Você também pode gostar
- Redes De Computadores DescomplicadasNo EverandRedes De Computadores DescomplicadasAinda não há avaliações
- Desenvolvendo Um Medidor Amperímetro Modbus Rs232 No Stm32f103 Programado No ArduinoNo EverandDesenvolvendo Um Medidor Amperímetro Modbus Rs232 No Stm32f103 Programado No ArduinoAinda não há avaliações
- Resumo Prova 1Documento7 páginasResumo Prova 1Alemao BovinoAinda não há avaliações
- Apostila - Profibus DPDocumento18 páginasApostila - Profibus DPPaulo AbreuAinda não há avaliações
- ALFA - Protocolo de Comunicaçao Modulos AlfaDocumento16 páginasALFA - Protocolo de Comunicaçao Modulos AlfaJardel100% (1)
- Dispositivos de Entrada e SaídaDocumento3 páginasDispositivos de Entrada e SaídaSeline OliveiraAinda não há avaliações
- Treinamento Switch L2 CESoP L3-TCE PDFDocumento167 páginasTreinamento Switch L2 CESoP L3-TCE PDFJuca LocoAinda não há avaliações
- Sistemas de Entrada e SaídaDocumento23 páginasSistemas de Entrada e SaídaMauro Hemerly GazzaniAinda não há avaliações
- VlanDocumento52 páginasVlanZemilena SantosAinda não há avaliações
- DNP3 0p3Documento5 páginasDNP3 0p3GuilhermeAinda não há avaliações
- Cisco CCNA 200-301Documento5 páginasCisco CCNA 200-301Elisiö Dicälä Homem da LéiAinda não há avaliações
- Redes ProfibusDocumento15 páginasRedes ProfibuschnanduAinda não há avaliações
- 2 - Redes LocaisDocumento37 páginas2 - Redes LocaisツAnonymousAinda não há avaliações
- Redes Industriais - 3 - ProfibusDocumento5 páginasRedes Industriais - 3 - ProfibusVanessa PinaAinda não há avaliações
- Concentradores de RedesDocumento14 páginasConcentradores de RedesJonathan R MouraAinda não há avaliações
- Protocolo DNP3 v2 PDFDocumento4 páginasProtocolo DNP3 v2 PDFMarcos DanielAinda não há avaliações
- Apresentação SWITCH REDE IIDocumento15 páginasApresentação SWITCH REDE IINilson Neves HolosbachAinda não há avaliações
- Aula17 OAC-IDocumento32 páginasAula17 OAC-IVinicius ReisAinda não há avaliações
- Definição Das Sete Camadas Do Modelo OSI e Explicação de Suas Funçõe1Documento143 páginasDefinição Das Sete Camadas Do Modelo OSI e Explicação de Suas Funçõe1Felipe DanielAinda não há avaliações
- INTERTRAVAMETOSDocumento1 páginaINTERTRAVAMETOSsamaraAinda não há avaliações
- Treinamento Switch V7 PDFDocumento139 páginasTreinamento Switch V7 PDFSamuel Freire CorrêaAinda não há avaliações
- CCNADocumento42 páginasCCNAAna Cristina Rodrigues SousaAinda não há avaliações
- TCP-IP - Aula 01 e 02 - CompletaDocumento88 páginasTCP-IP - Aula 01 e 02 - CompletaRicardo Maximo0% (1)
- CDP 400-IvDocumento7 páginasCDP 400-IvLeandro KumazawaAinda não há avaliações
- Treinamento - Switch - V8.1 DMVIEW+L2+L3+MPLS - 14-02-2014Documento188 páginasTreinamento - Switch - V8.1 DMVIEW+L2+L3+MPLS - 14-02-2014João Gilberto Fernandes100% (1)
- Linha DM4100: Descritivo DM4100 - Mar/2022 - Ver 41Documento25 páginasLinha DM4100: Descritivo DM4100 - Mar/2022 - Ver 41JAIRAinda não há avaliações
- Pesquisa Sobre BarramentosDocumento22 páginasPesquisa Sobre BarramentosLr103Ainda não há avaliações
- CISCO Modulo 06 e 07Documento32 páginasCISCO Modulo 06 e 07Max contabilAinda não há avaliações
- Lista de Exercícios Sobre - Entrada - Saída e BarramentosDocumento5 páginasLista de Exercícios Sobre - Entrada - Saída e BarramentosBOT DO MILHÃOAinda não há avaliações
- Redes Industriais - ModBus PDFDocumento12 páginasRedes Industriais - ModBus PDFVinny TukAinda não há avaliações
- Questionario Protocolos de Redes LocaisDocumento6 páginasQuestionario Protocolos de Redes LocaisAcademicosTIAinda não há avaliações
- Dm2100 OidDocumento54 páginasDm2100 Oidthiago_sampaioAinda não há avaliações
- Resumo Prova de Arquitetura de ComputadoresDocumento6 páginasResumo Prova de Arquitetura de Computadoresvieirafds17Ainda não há avaliações
- Descritivo DmSwitch 4100Documento25 páginasDescritivo DmSwitch 4100Luiz CarlosAinda não há avaliações
