Você também pode gostar
- Form 40 Itens Obrigatórios para o Relatório Hidrogeológico Data de Atualização 04202011Documento8 páginasForm 40 Itens Obrigatórios para o Relatório Hidrogeológico Data de Atualização 04202011Ramon DiazAinda não há avaliações
- Roteiros P123 Cursor Manivela, Garfo Escocês e Multiplicador de Força 2022Documento12 páginasRoteiros P123 Cursor Manivela, Garfo Escocês e Multiplicador de Força 2022Luiz CarlosAinda não há avaliações
- 3051 TT3.1 perfilUPNDocumento1 página3051 TT3.1 perfilUPNSandra De Sousa GomesAinda não há avaliações
- Curvas Características de ResistoresDocumento12 páginasCurvas Características de ResistorestoshugoAinda não há avaliações
- 1 Lista de Exercicios Econometria1 2019 PDFDocumento2 páginas1 Lista de Exercicios Econometria1 2019 PDFCatarina TorresAinda não há avaliações
- Correção de Teste de Vias de Comunicação IIDocumento4 páginasCorreção de Teste de Vias de Comunicação IIBelmiroAinda não há avaliações
- Avaliação n2Documento95 páginasAvaliação n2Giovanna Rafaella MoraesAinda não há avaliações
- Torque ParafusosDocumento11 páginasTorque ParafusosAndré GraeffAinda não há avaliações
- Exercício Sobre Fluxo de CargaDocumento2 páginasExercício Sobre Fluxo de CargaHedimilton BiocheAinda não há avaliações
- Análise Estática e Dinâmica de Freios de SapataDocumento2 páginasAnálise Estática e Dinâmica de Freios de SapataRayana Garcia de AmorimAinda não há avaliações
- Neoprene FinalDocumento26 páginasNeoprene Finalroberto chust carvalhoAinda não há avaliações
- Tolerâncias ISA BitolasDocumento1 páginaTolerâncias ISA BitolasVinicius Prates SilvaAinda não há avaliações
- Manual Eletromagnetico 2020 - Alt 04.09Documento34 páginasManual Eletromagnetico 2020 - Alt 04.09Dangelo RodriguesAinda não há avaliações
- Prova de Lab de EletricidadeDocumento6 páginasProva de Lab de EletricidadeSamuel PereiraAinda não há avaliações
- Perfil IPEDocumento1 páginaPerfil IPEErivaldo W. Dos SantosAinda não há avaliações
- Catalogo Sistema ContactDocumento88 páginasCatalogo Sistema ContactDaniel SeverinoAinda não há avaliações
- Examen Parcial 2 PDFDocumento10 páginasExamen Parcial 2 PDFFABIÁN DIAZAinda não há avaliações
- Tabela Questão 2Documento5 páginasTabela Questão 2JAIRO LEITE NASCIMENTOAinda não há avaliações
- Questões Pré e Pos - Laboratoriais - Lançamento HorizontalDocumento6 páginasQuestões Pré e Pos - Laboratoriais - Lançamento HorizontalduartesachancaAinda não há avaliações
- 3 Avaliação Lista de Execercícios - Ieq 2022Documento4 páginas3 Avaliação Lista de Execercícios - Ieq 2022mauricio FilhoAinda não há avaliações
- 8435 - Perfil - HEA - CópiaDocumento1 página8435 - Perfil - HEA - CópiaJose BritesAinda não há avaliações
- Exercício Proposto - Perfil Longitudinal e Curvas S1 e S2Documento3 páginasExercício Proposto - Perfil Longitudinal e Curvas S1 e S2Emily RufinoAinda não há avaliações
- Cálculo Da MadeiraDocumento161 páginasCálculo Da MadeiraElvis FurtadoAinda não há avaliações
- Grafico 1Documento3 páginasGrafico 1Lucas AlbuquerqueAinda não há avaliações
- Tabela Questão 2Documento7 páginasTabela Questão 2JAIRO LEITE NASCIMENTOAinda não há avaliações
- Tabelas 12 Classe Estabelecimento Recebendo Pubçlico Tipo IndustrialDocumento1 páginaTabelas 12 Classe Estabelecimento Recebendo Pubçlico Tipo IndustrialTresor GracaAinda não há avaliações
- Gerenciamento de Custos em Projetos - FGVDocumento9 páginasGerenciamento de Custos em Projetos - FGVHiago60% (5)
- Tarefa 2 - LaboratórioDocumento6 páginasTarefa 2 - LaboratórioAlexia ResplandesAinda não há avaliações
- Aula Pratica 2.3 - AAHSTO FinalDocumento8 páginasAula Pratica 2.3 - AAHSTO FinalClinton JesusAinda não há avaliações
- Anexo 5 Calculo de Esforco MecanicoDocumento129 páginasAnexo 5 Calculo de Esforco MecanicoGuilhermeLuísEberhardtAinda não há avaliações
