Você também pode gostar
- As 12 Casas Da VidaDocumento78 páginasAs 12 Casas Da VidaLucilia Lopes100% (1)
- Anatomia Humana UnifatecieDocumento35 páginasAnatomia Humana UnifatecieMariana Adeo83% (6)
- Modelo de PTS para TEADocumento5 páginasModelo de PTS para TEAkaellaprofAinda não há avaliações
- Doenças Cultura Do Milho SafrinhaDocumento13 páginasDoenças Cultura Do Milho SafrinhaMarcos da Silva OliveiraAinda não há avaliações
- The Million Dollar Financial AdvisorDocumento42 páginasThe Million Dollar Financial AdvisorUbirajara Zardini100% (1)
- Atividade 02 - Enf - Fundamentos Das Práticas Integrativas Complementares - 51-2024Documento6 páginasAtividade 02 - Enf - Fundamentos Das Práticas Integrativas Complementares - 51-2024admcavaliniassessoriaAinda não há avaliações
- Plano Completo Da Eletiva 6º B - Via Lactea, Nossa Casa!Documento2 páginasPlano Completo Da Eletiva 6º B - Via Lactea, Nossa Casa!Juliana ViccechiAinda não há avaliações
- Solucao Prova Mestrado 2022 2Documento4 páginasSolucao Prova Mestrado 2022 2Caio ClarindoAinda não há avaliações
- Guia Sector FlorestalDocumento40 páginasGuia Sector FlorestalVictor mendesAinda não há avaliações
- 24-Integal IndefinidaDocumento25 páginas24-Integal IndefinidaTiagoAinda não há avaliações
- Af1 19exrcorDocumento4 páginasAf1 19exrcorPuto Santana0% (1)
- Cálculo II Resumo P1Documento5 páginasCálculo II Resumo P1samirAinda não há avaliações
- Aula 3 - Integral DefinidaDocumento21 páginasAula 3 - Integral DefinidaBenedito GuimarãesAinda não há avaliações
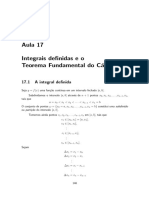
- Aula18 - Integral DefinidaDocumento22 páginasAula18 - Integral DefinidaAbgail PinheiroAinda não há avaliações
- Técnicas de IntegraçãoDocumento72 páginasTécnicas de IntegraçãoLarissa Do ValeAinda não há avaliações
- Padrao de RespostaDocumento4 páginasPadrao de Respostaerivan grangeiroAinda não há avaliações
- Lista - Semana 14Documento4 páginasLista - Semana 14Ana Clara FilgueirasAinda não há avaliações
- Análise Matemática I - Exame de RecursoDocumento2 páginasAnálise Matemática I - Exame de RecursoJaime SilvaAinda não há avaliações
- Roteiro 1 - IntegralDocumento15 páginasRoteiro 1 - IntegralCaio CamioliAinda não há avaliações
- 9-CN - Aula10 - MMQ Introducao e Ajuste LinearDocumento7 páginas9-CN - Aula10 - MMQ Introducao e Ajuste LinearRodolfo Oliveira de SouzaAinda não há avaliações
- Aula 1 - Motivações CalculoDocumento12 páginasAula 1 - Motivações CalculoYasmin MarcelinoAinda não há avaliações
- Aula 9Documento3 páginasAula 9HoltzAinda não há avaliações
- Métodos Numéricos - 7 - Integração NuméricaDocumento38 páginasMétodos Numéricos - 7 - Integração NuméricaAdrian BenevidesAinda não há avaliações
- Rafael Miyazaki Funcoes Geratrizes N3NU RAFAEL MIYAZAKIDocumento5 páginasRafael Miyazaki Funcoes Geratrizes N3NU RAFAEL MIYAZAKIIbilcemAinda não há avaliações
- Semana 3 - Áreas Entre Curvas - o Teorema Do Valor Médio para IntegraisDocumento38 páginasSemana 3 - Áreas Entre Curvas - o Teorema Do Valor Médio para IntegraisValdirene M. FerreiraAinda não há avaliações
- 4-1 Calculo-Integral (1) Integral-DefinidoDocumento3 páginas4-1 Calculo-Integral (1) Integral-Definidocjrg6mm46mAinda não há avaliações
- Aula 4 - Cálculo de ÁreasDocumento6 páginasAula 4 - Cálculo de ÁreasWork WordAinda não há avaliações
- IntegraisDocumento7 páginasIntegraisBruna MorranaAinda não há avaliações
- Capítulo 3 - O Integral e As Suas AplicaçõesDocumento94 páginasCapítulo 3 - O Integral e As Suas AplicaçõesPedro FigueiraAinda não há avaliações
