Você também pode gostar
- 08 Tol - DimensionalDocumento54 páginas08 Tol - Dimensionalhugod1982Ainda não há avaliações
- Aula 6 - Tol - Dim (Modo de CompatibilidadeDocumento8 páginasAula 6 - Tol - Dim (Modo de CompatibilidadeSharp100% (1)
- Desenho Tecnico Moderno Cap 10Documento10 páginasDesenho Tecnico Moderno Cap 10Lucas MarceloAinda não há avaliações
- Apostila Parte II MetrologiaDocumento169 páginasApostila Parte II Metrologiacris200306Ainda não há avaliações
- Implementando Um Soft-starter Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- Seminário4 - Tolerancias e AjustesDocumento60 páginasSeminário4 - Tolerancias e AjustesRegi NasattoAinda não há avaliações
- 07 Tol - Dimensiona 449093779ea82Documento43 páginas07 Tol - Dimensiona 449093779ea82Felicia AugustoAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Tolerância Dimensional (SENAI) PDFDocumento25 páginasTolerância Dimensional (SENAI) PDFUILSONJR100% (2)
- Implementando Um Conversor Mono->tri Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Conversor Mono->tri Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- RelatórioDocumento34 páginasRelatóriogabyr3805Ainda não há avaliações
- Implementando Um Soft-starter Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Teórica 2 - Tolerância Dimensional EIXODocumento43 páginasTeórica 2 - Tolerância Dimensional EIXORogerAinda não há avaliações
- Catalogo Toolflex Uptech BrasilDocumento1 páginaCatalogo Toolflex Uptech BrasilcvfAinda não há avaliações
- Furadeira de BancadaDocumento41 páginasFuradeira de BancadaDouglas Gadotti80% (5)
- Apostila Metrologia 1 PDFDocumento20 páginasApostila Metrologia 1 PDFRoni Marcos OliveiraAinda não há avaliações
- Catalogo AEDocumento8 páginasCatalogo AEarmusoAinda não há avaliações
- Steel Deck MFDocumento4 páginasSteel Deck MFLimar SetatraAinda não há avaliações
- Tubos EstruturaisDocumento47 páginasTubos EstruturaisIsmael AmarchandeAinda não há avaliações
- Relatório Pratico de Estrutura de AçoDocumento10 páginasRelatório Pratico de Estrutura de AçoIkaro PinheiroAinda não há avaliações
- EN 10058-2003-Extracto - Tolerancias Barras RectangularesDocumento2 páginasEN 10058-2003-Extracto - Tolerancias Barras RectangularesQualidadeTFAinda não há avaliações
- Desenho Tecnico Normas de Tolerância e AjusteDocumento9 páginasDesenho Tecnico Normas de Tolerância e AjusteDouglas Gomes100% (19)
- Apontamentos Sistema de Tolerancia e AjustamentoDocumento14 páginasApontamentos Sistema de Tolerancia e AjustamentoaristidesAinda não há avaliações
- Acoplamentos CompogearDocumento1 páginaAcoplamentos Compogeareng.rsmartinsAinda não há avaliações
- Catalogo Retentores 2013 PDFDocumento123 páginasCatalogo Retentores 2013 PDFAdemilson RangelvieiraAinda não há avaliações
- Tabel AsDocumento29 páginasTabel AsaspoletoAinda não há avaliações
- Tole Ran CIA Dimensional ETE Fernando PrestesDocumento18 páginasTole Ran CIA Dimensional ETE Fernando PrestesLucasZanaAinda não há avaliações
- R210Documento618 páginasR210Mariê Ferreira Júnior100% (6)
- Apostila Metrologia Engenharia UnipDocumento20 páginasApostila Metrologia Engenharia UnipLucca CinquarolliAinda não há avaliações
- Arquivo 2Documento19 páginasArquivo 2josileneobbAinda não há avaliações
