Você também pode gostar
- Planilha Erre 5 Faça 14 Desdobre 20 Lotofácil Tribo Da Sorte v02Documento100 páginasPlanilha Erre 5 Faça 14 Desdobre 20 Lotofácil Tribo Da Sorte v02Rosy ApAinda não há avaliações
- Avaliação de MatemáticaDocumento2 páginasAvaliação de MatemáticaMarcelia Lopes Azevedo de Siqueira100% (3)
- Exemplo - Dimensionamento PiscinaDocumento11 páginasExemplo - Dimensionamento PiscinamsfuroraAinda não há avaliações
- Apostila Desenho TécnicoDocumento154 páginasApostila Desenho TécnicoThales AntunesAinda não há avaliações
- Perfil de RoscasDocumento28 páginasPerfil de RoscasValvite JuniorAinda não há avaliações
- VW Delivey VW 9.170Documento2 páginasVW Delivey VW 9.170Carine FirmianoAinda não há avaliações
- Diagrama - Contran Volksnet-19 - 11 - PT-NP-A3 Novo Cod MANDocumento1 páginaDiagrama - Contran Volksnet-19 - 11 - PT-NP-A3 Novo Cod MANmanoel bernardo neto100% (3)
- Constellation 19 330Documento2 páginasConstellation 19 330Jnr SilvaAinda não há avaliações
- Gatilho de MatematicaDocumento162 páginasGatilho de Matematicaeugenio maholela100% (1)
- Epos2020 PTDocumento485 páginasEpos2020 PTIury GomesAinda não há avaliações
- Ângulos Suplementares e ComplementaresDocumento4 páginasÂngulos Suplementares e ComplementaresMônica MarraAinda não há avaliações
- Lista Descritores Prova Parana 2 EdDocumento18 páginasLista Descritores Prova Parana 2 EdsandracaskoskiAinda não há avaliações
- Amostra Petrobras Tecnico Mecanica Desenho TecnicoDocumento5 páginasAmostra Petrobras Tecnico Mecanica Desenho TecnicoJose Carlos FernandesAinda não há avaliações
- Esquema C3Documento26 páginasEsquema C3Johnny Araujo100% (2)
- Esquema TTADocumento4 páginasEsquema TTASergio Ricardo IbañezAinda não há avaliações
- Cames 2010Documento13 páginasCames 2010Jose Roberto dos Santos100% (1)
- Apostila Mecanismos Planos 2014 V 2Documento113 páginasApostila Mecanismos Planos 2014 V 2Marcos CostaAinda não há avaliações
- 2015 - 04 - 14 Tramo 160 A 167 Relatorio Fotografico - Furto de Condutores LT TAT - ITP-IIDocumento13 páginas2015 - 04 - 14 Tramo 160 A 167 Relatorio Fotografico - Furto de Condutores LT TAT - ITP-IIFranciscoAinda não há avaliações
- Arquivo Modelo - Sa2 LlaelioDocumento2 páginasArquivo Modelo - Sa2 LlaelioLuana DallAinda não há avaliações
- Escadas Rampas ElevadoresDocumento42 páginasEscadas Rampas ElevadoresYasmin SalesAinda não há avaliações
- VW 9.170 CaminhãoDocumento2 páginasVW 9.170 CaminhãoedsonAinda não há avaliações
- Cronograma para Ações de LiderançaDocumento4 páginasCronograma para Ações de LiderançaJonathan RafaelAinda não há avaliações
- Geométrica - GD - Aula Sobre Estudo Do PontoDocumento7 páginasGeométrica - GD - Aula Sobre Estudo Do PontoSandro SteelAinda não há avaliações
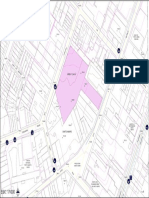
- Plano Urbanístico Setor Chucri ZaidanDocumento9 páginasPlano Urbanístico Setor Chucri ZaidanMariana MolinaAinda não há avaliações
- Fichan.º10 Propriedades PrismasepiramidesDocumento2 páginasFichan.º10 Propriedades PrismasepiramidesAkila ValAinda não há avaliações
- 2015 - 04 - 15 Tramo 136 A 145 Relatorio Fotografico - Furto de Condutores LT TAT - ITP-IIDocumento11 páginas2015 - 04 - 15 Tramo 136 A 145 Relatorio Fotografico - Furto de Condutores LT TAT - ITP-IIFranciscoAinda não há avaliações