- 4 01-Modelos-de-Troca-de-DadosDocumento35 páginas4 01-Modelos-de-Troca-de-DadosMateus CarvalhoAinda não há avaliações
- 02 Rede de ComputadoresDocumento69 páginas02 Rede de ComputadoresAngelo RoncalliAinda não há avaliações
- UNIDADE 3.4 - DeviceNetDocumento27 páginasUNIDADE 3.4 - DeviceNetedmar2emanoellAinda não há avaliações
- Protocolo SNMP PDFDocumento37 páginasProtocolo SNMP PDFFábio NovaskiAinda não há avaliações
- Redes em AnelDocumento8 páginasRedes em AnelCristianoAinda não há avaliações
- Apostila - Curso MikrotikDocumento47 páginasApostila - Curso MikrotikEduardo Nantes100% (3)
- Rede Ethernet IndustrialDocumento36 páginasRede Ethernet Industriallorentz franklinAinda não há avaliações
- Lista 3 - Marcone Gabriel Da SilvaDocumento6 páginasLista 3 - Marcone Gabriel Da SilvaMARCONE GABRIEL DA SILVAAinda não há avaliações
- Barramentos Do SistemaDocumento19 páginasBarramentos Do SistemaMundo da CriatividadeAinda não há avaliações
- ModeloosiDocumento25 páginasModeloosiFernando Jorge MendesAinda não há avaliações
- Treinamento Smart ClassDocumento54 páginasTreinamento Smart ClassAndré BorgesAinda não há avaliações
- Datacom DM4100 Eth44gt+4gc+2xx+s+mplsDocumento24 páginasDatacom DM4100 Eth44gt+4gc+2xx+s+mplsSalatiel MeloAinda não há avaliações
- Atividades EaD Do 2º BimestreDocumento3 páginasAtividades EaD Do 2º BimestreBreno de SáAinda não há avaliações
- Introduçã - E-SDocumento16 páginasIntroduçã - E-SCyber Só Por amorAinda não há avaliações
- Atividade 2 Arquitetura de ComputadoresDocumento4 páginasAtividade 2 Arquitetura de ComputadoresVictor CastroAinda não há avaliações
- TransXpress SiemensDocumento12 páginasTransXpress SiemensRicardi Martinelli MartinsAinda não há avaliações
- Operação, Administração e Manutenção (OAM)Documento7 páginasOperação, Administração e Manutenção (OAM)SandroAinda não há avaliações
- Fala ApresentaçãoDocumento2 páginasFala ApresentaçãoRafael AndradeAinda não há avaliações
- Rota de Aprendizagem Redes de Computadores Aula 02Documento10 páginasRota de Aprendizagem Redes de Computadores Aula 02Dilnei MottaAinda não há avaliações
- Aula3 SNMP PDFDocumento24 páginasAula3 SNMP PDFIvan SaboiaAinda não há avaliações
- Aula 1 - Sistemas OperacionaisDocumento9 páginasAula 1 - Sistemas OperacionaisDaniel vidsAinda não há avaliações
- Trabalho de TICDocumento8 páginasTrabalho de TICXu CorporationAinda não há avaliações
- MVI56E MCMMCMXT Datasheet PDFDocumento4 páginasMVI56E MCMMCMXT Datasheet PDFLougan LuzAinda não há avaliações
- Aula Modulo 2 - 2021Documento21 páginasAula Modulo 2 - 2021António Graciano MiloAinda não há avaliações
- Modelo Iso de Gerenciamento de RedesDocumento9 páginasModelo Iso de Gerenciamento de RedesNaldo VilelaAinda não há avaliações
- Desenvolvendo Um Medidor Termômetro Modbus Rs232 No Stm32f103 Programado No ArduinoNo EverandDesenvolvendo Um Medidor Termômetro Modbus Rs232 No Stm32f103 Programado No ArduinoAinda não há avaliações
- Redes Industriais - 6 - 3 - TCPDocumento3 páginasRedes Industriais - 6 - 3 - TCPVanessa PinaAinda não há avaliações
- Redes Industriais - 6 - 2 - UDPDocumento1 páginaRedes Industriais - 6 - 2 - UDPVanessa PinaAinda não há avaliações
- Redes Industriais - 7 - Device NetDocumento3 páginasRedes Industriais - 7 - Device NetVanessa PinaAinda não há avaliações
- Redes Industriais - 6 - 0 - Redes de Transportes IntroDocumento1 páginaRedes Industriais - 6 - 0 - Redes de Transportes IntroVanessa PinaAinda não há avaliações
- Redes Industriais - 3 - ProfibusDocumento5 páginasRedes Industriais - 3 - ProfibusVanessa PinaAinda não há avaliações
- Redes Industriais - 2 - Normas Comunicação SérieDocumento2 páginasRedes Industriais - 2 - Normas Comunicação SérieVanessa PinaAinda não há avaliações
- Redes Industriais - 5 - Profibus Perfis de AplicaçãoDocumento2 páginasRedes Industriais - 5 - Profibus Perfis de AplicaçãoVanessa PinaAinda não há avaliações
