Você também pode gostar
- MAPALXDocumento19 páginasMAPALXAndrei Guilherme100% (1)
- Passo Passo Manual Sap Fi Aa Ativo ImobilizadoDocumento179 páginasPasso Passo Manual Sap Fi Aa Ativo ImobilizadoHenrique Siqueira93% (15)
- Gefran 600 - Manual PTDocumento30 páginasGefran 600 - Manual PTchnanduAinda não há avaliações
- Desenvolvendo Projetos Em C Para Stm8 Volume ÚnicoNo EverandDesenvolvendo Projetos Em C Para Stm8 Volume ÚnicoAinda não há avaliações
- As 10 etapas para o desenvolvimento de formulações cosméticasDocumento10 páginasAs 10 etapas para o desenvolvimento de formulações cosméticasDesenvolvimentoAinda não há avaliações
- Manual do Usuário SYSDRIVE JXDocumento16 páginasManual do Usuário SYSDRIVE JXreinaldopf2011Ainda não há avaliações
- 1 - CLP Completa R05 - CompletoDocumento149 páginas1 - CLP Completa R05 - CompletobarretimufuAinda não há avaliações
- Cappo 10Documento2 páginasCappo 10Denise Pereira100% (1)
- TECNOLOGIA EM PROTEÇÃO ELÉTRICA E AUTOMAÇÃO INDUSTRIALDocumento53 páginasTECNOLOGIA EM PROTEÇÃO ELÉTRICA E AUTOMAÇÃO INDUSTRIALDaniloAinda não há avaliações
- ManualDocumento46 páginasManualinspi200786% (14)
- Exercícios de Fixação - Módulo VDocumento4 páginasExercícios de Fixação - Módulo VCaroline Costa100% (3)
- Apostila programação-clp-avançadoDocumento35 páginasApostila programação-clp-avançadoLP MaxAinda não há avaliações
- Manual de Programação Avançada - CLP MatsushitaDocumento34 páginasManual de Programação Avançada - CLP MatsushitatonnytoonsAinda não há avaliações
- Manual de Operacao Controlador TemperaturaDocumento24 páginasManual de Operacao Controlador TemperaturamarivapopAinda não há avaliações
- Guia-Rapido Inversor MX2Documento28 páginasGuia-Rapido Inversor MX2Robson Dorival Cordeiro100% (1)
- DM310Documento37 páginasDM310José EduardoAinda não há avaliações
- Amperimetro Digital Aob294i-5k1 SibratecDocumento1 páginaAmperimetro Digital Aob294i-5k1 SibratecLuis Claudio RamosAinda não há avaliações
- Contador rápido com encoder e PLC TwidoDocumento4 páginasContador rápido com encoder e PLC TwidoGlenda Carvalho De PaivaAinda não há avaliações
- Contador Rapido Com Encoder e PLC TwidoDocumento4 páginasContador Rapido Com Encoder e PLC TwidoGlenda Carvalho De PaivaAinda não há avaliações
- Soluções de medição, controle e monitoramento de processos industriaisDocumento12 páginasSoluções de medição, controle e monitoramento de processos industriaisrony silvaAinda não há avaliações
- Catalogo Controladores de Temperatura Ind 2Documento12 páginasCatalogo Controladores de Temperatura Ind 2lekobh0% (1)
- Catalogo CAREL - Sensores, Transdutores, Válvulas, ModelosDocumento355 páginasCatalogo CAREL - Sensores, Transdutores, Válvulas, Modelosleonardo machadoAinda não há avaliações
- Manual de Instruções LWTD-07 - Rev.0Documento2 páginasManual de Instruções LWTD-07 - Rev.0778706Ainda não há avaliações
- 1-Transdutores OkDocumento15 páginas1-Transdutores OkGabriel Rodrigues Matias Da SilvaAinda não há avaliações
- Poligrafo AutomacaoDocumento36 páginasPoligrafo Automacaoheloisa ceolinAinda não há avaliações
- Cappo PlusDocumento2 páginasCappo PlusrmlarangAinda não há avaliações
- Sa5000 01 - PT BRDocumento5 páginasSa5000 01 - PT BRCislandia PereiraAinda não há avaliações
- Inversor CFW11Documento7 páginasInversor CFW11Vinicius PaisAinda não há avaliações
- Conversão Analógica-Digital e Digital AnalógicaDocumento11 páginasConversão Analógica-Digital e Digital AnalógicaFelipe MarschallAinda não há avaliações
- C51X V1 00-Rev 00Documento28 páginasC51X V1 00-Rev 00Rafael PaivaAinda não há avaliações
- K103 Controle PID-P: Manual de Instruções para Controlador Digital de TemperaturaDocumento2 páginasK103 Controle PID-P: Manual de Instruções para Controlador Digital de TemperaturaRoberto AluizioAinda não há avaliações
- Monitoramento de TransformadorDocumento21 páginasMonitoramento de TransformadorRodrigo RohdeAinda não há avaliações
- LR2050 Sensor de nível contínuoDocumento5 páginasLR2050 Sensor de nível contínuoLeandro PlácidoAinda não há avaliações
- SD1540-00_PT-BRDocumento5 páginasSD1540-00_PT-BRAllan BarbosaAinda não há avaliações