- I17 T Sao Roque T Pinhais 16082023 1Documento1 páginaI17 T Sao Roque T Pinhais 16082023 1jackscentralAinda não há avaliações
- Material de Apoio - MAT - 9º Ano Do Ensino FundamentalDocumento27 páginasMaterial de Apoio - MAT - 9º Ano Do Ensino FundamentalbibliotecajosepereiraAinda não há avaliações
- RLS RFS G - 010 - 2021 JDocumento12 páginasRLS RFS G - 010 - 2021 JGavriel CarvalhoAinda não há avaliações
- Tabuleiro Final EcocidadeDocumento1 páginaTabuleiro Final EcocidadeMarcio FranciscoAinda não há avaliações
- Rua Torino MorenoDocumento1 páginaRua Torino Morenoengfelipemaia11Ainda não há avaliações
- Catalogo Leao 2023Documento12 páginasCatalogo Leao 2023Evandro ZilioAinda não há avaliações
- FT - Civil - 0049 - Rev01Documento6 páginasFT - Civil - 0049 - Rev01Manoel BrazAinda não há avaliações
- 15 Realizando Calculos para o Aparelho Divisor IIIDocumento7 páginas15 Realizando Calculos para o Aparelho Divisor IIIishikawa norioAinda não há avaliações
- VW Delivery 9.170 VTRONICDocumento2 páginasVW Delivery 9.170 VTRONICGustavo SiebelAinda não há avaliações
- 3.2 - Aplicação PráticaDocumento1 página3.2 - Aplicação PráticakikoAinda não há avaliações
- F-P 6.2.2!01!02 - Matriz Interna de TreinamentoDocumento2 páginasF-P 6.2.2!01!02 - Matriz Interna de TreinamentoFernando SoaresAinda não há avaliações
- FOTO AT - PneumaticoDocumento2 páginasFOTO AT - PneumaticopriscilaAinda não há avaliações
- Projeto de Terraplenagem - Calha Rio Engano - R1Documento5 páginasProjeto de Terraplenagem - Calha Rio Engano - R1diego WEIMERAinda não há avaliações
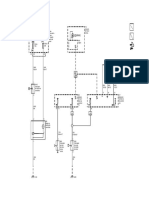
- GM Cruze - Freios Hidráulicos - Bomba de Assistência Do Servo Freio - Diagrama ElétricoDocumento1 páginaGM Cruze - Freios Hidráulicos - Bomba de Assistência Do Servo Freio - Diagrama ElétricoWiterMarcos0% (1)
- Catlogo - Magma M - 102020Documento74 páginasCatlogo - Magma M - 102020osvaldoAinda não há avaliações
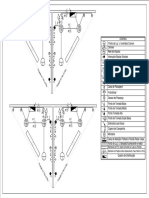
- PROJETO ELETRICA - Diagrama Unifilar - Ligação de Interruptor Paralelo e IntermediárioDocumento1 páginaPROJETO ELETRICA - Diagrama Unifilar - Ligação de Interruptor Paralelo e Intermediárioarqpaulocesar2Ainda não há avaliações
- Ângulo de Pressão - MecanismosDocumento20 páginasÂngulo de Pressão - MecanismosJose luiz coelhoAinda não há avaliações
- Jornada CientificaDocumento37 páginasJornada CientificajunilsonAinda não há avaliações
- Planejamento - Objetos de Conhecimento e HabilidadesDocumento4 páginasPlanejamento - Objetos de Conhecimento e HabilidadesMarco100% (1)
- Cronograma Start Engenharia 2023 - PDFDocumento2 páginasCronograma Start Engenharia 2023 - PDFFERNANDA PINHEIRO DE OLIVEIRAAinda não há avaliações
- POP - Procemento Operacional PadrãoDocumento1 páginaPOP - Procemento Operacional PadrãoBaltazar JuniorAinda não há avaliações
- Mont Manual Filtros Serie FR 2010Documento12 páginasMont Manual Filtros Serie FR 2010leazekaAinda não há avaliações
- Paiu Diagnostico-A31.1000Documento1 páginaPaiu Diagnostico-A31.1000Evelyn CarvalhoAinda não há avaliações
- Geo 10Documento8 páginasGeo 10Juliana AlmeidaAinda não há avaliações
- Planilha Erre 5 Faça 14 Desdobre 20 Lotofácil Tribo Da Sorte v02Documento108 páginasPlanilha Erre 5 Faça 14 Desdobre 20 Lotofácil Tribo Da Sorte v02Geraldo NunesAinda não há avaliações