- Cálculo Da MadeiraDocumento142 páginasCálculo Da MadeiraMarcosMonteiroAinda não há avaliações
- Manual Torno Mecânico NaganoDocumento24 páginasManual Torno Mecânico NaganoPelicano Construções RenovaçãoAinda não há avaliações
- Perfil HEBDocumento1 páginaPerfil HEBErivaldo W. Dos SantosAinda não há avaliações
- AP2 - Benvindo - LukokiDocumento3 páginasAP2 - Benvindo - LukokiVital Batista VitalAinda não há avaliações
- Relatório Alteração Parâmetro Drop-OutDocumento3 páginasRelatório Alteração Parâmetro Drop-OutThiago FerreiraAinda não há avaliações
- Thiago Fernandes Torres - Atividades - Classificação AbcDocumento5 páginasThiago Fernandes Torres - Atividades - Classificação AbcVITORIA DAS DORES SILVESTRE ANDRADEAinda não há avaliações
- O Gerenciamento de Custos FGV 1555735 PDFDocumento13 páginasO Gerenciamento de Custos FGV 1555735 PDFHiagoAinda não há avaliações
- Exercicio MBA Game e PL 1Documento8 páginasExercicio MBA Game e PL 1lucassimao98Ainda não há avaliações
- 07 - VPL em Perpetuidade - Análise de ProjetosDocumento8 páginas07 - VPL em Perpetuidade - Análise de ProjetosWaneise SouzaAinda não há avaliações
- Cantoneira Abas Iguais: Tabela TécnicaDocumento1 páginaCantoneira Abas Iguais: Tabela TécnicaKhia RoxAinda não há avaliações
- Universidade Santa Cecilia Engenharia ElDocumento14 páginasUniversidade Santa Cecilia Engenharia ElAdelmoKarigAinda não há avaliações
- Cálculo Do Rendimento de Uma Bomba LeãoDocumento6 páginasCálculo Do Rendimento de Uma Bomba LeãochagasidiarnAinda não há avaliações
- Exercc3adcios Lista 01 Com Gabarito ExplDocumento4 páginasExercc3adcios Lista 01 Com Gabarito ExpldeboramanagerAinda não há avaliações
- UntitledDocumento2 páginasUntitledSydney de Oliveira DiasAinda não há avaliações
- Tabela de Desgaste Material Rodante Cana J.D. 2019Documento12 páginasTabela de Desgaste Material Rodante Cana J.D. 2019Claudinho MontenegroAinda não há avaliações
- CÁLCULOS - Ensaio de Compressão Não DrenadaDocumento3 páginasCÁLCULOS - Ensaio de Compressão Não Drenadamatheus beltrãoAinda não há avaliações
- RA2 ECONOMIA DE EMPRESA Peso 5 MDocumento2 páginasRA2 ECONOMIA DE EMPRESA Peso 5 MThayane OliveiraAinda não há avaliações
- Quadro Cargas Se 300Documento5 páginasQuadro Cargas Se 300matheus.arantes123Ainda não há avaliações
- Pratica 6Documento8 páginasPratica 6Rodrigo RamosAinda não há avaliações
- Tabela Tolerância DimensionalDocumento8 páginasTabela Tolerância Dimensionalgqkkypc0dAinda não há avaliações
- Aplicação Curvas S No Gerenciamento - ListaDocumento25 páginasAplicação Curvas S No Gerenciamento - ListaSidney Penha100% (1)
- Anexo 5 Calculo de Esforco MecanicoDocumento155 páginasAnexo 5 Calculo de Esforco MecanicoandreAinda não há avaliações
- Anéis Elásticos para Eixos Grupo: 504 Tipo: ML Norma: Dimensões: MMDocumento2 páginasAnéis Elásticos para Eixos Grupo: 504 Tipo: ML Norma: Dimensões: MMandrelorandiAinda não há avaliações
- 2019 TopografiaRugosidadeDocumento2 páginas2019 TopografiaRugosidadeMarcos Dantas dos SantosAinda não há avaliações
- Distâncias Mínimas X Tensão Nominal Da Instalação: Cópia Não ControladaDocumento1 páginaDistâncias Mínimas X Tensão Nominal Da Instalação: Cópia Não ControladaPaulo MoreiraAinda não há avaliações
- Medindo O Valor De Pico Para Uma Medição De Gaussímetro Programado No PicNo EverandMedindo O Valor De Pico Para Uma Medição De Gaussímetro Programado No PicAinda não há avaliações
- Telemetria Por Iot Na Plataforma Cayenne Para Medir Amperímetro Com Base No Esp8266 Programado Em ArduinoNo EverandTelemetria Por Iot Na Plataforma Cayenne Para Medir Amperímetro Com Base No Esp8266 Programado Em ArduinoAinda não há avaliações