- Calculo1 - Aula17 TFCDocumento13 páginasCalculo1 - Aula17 TFCRoberto NascimentoAinda não há avaliações
- Integrais 2Documento7 páginasIntegrais 2darcfariaAinda não há avaliações
- Integtaiss PDFDocumento38 páginasIntegtaiss PDFOsmar BorgesAinda não há avaliações
- Aula21 - Integral Por PartesDocumento26 páginasAula21 - Integral Por PartesAbgail PinheiroAinda não há avaliações
- P2 Gabarito 2019 1.Documento5 páginasP2 Gabarito 2019 1.Ana FigueiredoAinda não há avaliações
- Resolvendo IntegraisDocumento23 páginasResolvendo IntegraisNinguémAinda não há avaliações
- Primitivas Ou IntegraisDocumento8 páginasPrimitivas Ou IntegraisJacinto FaustinoAinda não há avaliações
- Prova Nivel Universitario OBM 2019Documento2 páginasProva Nivel Universitario OBM 2019Samuel AndradeAinda não há avaliações
- Trabalho Cálculo 2Documento11 páginasTrabalho Cálculo 2Lucas MedeirosAinda não há avaliações
- Apontamentos-9 - Integral Curvilineo-2Documento9 páginasApontamentos-9 - Integral Curvilineo-2Jeremias FernandoAinda não há avaliações
- AD IntegralDefinida Semana1Documento1 páginaAD IntegralDefinida Semana1Matheus Souza Da CostaAinda não há avaliações
- Prova p2 Gab Calc1 2009 1 Eng PDFDocumento3 páginasProva p2 Gab Calc1 2009 1 Eng PDFAna FigueiredoAinda não há avaliações
- Calculo IntegralDocumento18 páginasCalculo IntegralYoussef D. Caculo100% (2)
- Ebook Unidade 4Documento38 páginasEbook Unidade 4Murillo GumieroAinda não há avaliações
- Lista de Aplicação - Semana 14 - SoluçãoDocumento5 páginasLista de Aplicação - Semana 14 - SoluçãoBárbara MourãoAinda não há avaliações
- Lista 5 - IntegralDocumento4 páginasLista 5 - IntegralTiago DantasAinda não há avaliações
- Primitivas Ou AntiderivadasDocumento6 páginasPrimitivas Ou AntiderivadasBrenda CostaAinda não há avaliações
- Comprimento Arco PDFDocumento5 páginasComprimento Arco PDFArthur DaherAinda não há avaliações
- Teorema Da Media Integral IndefinidaDocumento10 páginasTeorema Da Media Integral IndefinidaalmizaelsouzaAinda não há avaliações
- Modulo 12Documento9 páginasModulo 12Daniel marquesAinda não há avaliações
- AM3 16t2corDocumento3 páginasAM3 16t2corrodrigues.profissional55Ainda não há avaliações
- DEMA0304 Estudo ComplementarDocumento1 páginaDEMA0304 Estudo ComplementarHadassa PereiraAinda não há avaliações
- 2022 - FENG - Tema - 1 - Ferramentas Matematicas para o Estudo de FisicaDocumento28 páginas2022 - FENG - Tema - 1 - Ferramentas Matematicas para o Estudo de FisicaBelarmino MatsinheAinda não há avaliações
- Aula 07 - FilipeDocumento15 páginasAula 07 - Filipeniviacs.nsAinda não há avaliações
- Atvidade 7Documento3 páginasAtvidade 7Sr PapiuissAinda não há avaliações
- Exame NormalDocumento7 páginasExame NormalAbrão AntónioAinda não há avaliações
- Trabalho IDocumento3 páginasTrabalho IAbrão AntónioAinda não há avaliações
- TesteDocumento12 páginasTestemaria joao sargentoAinda não há avaliações
- Aula 11 27 MaisExemplosIntegraisDocumento3 páginasAula 11 27 MaisExemplosIntegraisAnna GabrielaAinda não há avaliações
- Re82137 Ny12 Teste 4Documento6 páginasRe82137 Ny12 Teste 4Alice CorreiaAinda não há avaliações
- 26-Cálculo de ÁreasDocumento26 páginas26-Cálculo de ÁreasTiagoAinda não há avaliações
- DERIVADASDocumento14 páginasDERIVADASBruna MorranaAinda não há avaliações
- 2022 - FENG - Tema - 1 - Ferramentas Matematicas para o Estudo de Fisica PDFDocumento28 páginas2022 - FENG - Tema - 1 - Ferramentas Matematicas para o Estudo de Fisica PDFVíctor André MacandzaAinda não há avaliações
- Pauta - Prova - 3 - 2016 - 1 - Sexta MOD2Documento4 páginasPauta - Prova - 3 - 2016 - 1 - Sexta MOD2Carlos EduardoAinda não há avaliações