- Microcontrolador CLPDocumento149 páginasMicrocontrolador CLPCARLOS BARBOSAAinda não há avaliações
- Controle temperatura CTM45Documento15 páginasControle temperatura CTM45ademilsonviotoAinda não há avaliações
- Teoria ED2 Conversor - DADocumento17 páginasTeoria ED2 Conversor - DARoberta FerrazAinda não há avaliações
- 10) PWMDocumento10 páginas10) PWMCristhianVogelAinda não há avaliações
- Manual TC4S-14RDocumento2 páginasManual TC4S-14RLeandro100% (1)
- Controle de Processos IndustriaisDocumento24 páginasControle de Processos IndustriaisAlexandre SchiavinatoAinda não há avaliações
- Manual de operação PCPT 3Documento17 páginasManual de operação PCPT 3Luciano DominguesAinda não há avaliações
- Aula #03 - Mapas de Entradas e SaídasDocumento92 páginasAula #03 - Mapas de Entradas e SaídasJoão Marcos OliveiraAinda não há avaliações
- Proteção elétrica industrialDocumento44 páginasProteção elétrica industrialLucas CostaAinda não há avaliações
- MNE CLP s9300 - Rev2Documento8 páginasMNE CLP s9300 - Rev2luissimmAinda não há avaliações
- Catálogo_AVR_rev4 - ptDocumento9 páginasCatálogo_AVR_rev4 - ptDISJUNTORAinda não há avaliações
- Novus Indicador N1500GDocumento7 páginasNovus Indicador N1500GCarlos Henrique Rocha BarbosaAinda não há avaliações
- Sensor NH3 IFMDocumento4 páginasSensor NH3 IFMwagnerAinda não há avaliações
- Configuração e instalação do transmissor isolado 4-20mADocumento3 páginasConfiguração e instalação do transmissor isolado 4-20mALeonardo FaveroAinda não há avaliações
- Interface Analógico-DigitalDocumento23 páginasInterface Analógico-DigitalFillipe Lucchin PauknerAinda não há avaliações
- Inversor - IF10Documento16 páginasInversor - IF10Valdemir da silvaAinda não há avaliações
- Manual g103 PidDocumento2 páginasManual g103 PidFelipe TadeuAinda não há avaliações
- Sensor de FluxoDocumento5 páginasSensor de FluxoIvan FerreiraAinda não há avaliações
- SV4200 00 - PT BRDocumento6 páginasSV4200 00 - PT BRGoAinda não há avaliações
- PN2020 01 - PT BRDocumento5 páginasPN2020 01 - PT BRDiego BragaAinda não há avaliações
- Controle de temperatura proporcional e ON/OFF com ajuste de parâmetrosDocumento1 páginaControle de temperatura proporcional e ON/OFF com ajuste de parâmetroslordefarias100% (1)
- Projetos Em Clp Ladder Baseado No Twidosuite Parte VNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte VAinda não há avaliações
- Projetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte XxxNo EverandProjetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte XxxAinda não há avaliações
- Projetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte XiiNo EverandProjetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte XiiAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiAinda não há avaliações
- Rtos Para Medição De Co Com Base No Rtos Osa, Mikroc Pro E Pic18f4620No EverandRtos Para Medição De Co Com Base No Rtos Osa, Mikroc Pro E Pic18f4620Ainda não há avaliações
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte VNo EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte VAinda não há avaliações
- Medindo O Valor De Pico Fluxo De Massa Programado Em Arduino Esp32No EverandMedindo O Valor De Pico Fluxo De Massa Programado Em Arduino Esp32Ainda não há avaliações
- Medindo O Valor De Pico Da Medição De Fluxo De Massa Programado No ArduinoNo EverandMedindo O Valor De Pico Da Medição De Fluxo De Massa Programado No ArduinoAinda não há avaliações
- WEG CFW 08 Manual Do Usuario 0899.5241 5.2x Manual Portugues BRDocumento214 páginasWEG CFW 08 Manual Do Usuario 0899.5241 5.2x Manual Portugues BRJeferson TavaresAinda não há avaliações
- Guia Da Partida: X Athletico-PRDocumento24 páginasGuia Da Partida: X Athletico-PRLP MaxAinda não há avaliações
- Ta 11Documento2 páginasTa 11LP MaxAinda não há avaliações
- Ta 11Documento2 páginasTa 11LP MaxAinda não há avaliações
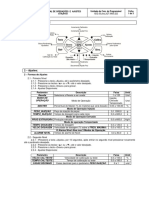
- 1 - Função Das Teclas:: Manual de Operações E Ajustes GTAJ0103 Unidade de Com. de Programável Folha 1 de 3Documento3 páginas1 - Função Das Teclas:: Manual de Operações E Ajustes GTAJ0103 Unidade de Com. de Programável Folha 1 de 3LP MaxAinda não há avaliações