- Ajustes e ToleranciasDocumento29 páginasAjustes e ToleranciasElenildo BastosAinda não há avaliações
- Norma TÉCNICA NBR 5590 (TUBO GROOVED)Documento7 páginasNorma TÉCNICA NBR 5590 (TUBO GROOVED)grupoconfido007Ainda não há avaliações
- Desenho Técnico 05Documento15 páginasDesenho Técnico 05Girlan MedeirosAinda não há avaliações
- Tabela-Aço CA-50Documento2 páginasTabela-Aço CA-50ScheitinhoAinda não há avaliações
- Sobremetal Usinagem VillaresDocumento1 páginaSobremetal Usinagem VillaresWilson De VulcanisAinda não há avaliações
- Tolerancia para ChapasDocumento4 páginasTolerancia para Chapasjean vieiraAinda não há avaliações
- Catalogo PRYSUN - CompletoDocumento6 páginasCatalogo PRYSUN - CompletoEverton Borges de SouzaAinda não há avaliações
- Apostila de Metrologia 3 ParteDocumento34 páginasApostila de Metrologia 3 Partedanosdcno0% (1)
- Usinagem Aula 2Documento22 páginasUsinagem Aula 2Pedro RangelAinda não há avaliações
- Exemplos de AplicaçãoDocumento26 páginasExemplos de AplicaçãoLeonam FariasAinda não há avaliações
- UCR1 - Fundamentos - Mecanica - SA1 - Interpretacao - Peca 1 - WagnerDocumento6 páginasUCR1 - Fundamentos - Mecanica - SA1 - Interpretacao - Peca 1 - WagnerMaria ClaraAinda não há avaliações
- Tolerâncias DimensionaisDocumento22 páginasTolerâncias DimensionaisAndre ThiagoAinda não há avaliações
- PoliasDocumento13 páginasPoliasSebastião Barbosa da SilvaAinda não há avaliações
- Semana 8 - Tolerância DimensionalDocumento6 páginasSemana 8 - Tolerância DimensionalLeandro CorráAinda não há avaliações
- RelatórioDocumento14 páginasRelatórioLucas SantosAinda não há avaliações
- Anel HB 7014Documento3 páginasAnel HB 7014llobermayer1Ainda não há avaliações
- Estruturas Metálicas - TraçãoDocumento33 páginasEstruturas Metálicas - TraçãoLeopoldo CoutoAinda não há avaliações
- CatalogoprotendeDocumento36 páginasCatalogoprotendePedro PereiraAinda não há avaliações
- Din - 7168Documento7 páginasDin - 7168Vitor BiesseAinda não há avaliações
- Tolerâncias Dimensionais em Desenho TécnicoDocumento4 páginasTolerâncias Dimensionais em Desenho TécnicoHelorah13Ainda não há avaliações
- Transmissao Por Correntes de RolosDocumento16 páginasTransmissao Por Correntes de RolosSoraia SandesAinda não há avaliações
- Tabela Do EletricistaDocumento2 páginasTabela Do EletricistarenatoAinda não há avaliações
- Sistema de Tolerâncias e AjustesDocumento13 páginasSistema de Tolerâncias e AjustesLuciano Charles SantanaAinda não há avaliações
- ToleranciaDocumento14 páginasToleranciaKalenin de MoraesAinda não há avaliações
- Relatório de Análise de Tensão PDFDocumento34 páginasRelatório de Análise de Tensão PDFMorce Victor SilvaAinda não há avaliações
- Questionario de ReologiaDocumento4 páginasQuestionario de ReologiaNei Rodrigues de FreitasAinda não há avaliações
- Análise Não-Linear de Pórticos Planos de Concreto Armado Modelagem Numérica e Avaliação Dos Métodos AproximadosDocumento289 páginasAnálise Não-Linear de Pórticos Planos de Concreto Armado Modelagem Numérica e Avaliação Dos Métodos AproximadosAnax SouzaAinda não há avaliações
- 2 - Propriedades - Citc Abr2023Documento97 páginas2 - Propriedades - Citc Abr2023evertonpaiva2019Ainda não há avaliações
- O Aço Na Construção CivilDocumento6 páginasO Aço Na Construção CivilMarcos PangananheAinda não há avaliações