- Aula No12 Aproximações Lineares e DiferenciaisDocumento6 páginasAula No12 Aproximações Lineares e DiferenciaisMario DuarteAinda não há avaliações
- p2 Calculo 3 17.1Documento3 páginasp2 Calculo 3 17.1Bruno PaivaAinda não há avaliações
- Listão (3 Unidade) PDFDocumento12 páginasListão (3 Unidade) PDFYasmin TelesAinda não há avaliações
- Integrais Duplas - Volume e Integrais Duplas em Regiões Genéricas - Tipo 1Documento13 páginasIntegrais Duplas - Volume e Integrais Duplas em Regiões Genéricas - Tipo 1Willian BernardesAinda não há avaliações
- AULA Slide - OS PRÉ-SOCRÁTICOSDocumento13 páginasAULA Slide - OS PRÉ-SOCRÁTICOSSharley CunhaAinda não há avaliações
- TESTES - ISCED-LuandaDocumento12 páginasTESTES - ISCED-LuandaYamba António Mfulu QI83% (6)
- Apostila Digital Dinossauros 1-3Documento6 páginasApostila Digital Dinossauros 1-3somariananiasilvaAinda não há avaliações
- Trabalho Avaliativo FilosofiaDocumento3 páginasTrabalho Avaliativo FilosofiaadrianiAinda não há avaliações
- Química Lista de Exercícios 5 SEMANADocumento5 páginasQuímica Lista de Exercícios 5 SEMANANatalia RibeiroAinda não há avaliações
- Mono Amanda Prado - Infância e Imaginação Criativa Numa Escola WaldorfDocumento58 páginasMono Amanda Prado - Infância e Imaginação Criativa Numa Escola WaldorfnthaisAinda não há avaliações
- Planilha de Controle de Estoque - REV4Documento648 páginasPlanilha de Controle de Estoque - REV4Ricardo HussenAinda não há avaliações
- 11-Legislação e Normas TécnicasDocumento63 páginas11-Legislação e Normas TécnicasEduardo MarquesAinda não há avaliações
- Art - Alimentacao Coletiva Proenca PDFDocumento11 páginasArt - Alimentacao Coletiva Proenca PDFRose CavalcanteAinda não há avaliações
- Prova 1 ANO - LUGAR TERRITORIO REGIAODocumento1 páginaProva 1 ANO - LUGAR TERRITORIO REGIAOGilckson MourãoAinda não há avaliações
- Como Acessar Os Relatórios de Avaliações - EstudanteDocumento15 páginasComo Acessar Os Relatórios de Avaliações - EstudanteRonaldo Cleberson HutherAinda não há avaliações
- Programação Do Seminário Interdisciplinar de Pesquisa e Extensão 2021 - Campus XxiiiDocumento2 páginasProgramação Do Seminário Interdisciplinar de Pesquisa e Extensão 2021 - Campus XxiiiVinicius MorendeAinda não há avaliações
- Escola Da Vida Resumo - Pesquisa GoogleDocumento1 páginaEscola Da Vida Resumo - Pesquisa GoogleAndreza Félix de AlmeidaAinda não há avaliações
- Anexo Iii - ContratoDocumento5 páginasAnexo Iii - ContratoLeandro CarvalhoAinda não há avaliações
- Jurisprudência Sobre CibercrimeDocumento17 páginasJurisprudência Sobre Cibercrimezx1994Ainda não há avaliações
- Filosofia TarefasDocumento3 páginasFilosofia TarefasMiguel OliveiraAinda não há avaliações
- Currículo Paulista ARTEDocumento37 páginasCurrículo Paulista ARTEGabriel RelichAinda não há avaliações
- Lei 7.515 Sistema Municipal de CulturaDocumento4 páginasLei 7.515 Sistema Municipal de CulturaManu AlbuquerqueAinda não há avaliações
- Ebook - Diversidade e Antidiscriminação 2022 - TJMADocumento271 páginasEbook - Diversidade e Antidiscriminação 2022 - TJMAMARCO ADRIANO RAMOS FONSECAAinda não há avaliações
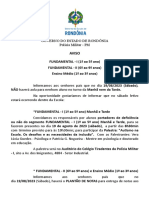
- AVISO GERAL SÁBADO 19 AgostoDocumento2 páginasAVISO GERAL SÁBADO 19 AgostoCleidson DuarteAinda não há avaliações
- Livro PDR Log 2020 PDFDocumento188 páginasLivro PDR Log 2020 PDF1 Batalhao FerroviarioAinda não há avaliações
- Palestra 2 - Extensão de Auditoria InternaDocumento13 páginasPalestra 2 - Extensão de Auditoria InternaMaida CossaAinda não há avaliações