 páginasATPS Pesquisa Operacionaljean.representacoes61Ainda não há avaliações
- Otimização linear usando o método do grande MDocumento24 páginasOtimização linear usando o método do grande MDomingos Euro100% (3)
- Apostila GamsDocumento107 páginasApostila GamsFlávia Toporowicz100% (1)
- Introdução - Estudo e Análise de Desempenho de Algoritmos para Elevadores InteligentesDocumento4 páginasIntrodução - Estudo e Análise de Desempenho de Algoritmos para Elevadores Inteligentesthatazinha86Ainda não há avaliações
- Short PapeImplementação de Algoritmos de Busca Na Resolução Do Problema Do Empacotamento UnidimensionalrDocumento6 páginasShort PapeImplementação de Algoritmos de Busca Na Resolução Do Problema Do Empacotamento UnidimensionalrThiagoAinda não há avaliações
- PO: Programação Linear e ResoluçãoDocumento13 páginasPO: Programação Linear e ResoluçãoIstéfani RamalhoAinda não há avaliações
- Modelo MILP coleta RSU UEMDocumento11 páginasModelo MILP coleta RSU UEMThales Rossi SpartalisAinda não há avaliações
- ATPS Pesquisa OperacionalDocumento11 páginasATPS Pesquisa Operacionaljean.representacoes61Ainda não há avaliações
- EVENTO MétodoExatoOtimizarDocumento7 páginasEVENTO MétodoExatoOtimizarLeonardo VieiraAinda não há avaliações
- NP Completude - LoianeDocumento42 páginasNP Completude - LoianeLoiane Groner0% (1)
- Capítulo 3 - Técnicas de Busca HeurísticaDocumento27 páginasCapítulo 3 - Técnicas de Busca HeurísticaNatalia Sant' AnnaAinda não há avaliações
- Estudo Dirigido 1 - ProgramaçãoDocumento5 páginasEstudo Dirigido 1 - ProgramaçãoMurilo GallettiAinda não há avaliações
- Otimização em Sistemas de Transportes - Aula 7Documento24 páginasOtimização em Sistemas de Transportes - Aula 7diegoantoniogomes508Ainda não há avaliações
- Projeto Algoritmos Análise Ciclos GrafosDocumento6 páginasProjeto Algoritmos Análise Ciclos GrafosAlice CabralAinda não há avaliações
- Artigo SBPODocumento11 páginasArtigo SBPOniluxinhuAinda não há avaliações
- CapI-Programação LinearDocumento11 páginasCapI-Programação LinearGabriel CastroAinda não há avaliações
- Algoritmo Genético para Resolução Do Problema Do CaixeiroDocumento13 páginasAlgoritmo Genético para Resolução Do Problema Do CaixeirosgazoniAinda não há avaliações
- Introducao A Otimizacao Linear e AplicacoesDocumento1 páginaIntroducao A Otimizacao Linear e AplicacoesALEX Ferreira vieiraAinda não há avaliações
- Pesquisa Operacional: Introdução à Modelagem MatemáticaDocumento28 páginasPesquisa Operacional: Introdução à Modelagem MatemáticaLarissa TessariniAinda não há avaliações
- 02 - Algoritmos e Programação Estruturada - Programação Estruturada para DevDocumento97 páginas02 - Algoritmos e Programação Estruturada - Programação Estruturada para DevRoberto VilelaAinda não há avaliações
- Paradigmas de ProgramaçãoDocumento11 páginasParadigmas de ProgramaçãoSincero Zeferino FilhoAinda não há avaliações
- 4-Algoritmos e A Questão 5 Da IMO 2017 - Prof. Armando BarbosaDocumento13 páginas4-Algoritmos e A Questão 5 Da IMO 2017 - Prof. Armando BarbosaMike idkAinda não há avaliações
- PO DIEGO UN3 VDocumento23 páginasPO DIEGO UN3 VLuiz VinagreAinda não há avaliações
- Otimização de recursos limitados através da programação linearDocumento8 páginasOtimização de recursos limitados através da programação linearluis cassimooAinda não há avaliações
- Solução Produtor-Consumidor SemáforosDocumento7 páginasSolução Produtor-Consumidor SemáforosDiego SousaAinda não há avaliações
- Pesquisa Operacional Ativ 2Documento7 páginasPesquisa Operacional Ativ 2Julio CésarAinda não há avaliações