- Balança: Manual de EquipamentoDocumento7 páginasBalança: Manual de EquipamentoLP MaxAinda não há avaliações
- 1 - Função Das Teclas:: Manual de Operações E Ajustes GTAJ0103 Unidade de Com. de Programável Folha 1 de 3Documento3 páginas1 - Função Das Teclas:: Manual de Operações E Ajustes GTAJ0103 Unidade de Com. de Programável Folha 1 de 3LP MaxAinda não há avaliações
- Cultura para fungos no pescoço sem desenvolvimento de fungosDocumento1 páginaCultura para fungos no pescoço sem desenvolvimento de fungosLP MaxAinda não há avaliações
- Sistema empresarial compartilha informaçõesDocumento2 páginasSistema empresarial compartilha informaçõesRodrigo AlvesAinda não há avaliações
- RIP 2020 - 8 ReferenciasDocumento6 páginasRIP 2020 - 8 ReferenciasElias FlachAinda não há avaliações
- Portfólio Individual Projeto de Extensão I - Engenharia de Produção - Bacharelado 2023 - Programa de Ação e Difusão CulturalDocumento1 páginaPortfólio Individual Projeto de Extensão I - Engenharia de Produção - Bacharelado 2023 - Programa de Ação e Difusão CulturalAlex NascimentoAinda não há avaliações
- Introducao A Contabilidade e Analise deDocumento184 páginasIntroducao A Contabilidade e Analise deMaycon FarinhaAinda não há avaliações
- Sociedade Anônima: origem, características e estrutura administrativaDocumento23 páginasSociedade Anônima: origem, características e estrutura administrativaGuire J.BAinda não há avaliações
- Relatório E Contas 2020: Empresa de Eletricidade E Água, SaDocumento87 páginasRelatório E Contas 2020: Empresa de Eletricidade E Água, SaManuel AlvesAinda não há avaliações
- L Frenagem - Nest Terral 0544 LiberaçãoDocumento9 páginasL Frenagem - Nest Terral 0544 LiberaçãokuramaxAinda não há avaliações
- Plano de Desenvolvimento Rural Sustentável do Portal do SertãoDocumento93 páginasPlano de Desenvolvimento Rural Sustentável do Portal do SertãoAna BrandãoAinda não há avaliações
- Procuração judicial para advogadoDocumento3 páginasProcuração judicial para advogadoRomario RochaAinda não há avaliações
- Guia Metodológico ANQEPDocumento101 páginasGuia Metodológico ANQEPHelenaBaptistaAinda não há avaliações
- Artigo - Márcio Tilly Moutinho Da SilvaDocumento5 páginasArtigo - Márcio Tilly Moutinho Da SilvaMarcio SilvaAinda não há avaliações
- Oferta de Milho em MocubaDocumento73 páginasOferta de Milho em MocubaKelven Mendes Victorino100% (1)
- Matemática Financeira - EstácioDocumento5 páginasMatemática Financeira - EstácioEquipe Contábil / FiscalAinda não há avaliações
- PL2630 PDFDocumento4 páginasPL2630 PDFyasminAinda não há avaliações
- Relatório Mecânica Dos Solos - LLDocumento11 páginasRelatório Mecânica Dos Solos - LLmaykon.xtreme211Ainda não há avaliações
- Baumgart01 PDFDocumento213 páginasBaumgart01 PDFWellington PercilioAinda não há avaliações
- Requisitos Comercial (8.2)Documento8 páginasRequisitos Comercial (8.2)Claudia LimaAinda não há avaliações
- Experimental Development of Calcium Looping CarbonDocumento27 páginasExperimental Development of Calcium Looping CarbonRobson Rocha OliveiraAinda não há avaliações
- Proteção de falta à terra no estator de geradoresDocumento8 páginasProteção de falta à terra no estator de geradoresodenir_rodAinda não há avaliações
- Abordagem BurocraticaDocumento16 páginasAbordagem BurocraticaRafael BartolyAinda não há avaliações
- Planejamento Comercial Da Célula de SDRDocumento1 páginaPlanejamento Comercial Da Célula de SDRgabi.dandaxAinda não há avaliações
- Tabela Preço Itens Mágicos DeD5e PDFDocumento55 páginasTabela Preço Itens Mágicos DeD5e PDFGustavo GasparAinda não há avaliações
- Lancamento Coberto de Opcoes PDFDocumento10 páginasLancamento Coberto de Opcoes PDFRodrigo Pereira Da SilvaAinda não há avaliações
- Plano Mestre de ProduçãoDocumento284 páginasPlano Mestre de ProduçãoEliasDeOliveiraAvila100% (2)
- Situação Das Convocações Hu Unifap - Fevereiro - 2024Documento8 páginasSituação Das Convocações Hu Unifap - Fevereiro - 2024maatheussoouzaaAinda não há avaliações
- Construção de Terminal Pescado Mar AlegreDocumento79 páginasConstrução de Terminal Pescado Mar AlegrePaulo HenriqueAinda não há avaliações