Você também pode gostar
- MECH019AF - Chicote UnificadoDocumento14 páginasMECH019AF - Chicote UnificadoNathalia MenezesAinda não há avaliações
- W bwm22100230pt-BR02Documento3 páginasW bwm22100230pt-BR02Antônio Augusto F. PereiraAinda não há avaliações
- LE3U ManualDocumento11 páginasLE3U Manualrogerio francisco silvaAinda não há avaliações
- 1C4NJCAA4CD677920 Relatório de Verificação Do VeículoDocumento2 páginas1C4NJCAA4CD677920 Relatório de Verificação Do VeículocarlosAinda não há avaliações
- LE3U-Manual en PTDocumento11 páginasLE3U-Manual en PTMelque OliveiraAinda não há avaliações
- Controlador ST2130Documento599 páginasControlador ST2130csorgo100% (15)
- Controle Geral de Rompimento de Corpos de Prova - FCK 10MPaDocumento3 páginasControle Geral de Rompimento de Corpos de Prova - FCK 10MPaLucas GasperinAinda não há avaliações
- Modelo Laudo Ruído Externo ATKANTICDocumento7 páginasModelo Laudo Ruído Externo ATKANTICAMILTONAinda não há avaliações
- DAF XF Xf105 27-04-2023 18-09Documento2 páginasDAF XF Xf105 27-04-2023 18-09mucusseteAinda não há avaliações
- Básico 6352Documento21 páginasBásico 6352XXXChitaoXXXAinda não há avaliações
- Panasonic TC-L32G11B LH88 PDFDocumento79 páginasPanasonic TC-L32G11B LH88 PDFMarcelo Do Nascimento CostaAinda não há avaliações
- Resultado 28 Dias - Moldagem 23-08-2023Documento1 páginaResultado 28 Dias - Moldagem 23-08-2023Wendel LealAinda não há avaliações
- PCM PDH SDHDocumento39 páginasPCM PDH SDHElton RibeiroAinda não há avaliações
- Mancats Diagnostic3557005688591748351Documento4 páginasMancats Diagnostic3557005688591748351Uellington AraújoAinda não há avaliações
- Ordens Tratadas 12.09.2022Documento5 páginasOrdens Tratadas 12.09.2022MANUTENÇÃO INDUSTRIALAinda não há avaliações
- Manual Do Usuário: Speed Dome CL Combat 27Documento25 páginasManual Do Usuário: Speed Dome CL Combat 27guilhermeAinda não há avaliações
- DCC PortDocumento48 páginasDCC PortAndré dos Santos Gama GamaAinda não há avaliações
- Diagnóstico de Falhas Inicio Red 1 PDFDocumento24 páginasDiagnóstico de Falhas Inicio Red 1 PDFLeoSilva100% (4)
- Treinamento de E1Documento32 páginasTreinamento de E1DiogoSobreiraAinda não há avaliações
- Servicos DetranDocumento1 páginaServicos DetranHeloisio JrAinda não há avaliações
- TRADUZINDODocumento11 páginasTRADUZINDOMelque OliveiraAinda não há avaliações
- Manual de Campo MX GC PTDocumento113 páginasManual de Campo MX GC PTAranhas AranhasAinda não há avaliações
- 21 - A4 FT 21 1822752000100401000000 QRM 03 Rev 1 2 Ok PDFDocumento2 páginas21 - A4 FT 21 1822752000100401000000 QRM 03 Rev 1 2 Ok PDFalexandreAinda não há avaliações
- Manual KN-200#500#2000#4000#5000#8000#15 Rev04 PDFDocumento16 páginasManual KN-200#500#2000#4000#5000#8000#15 Rev04 PDFdiegobode0% (2)
- Resultado 28 Dias - Moldagem 01-09-2023Documento1 páginaResultado 28 Dias - Moldagem 01-09-2023Wendel LealAinda não há avaliações
- Parte Diária - Movimentação Inetrna VC CSPDocumento1 páginaParte Diária - Movimentação Inetrna VC CSPMarcos MoraisAinda não há avaliações
- Diagrama Elétrico Painel CCMDocumento49 páginasDiagrama Elétrico Painel CCMAdson BrunoAinda não há avaliações
- Arquivo 2 - Treinamento - Plataforma - DWDM - TelemarDocumento66 páginasArquivo 2 - Treinamento - Plataforma - DWDM - TelemarAlberto CassianoAinda não há avaliações
- 15 Spda-11-.22Documento8 páginas15 Spda-11-.22Alexandre GuerraAinda não há avaliações
- Telefonia - e - PDH 1Documento50 páginasTelefonia - e - PDH 1Elielton SilvaAinda não há avaliações
- EDP - DRE Tecnologias de Electrificação - Instalações AT e MT Subestaçãoes de DistribuiçãoDocumento7 páginasEDP - DRE Tecnologias de Electrificação - Instalações AT e MT Subestaçãoes de DistribuiçãoiamlpAinda não há avaliações