- Revista Pequenas Empresas Grandes Negócios Ed 412 Nov 23Documento84 páginasRevista Pequenas Empresas Grandes Negócios Ed 412 Nov 23gustavoluizbatoliveiraAinda não há avaliações
- Representar N Umeros Reais em Computadores Digitais.: Paulo Motta Dca/UfrnDocumento3 páginasRepresentar N Umeros Reais em Computadores Digitais.: Paulo Motta Dca/UfrnAntonio LasagnaAinda não há avaliações
- Moodle Aula 05 Parafusos de PotenciaDocumento35 páginasMoodle Aula 05 Parafusos de PotenciaGuilherme CorreiaAinda não há avaliações
- Refrigera Minh'alma - Colo de DeusDocumento1 páginaRefrigera Minh'alma - Colo de DeusEdcléia Ferreira DamascenoAinda não há avaliações
- Sdam Vac - Vac 20230323Documento2 páginasSdam Vac - Vac 20230323Diego MapelliAinda não há avaliações
- Curvas Verticais-Infraestrutura de Vias TerrestresDocumento48 páginasCurvas Verticais-Infraestrutura de Vias TerrestresSamaraAinda não há avaliações
- Fundação 1as Torre 02 R00Documento1 páginaFundação 1as Torre 02 R00carlos monteiroAinda não há avaliações
- Planilha Erre 4 Faça 14 Desdobre 21 Lotofácil Tribo Da Sorte V02Documento142 páginasPlanilha Erre 4 Faça 14 Desdobre 21 Lotofácil Tribo Da Sorte V02Anderson O PredadorAinda não há avaliações
- Tabela CustoDocumento142 páginasTabela CustoAnderson O PredadorAinda não há avaliações
- LoteriaDocumento142 páginasLoteriaAnderson O PredadorAinda não há avaliações
- Atuador PneumáticoDocumento4 páginasAtuador PneumáticoAllan CutrimAinda não há avaliações
- Amostra Petrobras Tecnico Mecanica MetrologiaDocumento5 páginasAmostra Petrobras Tecnico Mecanica MetrologiaAnonymous ytKuZfYoAinda não há avaliações
- Mec - Flu.cap 11.1Documento18 páginasMec - Flu.cap 11.1Costa NetoAinda não há avaliações
- Ewo Nova - Auto ExplicativoDocumento1 páginaEwo Nova - Auto ExplicativoGlaucio Dos SantosAinda não há avaliações
- Quadro de Vagas 15.02.23Documento3 páginasQuadro de Vagas 15.02.23Glaucio Dos SantosAinda não há avaliações
- Vagas STTDocumento2 páginasVagas STTGlaucio Dos SantosAinda não há avaliações
- Vagas OttDocumento1 páginaVagas OttGlaucio Dos SantosAinda não há avaliações
- Quadro de Vagas 27.03.23 PDFDocumento3 páginasQuadro de Vagas 27.03.23 PDFGlaucio Dos SantosAinda não há avaliações
- Iee - SaepDocumento6 páginasIee - SaepGlaucio Dos SantosAinda não há avaliações
- Aula 01 - RedaçãoDocumento18 páginasAula 01 - RedaçãoGlaucio Dos SantosAinda não há avaliações
- Redação (Glaucio Santos)Documento1 páginaRedação (Glaucio Santos)Glaucio Dos SantosAinda não há avaliações
- STT.20224 Seg Chamada PDFDocumento12 páginasSTT.20224 Seg Chamada PDFGlaucio Dos SantosAinda não há avaliações
- Resolução N 1070-2015Documento48 páginasResolução N 1070-2015Glaucio Dos SantosAinda não há avaliações
- Resolução Confea N 336-1989Documento30 páginasResolução Confea N 336-1989Glaucio Dos SantosAinda não há avaliações
- Ema 137 PDFDocumento15 páginasEma 137 PDFCamila Karin100% (1)
- Simulado 2 InssDocumento17 páginasSimulado 2 InssGlaucio Dos SantosAinda não há avaliações
- Pc-Pe Segurança Do Protocolo (Revisão)Documento50 páginasPc-Pe Segurança Do Protocolo (Revisão)Glaucio Dos SantosAinda não há avaliações
- Área Técnica 8ºDN - 0Documento1 páginaÁrea Técnica 8ºDN - 0Glaucio Dos SantosAinda não há avaliações