- Algoritmos gulosos para problemas de otimizaçãoDocumento53 páginasAlgoritmos gulosos para problemas de otimizaçãoAna Rita Valverde PerobaAinda não há avaliações
- Um Algoritmo Branch-And-Bound para o Problema de Programação de Projetos Com Custo de Disponibilidade de Recursos e Múltiplos ModosDocumento11 páginasUm Algoritmo Branch-And-Bound para o Problema de Programação de Projetos Com Custo de Disponibilidade de Recursos e Múltiplos ModosGeovane HenriqueAinda não há avaliações
- Pesquisa Operacional No Ambito Da LogisticaDocumento14 páginasPesquisa Operacional No Ambito Da LogisticafernandaassunAinda não há avaliações
- Algoritmos Dinâmicos e GulososDocumento5 páginasAlgoritmos Dinâmicos e GulososPedro DaviAinda não há avaliações
- STRAP - Manual Strap 2017 - MÓDULO SOLUÇÃODocumento7 páginasSTRAP - Manual Strap 2017 - MÓDULO SOLUÇÃOMarcos SouzaAinda não há avaliações
- RAP U1 S1 - Algoritmos e Lógica de ProgramaçãoDocumento5 páginasRAP U1 S1 - Algoritmos e Lógica de ProgramaçãoSarah SimõesAinda não há avaliações
- Socorro RangelDocumento63 páginasSocorro RangelFabricia Carla MoraisAinda não há avaliações
- InvestigacaoDocumento24 páginasInvestigacaoFirosa Emília CandrinhoAinda não há avaliações
- AGs em projetos de engenhariaDocumento11 páginasAGs em projetos de engenhariaSheila RoldãoAinda não há avaliações
- Programação por Metas na Resolução de Problemas MultiobjetivoDocumento16 páginasProgramação por Metas na Resolução de Problemas MultiobjetivoCássio AndradeAinda não há avaliações
- Complexidade de AlgoritmosDocumento21 páginasComplexidade de AlgoritmosEdinelson JuniorAinda não há avaliações
- Pesquisa Operacional IIDocumento24 páginasPesquisa Operacional IIMarcus SilvacostaAinda não há avaliações
- Introdução Algoritmos IADocumento3 páginasIntrodução Algoritmos IAAldo Aldrino Ail PiresAinda não há avaliações
- A 99 Line Topology Optimization Conde Written in MatlabDocumento10 páginasA 99 Line Topology Optimization Conde Written in MatlabzwmlyuewAinda não há avaliações
- Programação linear: maximizar lucro de montagem de lâmpadasDocumento7 páginasProgramação linear: maximizar lucro de montagem de lâmpadasWiliam Armando HarissoneAinda não há avaliações
- Problema da Mochila: Algoritmos de Força Bruta, Programação Dinâmica e AproximaçãoDocumento11 páginasProblema da Mochila: Algoritmos de Força Bruta, Programação Dinâmica e AproximaçãoElias SoaresAinda não há avaliações
- Gestao de Recursos Humanos Recrutamento e SelecaoDocumento36 páginasGestao de Recursos Humanos Recrutamento e SelecaoAnaySerra50% (2)
- Os 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoDocumento3 páginasOs 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoSílvio FonteneleAinda não há avaliações
- Matrizes Determinantes IIDocumento2 páginasMatrizes Determinantes IIRonaldo NdalaAinda não há avaliações
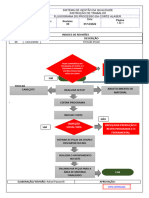
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Documento1 página10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliAinda não há avaliações
- SPOLIN, Viola - Jogos Teatrais - O Fichário de Viola Spolin PDFDocumento48 páginasSPOLIN, Viola - Jogos Teatrais - O Fichário de Viola Spolin PDFGilberta Nogueira100% (9)
- As Seis Lições - LivroDocumento21 páginasAs Seis Lições - LivroRonaldo AssisAinda não há avaliações
- Dívida pública em Moçambique: análise da sustentabilidade e implicações do acordo do Conselho ConstitucionalDocumento39 páginasDívida pública em Moçambique: análise da sustentabilidade e implicações do acordo do Conselho ConstitucionalErnesto Alvaro Mussa100% (1)