- Aula 02 - Seção Retangular À Flexão SimplesDocumento30 páginasAula 02 - Seção Retangular À Flexão SimplesRicardo BorgesAinda não há avaliações
- Torquímetros - GEDOREDocumento48 páginasTorquímetros - GEDORELeandro Nobrega BiedmaAinda não há avaliações
- Arquitetura - AçoMadeiras - Aula 3 e 4Documento53 páginasArquitetura - AçoMadeiras - Aula 3 e 4Juciorle SoaresAinda não há avaliações
- Aula 1 - Introdução Ao Concreto Armado Mod UniDocumento41 páginasAula 1 - Introdução Ao Concreto Armado Mod UniJoyce RosaAinda não há avaliações
- Exercícios Outros EnsaiosDocumento3 páginasExercícios Outros EnsaiosrcejrAinda não há avaliações
- 7 Valvula de ControleDocumento291 páginas7 Valvula de ControleCarlos Junior100% (2)
- Equação de Swing - Aula 2Documento9 páginasEquação de Swing - Aula 2Larissa Cavalheiro Cordeiro MotaAinda não há avaliações
- T6Documento8 páginasT6Vitor Joel ChavesAinda não há avaliações
- Manual Inglês ImprimirDocumento89 páginasManual Inglês ImprimirLee BodiniAinda não há avaliações
- Aula Do Capítulo 7 - Livro ESTÁTICADocumento53 páginasAula Do Capítulo 7 - Livro ESTÁTICAALEXANDRE67% (3)
- 2 Aula-NewDocumento29 páginas2 Aula-NewFrancisco CostaAinda não há avaliações
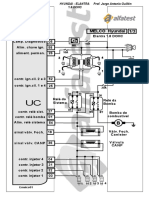
- Hyundai - Elantra 1.6 Dohc - JsalemanDocumento3 páginasHyundai - Elantra 1.6 Dohc - JsalemanLeonardo Molina100% (1)
- Catalogo Normas Tecnicas PetrobrasDocumento20 páginasCatalogo Normas Tecnicas PetrobrasRoberto AlessandroAinda não há avaliações
- Inst Calhas Igus PDFDocumento11 páginasInst Calhas Igus PDFJoao Paiva SantosAinda não há avaliações
- Manual Ar Cond Pac9000 24000ifm8Documento48 páginasManual Ar Cond Pac9000 24000ifm8DONA BINHA DONA BINHAAinda não há avaliações
- Sangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSDocumento2 páginasSangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSasabrancoAinda não há avaliações
- Aula 05 - Fundamentos Da Análise Estrutural (ARQ UFT)Documento19 páginasAula 05 - Fundamentos Da Análise Estrutural (ARQ UFT)Gabriel Luan Paixão MotaAinda não há avaliações
- Calculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoDocumento1.033 páginasCalculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoKARINA MIRANZI NOGEUIRAAinda não há avaliações
- Capitulo 6 IncroperaDocumento60 páginasCapitulo 6 IncroperaRenanAinda não há avaliações
- Accoes Sismicas Sobre Estruturas de SuporteDocumento8 páginasAccoes Sismicas Sobre Estruturas de SuporteJuventino Federico CumbaneAinda não há avaliações
- Frenagem RegenerativaDocumento23 páginasFrenagem RegenerativaFilipe Sousa BarbosaAinda não há avaliações
- Hercules 6 0 PT BRDocumento8 páginasHercules 6 0 PT BRLucas ferreira da silvaAinda não há avaliações
- Capitulo 3.1. Propriedades Mecanicas Dos MateriaisDocumento9 páginasCapitulo 3.1. Propriedades Mecanicas Dos MateriaisGabriel CorreiaAinda não há avaliações
- 11F NL (Teste2 CC) - Nov2021Documento3 páginas11F NL (Teste2 CC) - Nov2021Camila AmaralAinda não há avaliações
- Seção 25Documento41 páginasSeção 25José Roberto VircentsAinda não há avaliações
- Ava Unip - Termodinâmica Aplicada - Questionário Unidade IDocumento4 páginasAva Unip - Termodinâmica Aplicada - Questionário Unidade IEliseu ManoelAinda não há avaliações
- Anexo 06 - Insp Máquinas e Equip EstacionáriosDocumento2 páginasAnexo 06 - Insp Máquinas e Equip EstacionáriosDeivisson DamascenoAinda não há avaliações
- Principio Da TransmissibilidadeDocumento39 páginasPrincipio Da TransmissibilidadetonydenavalAinda não há avaliações
- Teoria de Contato de HertzDocumento62 páginasTeoria de Contato de HertzGustavo PeixotoAinda não há avaliações
- 4 Lista de Exercícios Fenomenos de TransporteDocumento3 páginas4 Lista de Exercícios Fenomenos de TransporteFelipe CalixtoAinda não há avaliações