- Festo Didactic - EletropneumaticaDocumento52 páginasFesto Didactic - EletropneumaticaDheiver SantosAinda não há avaliações
- Com8 DN Gabarito Ps SMV of 2016Documento1 páginaCom8 DN Gabarito Ps SMV of 2016Marlete Spirandelli FerreiraAinda não há avaliações
- Com1ºdn Gabarito Ps SMV of 2016 Extra AlteradoDocumento1 páginaCom1ºdn Gabarito Ps SMV of 2016 Extra AlteradoVilsonFernandesdeSouzaAinda não há avaliações
- END-PND Optimized PDFDocumento81 páginasEND-PND Optimized PDFRenan ZampilisAinda não há avaliações
- Questões de Geometria Da Eear 2000 A 2022Documento82 páginasQuestões de Geometria Da Eear 2000 A 2022suzana medeirosAinda não há avaliações
- 2º Trimestre - Atividade de RevisãoDocumento1 página2º Trimestre - Atividade de RevisãoALINE DA SILVA SANTANAAinda não há avaliações
- Fisica - Etapa 1 - Material ComplementarDocumento27 páginasFisica - Etapa 1 - Material Complementargutemberg chaves100% (1)
- Elite Edital Bolsao 2023.docx 1Documento32 páginasElite Edital Bolsao 2023.docx 1julyana carvalhoAinda não há avaliações
- Transferidor de GrauDocumento7 páginasTransferidor de GrauFabio Ruggiero100% (1)
- Matematica 7 Ano PlanejamentoDocumento6 páginasMatematica 7 Ano PlanejamentoEdvaldo SantosAinda não há avaliações
- Aula 2Documento10 páginasAula 2LUANA CRISTINA DA COSTAAinda não há avaliações
- 333156-Apostila Cefet HumbertoDocumento37 páginas333156-Apostila Cefet HumbertoGabriele Joana SouzaAinda não há avaliações
- Mov BidirecionaisDocumento16 páginasMov BidirecionaisJulia SampaioAinda não há avaliações
- Congruência de Triângulos-Páginas-1-6Documento6 páginasCongruência de Triângulos-Páginas-1-6Marcio SantosAinda não há avaliações
- Plano de Ensino Livro Didático IDocumento21 páginasPlano de Ensino Livro Didático ILilian KunzendorffAinda não há avaliações
- Apostila Ottoni Pré-Vestibular CompletaDocumento322 páginasApostila Ottoni Pré-Vestibular CompletarafaelAinda não há avaliações
- 01 05 2019 MA092 - Ex1Documento3 páginas01 05 2019 MA092 - Ex1jesufraAinda não há avaliações
- Arcos e Angulos Lista PDFDocumento4 páginasArcos e Angulos Lista PDFJô CorrêaAinda não há avaliações
- 8º Ano - PET 4 - SLIDES - SEMANA 1Documento24 páginas8º Ano - PET 4 - SLIDES - SEMANA 1Helenice Silva100% (1)
- MATEMATICA RevJunho 2023Documento16 páginasMATEMATICA RevJunho 2023Nathália JunqueiraAinda não há avaliações
- Pet Vi - 6º 602Documento34 páginasPet Vi - 6º 602walter geraldoAinda não há avaliações
- Prova Do 7º Ano - ÂngulosDocumento4 páginasProva Do 7º Ano - ÂngulosANA PAULAAinda não há avaliações
- 6 2 3 6 2 3 (2 Senc Cosc) 6 4 3 Cosc Cosc 6 4 3 6 3 4 3 3 3 2Documento4 páginas6 2 3 6 2 3 (2 Senc Cosc) 6 4 3 Cosc Cosc 6 4 3 6 3 4 3 3 3 2Thalles RanniereAinda não há avaliações
- GentilDocumento27 páginasGentiljamesbondboyAinda não há avaliações
- Ee4a51 PDFDocumento71 páginasEe4a51 PDFMayara LimaAinda não há avaliações
- Descritor 06Documento4 páginasDescritor 06Francisco Reginaldo de Souza100% (1)
- 3 - PROVA BRASILPORT - MAT - 5°anoDocumento223 páginas3 - PROVA BRASILPORT - MAT - 5°anoMaria socorro Teles MatosAinda não há avaliações
- Guia Do 7anoDocumento4 páginasGuia Do 7anoKely Regina Do Nascimento PiresAinda não há avaliações
- Avaliação de MatematicaDocumento4 páginasAvaliação de MatematicaNeirisvaldo BarbosaAinda não há avaliações