- Evolução Baterias 5Documento3 páginasEvolução Baterias 5Vanessa PinaAinda não há avaliações
- Evolução Baterias 3Documento9 páginasEvolução Baterias 3Vanessa PinaAinda não há avaliações
- Evolução Baterias 2Documento2 páginasEvolução Baterias 2Vanessa PinaAinda não há avaliações
- Atividade 02Documento2 páginasAtividade 02Nhom NhomAinda não há avaliações
- Entrevista de Philadelpho de MenezesDocumento15 páginasEntrevista de Philadelpho de MenezesJô FelixAinda não há avaliações
- 3D Machine ONE ManualDocumento26 páginas3D Machine ONE ManualMarcio LuizAinda não há avaliações
- 17 - Git Do Básico Ao AvançadoDocumento90 páginas17 - Git Do Básico Ao AvançadoAndre AngeloAinda não há avaliações
- Manual de Uso Plataforma V3Documento50 páginasManual de Uso Plataforma V3Tomaz PiresAinda não há avaliações
- I18n PT-BRDocumento73 páginasI18n PT-BRZeeshan JafarAinda não há avaliações
- Manual STRAP STBatchDocumento21 páginasManual STRAP STBatchdodospAinda não há avaliações
- Manual Ti 420Documento66 páginasManual Ti 420Paulo OliveiraAinda não há avaliações
- Tutorial Transmissao Obs StudioDocumento12 páginasTutorial Transmissao Obs StudioAndrei SilvaAinda não há avaliações
- Diretrizes de Topologia e Funcionalidades Técnicas Rede Metro EthernetDocumento8 páginasDiretrizes de Topologia e Funcionalidades Técnicas Rede Metro EthernetAlex GonçalvesAinda não há avaliações
- Catálogo Chave Sem Fio V4 TIADocumento5 páginasCatálogo Chave Sem Fio V4 TIAProjetos TonioloAinda não há avaliações
- Algoritmos de Coordenação Da Camada MAC Do 802Documento40 páginasAlgoritmos de Coordenação Da Camada MAC Do 802Rodrigo MaximoAinda não há avaliações
- Aula 1 CCNA2Documento17 páginasAula 1 CCNA2ArlimarAinda não há avaliações
- GTRProcessor GIS GettingStartedDocumento16 páginasGTRProcessor GIS GettingStartedAnderson de Oliveira SilvaAinda não há avaliações
- Manual MD10KVR - UM - PT-BR - 12V-2.0A - 2020-11-10Documento53 páginasManual MD10KVR - UM - PT-BR - 12V-2.0A - 2020-11-10Jailson SantosAinda não há avaliações
- Questoes AwsDocumento10 páginasQuestoes AwsWELTON SANTOSAinda não há avaliações
- Motor Com Regulador Eletrônico de Velocidade (R.E.V.) PróprioDocumento1 páginaMotor Com Regulador Eletrônico de Velocidade (R.E.V.) PróprioMatheus CausAinda não há avaliações
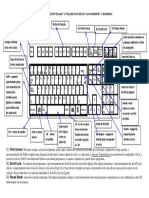
- Funções Do TecladoDocumento1 páginaFunções Do TecladoLuanna Cunha100% (2)
- MONOGRAFIA Implantação de Sistema VoIP Na Universidade Federal de Lavras Utilizando Softwares Livres PDFDocumento78 páginasMONOGRAFIA Implantação de Sistema VoIP Na Universidade Federal de Lavras Utilizando Softwares Livres PDFAldmiro MuquixeAinda não há avaliações
- Infográfico YouTubeDocumento1 páginaInfográfico YouTubeElen Karine Leite BritoAinda não há avaliações
- LCT NPT - 1200 TreinamentoDocumento182 páginasLCT NPT - 1200 TreinamentosauloAinda não há avaliações
- Vetores, Fotos de Arquivo e Downloads PSD Grátis - FreepikDocumento5 páginasVetores, Fotos de Arquivo e Downloads PSD Grátis - FreepikHumunculo FilosofalAinda não há avaliações
- Como Funciona A Memória Do ComputadorDocumento21 páginasComo Funciona A Memória Do ComputadorjesusAinda não há avaliações
- Analógico e DigitalDocumento3 páginasAnalógico e DigitalGuto LimaAinda não há avaliações
- Ebook LinkedinDocumento30 páginasEbook LinkedinCristiana LimaAinda não há avaliações
- Atividade 2 CorrigidaDocumento4 páginasAtividade 2 CorrigidaTercio FeijóAinda não há avaliações
- 5 - Tópicos Avançados em React NativeDocumento66 páginas5 - Tópicos Avançados em React NativeDoubt NatorAinda não há avaliações
- Export at XTDocumento6 páginasExport at XTJose RobertoAinda não há avaliações
- Aula 1-Componentes Eletrônicos Básicos-04ago22Documento11 páginasAula 1-Componentes Eletrônicos Básicos-04ago22valdir AraújoAinda não há avaliações
- Estrutura ProtheusDocumento32 páginasEstrutura ProtheusLuis100% (1)