- Servico National Tc-209 Chassi b31Documento11 páginasServico National Tc-209 Chassi b31Oscar Arthur KoepkeAinda não há avaliações
- Teste PCI 12 Derivações 2 PDFDocumento15 páginasTeste PCI 12 Derivações 2 PDFMarcelo PriebeAinda não há avaliações
- COBAN - Manual - TKsDocumento18 páginasCOBAN - Manual - TKsO_NOLAAinda não há avaliações
- 11.voltenax Cobre 1kVDocumento2 páginas11.voltenax Cobre 1kVMirtão DomingosAinda não há avaliações
- 21 - A4 FT QRM 01 1 822 860001 00 401000 0000 Rev 00 OkDocumento2 páginas21 - A4 FT QRM 01 1 822 860001 00 401000 0000 Rev 00 OkalexandreAinda não há avaliações
- Pedro Oliveira - CPTM PDFDocumento56 páginasPedro Oliveira - CPTM PDFMarcus Vinícius de PaivaAinda não há avaliações
- UD II - Emprego Da PÇ MRT (C)Documento32 páginasUD II - Emprego Da PÇ MRT (C)Cauê SuarezAinda não há avaliações
- Apostila Transdutores PremiumDocumento49 páginasApostila Transdutores PremiumTiago Da Silva Machado100% (1)
- Teste Inspeção SPO2 PDFDocumento4 páginasTeste Inspeção SPO2 PDFMarcelo PriebeAinda não há avaliações
- Tabela Hidraulica Famac XKMDocumento1 páginaTabela Hidraulica Famac XKMNelson faustusAinda não há avaliações
- 07 ChecDocumento40 páginas07 ChecRafael Dutil LucianaAinda não há avaliações
- Manual C304, C404, C407, C409 ViewDocumento20 páginasManual C304, C404, C407, C409 ViewMarcus ViniciusAinda não há avaliações
- Ruptura Dos CPSDocumento3 páginasRuptura Dos CPSadilson ribeiroAinda não há avaliações
- RUPTURA DOS CPS AfiliadosjsDocumento3 páginasRUPTURA DOS CPS AfiliadosjsFabiano Caldas DoimAinda não há avaliações
- 988675118NKL09207 Scan Report Do VeículoDocumento3 páginas988675118NKL09207 Scan Report Do VeículoLuan MagalAinda não há avaliações
- SCA05Documento20 páginasSCA05rrebollarAinda não há avaliações
- 11.voltenax Cobre 1kV PDFDocumento3 páginas11.voltenax Cobre 1kV PDFricardoAinda não há avaliações
- 11.voltenax Cobre 1kVDocumento5 páginas11.voltenax Cobre 1kVMirtão DomingosAinda não há avaliações
- DF 2020KS M 00505 J 00054 - Rev - 0Documento2 páginasDF 2020KS M 00505 J 00054 - Rev - 0Wellington VieiraAinda não há avaliações
- K1200 Remote Control Control Remoto K1200 Controle Remoto K1200Documento29 páginasK1200 Remote Control Control Remoto K1200 Controle Remoto K1200João Paulo FornelAinda não há avaliações
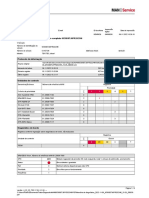
- PDCC Fichatécnica v04Documento4 páginasPDCC Fichatécnica v04daniel costandradeAinda não há avaliações
- 1.4b-IE-Proteção Sobrecorrentes - DisjuntoresDocumento93 páginas1.4b-IE-Proteção Sobrecorrentes - DisjuntoresHugo ViniciusAinda não há avaliações
- HP Nz2 REV F 0915Documento41 páginasHP Nz2 REV F 0915rmartins_239474100% (2)
- FM 21339 - 5.096 - LV Caminhão BasculanteDocumento1 páginaFM 21339 - 5.096 - LV Caminhão BasculanteSMS GERALAinda não há avaliações
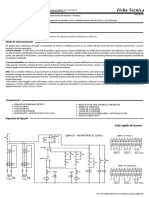
- COMANDO AUTOMÁTICO PARA DUAS BOMBAS21 - QRMDocumento1 páginaCOMANDO AUTOMÁTICO PARA DUAS BOMBAS21 - QRMLeonardo FerreiraAinda não há avaliações
- 2019 Ka Componentes Controle MotorDocumento33 páginas2019 Ka Componentes Controle Motorassismarquesjunior96Ainda não há avaliações
- Medindo O Valor De Pico Para Uma Medição De Dinamômetro Programado No PicNo EverandMedindo O Valor De Pico Para Uma Medição De Dinamômetro Programado No PicAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Dinamômetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Dinamômetro Com PicAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Termômetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Termômetro Com PicAinda não há avaliações