- Cálculo de Lajes TreliçadasDocumento11 páginasCálculo de Lajes TreliçadasLgSalgadoAinda não há avaliações
- Trabalho Compressão Clarisse ChadesDocumento30 páginasTrabalho Compressão Clarisse Chadesclarisse.pinheiroAinda não há avaliações
- MCC - Prof. Sérgio W. FDocumento25 páginasMCC - Prof. Sérgio W. FVinicius NascimentoAinda não há avaliações
- Verificações ELU W310X21Documento5 páginasVerificações ELU W310X21h3rms9269Ainda não há avaliações
- NBR ABNT 14331 - Alumínio e Suas Ligas - Telhas e AcessóriosDocumento34 páginasNBR ABNT 14331 - Alumínio e Suas Ligas - Telhas e AcessóriosFernando PacholokAinda não há avaliações
- Cálculo Detalhado para Determinação Da Zona Livre de Queda (ZLQ)Documento9 páginasCálculo Detalhado para Determinação Da Zona Livre de Queda (ZLQ)maburdaAinda não há avaliações
- Aula 02 - Compressão, Flexocompressão e FlexotraçãoDocumento28 páginasAula 02 - Compressão, Flexocompressão e FlexotraçãoWagnner FerrazAinda não há avaliações
- 1494 7060 2 PBDocumento12 páginas1494 7060 2 PBFelipe Pisklevits LaubeAinda não há avaliações
- Exam 439446Documento28 páginasExam 439446Rayston WernerAinda não há avaliações
- Memoria-De-Calculo-Balancim 12.798 TonDocumento4 páginasMemoria-De-Calculo-Balancim 12.798 TonPAULO CANDEIAAinda não há avaliações
- Tabelas em Excel para Cálculo de PilaresDocumento7 páginasTabelas em Excel para Cálculo de PilaresLeonardo Andrade CavalcanteAinda não há avaliações
- PontesI Apostila2Documento58 páginasPontesI Apostila2Santos Cesar Dos Santos César CesarAinda não há avaliações
- Relatório de Galpão Metálico - Lucas Borges de Souza Da SilvaDocumento18 páginasRelatório de Galpão Metálico - Lucas Borges de Souza Da SilvaImaan AlAinda não há avaliações
- LT 500 KV Janaúba 3 - Presidente Juscelino C1: Travessia Sobre LT 69 KV Da Cemig Trecho: Montes Claros - BocaíuvaDocumento5 páginasLT 500 KV Janaúba 3 - Presidente Juscelino C1: Travessia Sobre LT 69 KV Da Cemig Trecho: Montes Claros - BocaíuvaCaio Henrique Guglielmi MoreiraAinda não há avaliações
- Lista de Exercícios Flexão em Vigas Compostas - Mecânica Dos Sólidos IIDocumento2 páginasLista de Exercícios Flexão em Vigas Compostas - Mecânica Dos Sólidos IImaismeuqueseu0% (1)
- Uso de Células Tipo STT-Furnas Na Determinação de Tensões in Situ Na Mina Cuiabá - Sabará/MGDocumento9 páginasUso de Células Tipo STT-Furnas Na Determinação de Tensões in Situ Na Mina Cuiabá - Sabará/MGRodrigo Peluci de FigueiredoAinda não há avaliações
- 1lista de Exrecícios-1s 2017Documento1 página1lista de Exrecícios-1s 2017Adriano Berchol MatiasAinda não há avaliações
- Trabalho MecanicaexperimentalDocumento9 páginasTrabalho MecanicaexperimentalIzabel CastroAinda não há avaliações
- Exerc Icios de Flex AoDocumento17 páginasExerc Icios de Flex AoualaceAinda não há avaliações
- Memorial de CálculoDocumento583 páginasMemorial de Cálculoandresantos_90Ainda não há avaliações
- Viga Metalica 2010Documento6 páginasViga Metalica 2010Cléudes Rodrigues0% (1)
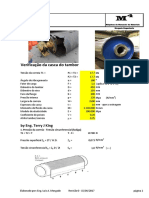
- Tambor CascaDocumento4 páginasTambor CascaJuarez LeiteAinda não há avaliações
- Estrutura de Aço Aula 5 - Engenharia CivilDocumento43 páginasEstrutura de Aço Aula 5 - Engenharia CivilNathália OliveiraAinda não há avaliações