- Análise de Desempenho de Enlaces de Satélites de Alta CapacidadeDocumento26 páginasAnálise de Desempenho de Enlaces de Satélites de Alta CapacidadeAline MendonçaAinda não há avaliações
- Sensoriamento inteligente de transformadores para gestão de ativosDocumento8 páginasSensoriamento inteligente de transformadores para gestão de ativosSergioCarabetti100% (1)
- Codigos de Contas Do SNCDocumento8 páginasCodigos de Contas Do SNCAntónio Fernando FerreiraAinda não há avaliações
- Teste de Rotor BobinadoDocumento2 páginasTeste de Rotor BobinadoHipot ServiceAinda não há avaliações
- Instruções para realização de prova objetiva e discursivaDocumento19 páginasInstruções para realização de prova objetiva e discursivaJoao victor SameiroAinda não há avaliações
- Português Atividade 3 AnoDocumento27 páginasPortuguês Atividade 3 AnoeulerosilvaAinda não há avaliações
- Gestão Património EstadoDocumento50 páginasGestão Património Estadocassimo luis mundimoAinda não há avaliações
- Análise de tensões em vasos de pressão cilíndricos e esféricosDocumento42 páginasAnálise de tensões em vasos de pressão cilíndricos e esféricosJosé Roberto HonórioAinda não há avaliações
- Monografia JOSEDocumento45 páginasMonografia JOSENhawas Ernesto100% (2)
- MR Gyn MR Gyn Minha Juventude - Piano e Teclado - 1398866536Documento5 páginasMR Gyn MR Gyn Minha Juventude - Piano e Teclado - 1398866536Felipe CamargoAinda não há avaliações
- Modelo de Roteiro CERIMONIALDocumento2 páginasModelo de Roteiro CERIMONIALMayara Costa100% (1)
- Tratado Dos 256 Odus de Ifa Brasil 2 PDF FreeDocumento6 páginasTratado Dos 256 Odus de Ifa Brasil 2 PDF FreeWildslay RodriguesAinda não há avaliações
- Relações Econômicas InternacionaisDocumento3 páginasRelações Econômicas InternacionaisBrunaAinda não há avaliações
- GratidãoDocumento2 páginasGratidãocristinalang21Ainda não há avaliações
- O animal satisfeito dorme: alerta contra acomodação e estagnaçãoDocumento42 páginasO animal satisfeito dorme: alerta contra acomodação e estagnaçãoEmmy BortoletoAinda não há avaliações
- Softwares para TopografiaDocumento99 páginasSoftwares para TopografialauraAinda não há avaliações
- Apostila ENGEMAN - Modulo BásicoDocumento82 páginasApostila ENGEMAN - Modulo BásicoRoberto PriscilaAinda não há avaliações
- Seer,+Journal+Manager,+884 2263 1 CEDocumento20 páginasSeer,+Journal+Manager,+884 2263 1 CEJerônimo de Freitas RegisAinda não há avaliações
- Erros de percepção e tomada de decisãoDocumento3 páginasErros de percepção e tomada de decisãoYara Conceicao ConceicaoAinda não há avaliações
- Nattokinase: fibrinólise e saúde cardiovascularDocumento4 páginasNattokinase: fibrinólise e saúde cardiovascularSandro Rogério AlvaresAinda não há avaliações
- Diario Oficial 2022-01-10 CompletoDocumento94 páginasDiario Oficial 2022-01-10 CompletoDias de Visitas PSMA1Ainda não há avaliações
- Tratamento candidíase vaginalDocumento6 páginasTratamento candidíase vaginalDiana PereiraAinda não há avaliações
- Artes - MárciaDocumento5 páginasArtes - MárciaLeonardo PereiraAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Algoritmos em Java: Busca, ordenação e análiseNo EverandAlgoritmos em Java: Busca, ordenação e análiseNota: 5 de 5 estrelas5/5 (1)
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- JavaScript: Um Guia para Aprender a Linguagem de Programação JavaScriptNo EverandJavaScript: Um Guia para Aprender a Linguagem de Programação JavaScriptNota: 4.5 de 5 estrelas4.5/5 (4)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- Orientação a Objetos em C#: Conceitos e implementações em .NETNo EverandOrientação a Objetos em C#: Conceitos e implementações em .NETNota: 5 de 5 estrelas5/5 (1)