- Esportes de Rede e Quadra DivididaDocumento2 páginasEsportes de Rede e Quadra DivididaQueli RitterAinda não há avaliações
- Atividade de Portugues 4 Unidade 8B AnoDocumento17 páginasAtividade de Portugues 4 Unidade 8B AnoIracema SantosAinda não há avaliações
- Introdução À Estatística: Segundo Semestre/2018Documento14 páginasIntrodução À Estatística: Segundo Semestre/2018Dyonathan DutraAinda não há avaliações
- Mine Projeto FolcloreDocumento12 páginasMine Projeto FolcloreCarlos Art Silva100% (1)
- Entrevista MotivacionalDocumento27 páginasEntrevista MotivacionalPAULOAinda não há avaliações
- Planos de Treino Mariana EstevesDocumento5 páginasPlanos de Treino Mariana EstevesMariana CostaAinda não há avaliações
- Acordao-2018 1826732Documento26 páginasAcordao-2018 1826732Sciola SciolaAinda não há avaliações
- Modelo de Trabalho UnoparDocumento12 páginasModelo de Trabalho UnoparDaniel MastersAinda não há avaliações
- Introdução Mito X ContramitoDocumento4 páginasIntrodução Mito X ContramitomarcioAinda não há avaliações
- ResumoLusiadas AdamastorDocumento1 páginaResumoLusiadas AdamastorAntonioAinda não há avaliações
- Pop Cti PN Ucp - 019 Manuseio Da IncubadoraDocumento11 páginasPop Cti PN Ucp - 019 Manuseio Da IncubadoraAdiane Nepel FernandesAinda não há avaliações
- Degermação Das MãosDocumento3 páginasDegermação Das MãosRoberio Gleydson cosme Silva100% (1)
- Projeto IES - Brasil 2050Documento69 páginasProjeto IES - Brasil 2050Wiliam RomanholiAinda não há avaliações
- Amputação Traumática e Lesões Graves de Membros Superiores: Traumatic Amputation and Severe Upper Limbs InjuriesDocumento4 páginasAmputação Traumática e Lesões Graves de Membros Superiores: Traumatic Amputation and Severe Upper Limbs InjuriesRaquel BAinda não há avaliações
- Diario Am 2023-10-03 CompletoDocumento42 páginasDiario Am 2023-10-03 Completoaspedam.pcdAinda não há avaliações
- Ebook Bolo No PoteDocumento20 páginasEbook Bolo No PoteagneshumphreisAinda não há avaliações
- Separação de Bens PessoasDocumento5 páginasSeparação de Bens PessoasEdna AmadoAinda não há avaliações
- Avaliacao Final - Matematica AplicadaDocumento5 páginasAvaliacao Final - Matematica AplicadaRobleson GualbertoAinda não há avaliações
- Manual Motor Garen PivotanteDocumento6 páginasManual Motor Garen PivotanteAllan CostaAinda não há avaliações
- Anestesia e Doenças Incomuns CoexistentesDocumento221 páginasAnestesia e Doenças Incomuns CoexistentesC RAinda não há avaliações
- Apometria Quântica - Carina GrecoDocumento69 páginasApometria Quântica - Carina Grecoteresa0cristina0mara100% (3)
- Calculo Dormitorio 2Documento9 páginasCalculo Dormitorio 2Zacarias Mellado AyalaAinda não há avaliações
- Fichadeseguranca AFQCPBOXDocumento15 páginasFichadeseguranca AFQCPBOXQuality RHAinda não há avaliações
- Plano de Ensino - Geografia 2º AnoDocumento7 páginasPlano de Ensino - Geografia 2º AnoNatália MorenaAinda não há avaliações
- Stengers - Resisitir A SimondonDocumento7 páginasStengers - Resisitir A SimondonVladimirAinda não há avaliações
- Observe As Imagens A Seguir e Leia As LegendasDocumento24 páginasObserve As Imagens A Seguir e Leia As LegendasJusci LombardiAinda não há avaliações
- (Rotina Pedagogica 2024) 3 4 5 AnosDocumento9 páginas(Rotina Pedagogica 2024) 3 4 5 AnosEdna SouzaAinda não há avaliações
- Divisão em CircuitosDocumento22 páginasDivisão em CircuitosJessicaAinda não há avaliações
- Capas de Cadernos COLORIDASDocumento84 páginasCapas de Cadernos COLORIDASclaralopes174Ainda não há avaliações
- Resolução de Questoes de CinematicaDocumento25 páginasResolução de Questoes de CinematicaRobson FelixAinda não há avaliações