Você também pode gostar
- 0899.4968 Manual Manutenção CFW09 P3 PDFDocumento466 páginas0899.4968 Manual Manutenção CFW09 P3 PDFEraldo Gerolim92% (24)
- Manual Sinus M PortuguêsDocumento217 páginasManual Sinus M PortuguêsRubison Oliveira86% (14)
- SSW-03 Manual de Manutenção SSW03Plus - SSW04Documento172 páginasSSW-03 Manual de Manutenção SSW03Plus - SSW04Adilson Cesar100% (5)
- Parametrização de Inversores ALTIVAR 320 R0Documento71 páginasParametrização de Inversores ALTIVAR 320 R0Lisandro Ribeiro (LRR Manutenção Automotiva)67% (9)
- WEG Cfw500 Manual de ProgramacaoDocumento18 páginasWEG Cfw500 Manual de ProgramacaoDino Oliveira80% (5)
- Siemens Micromaster 430 COM PT 0805Documento51 páginasSiemens Micromaster 430 COM PT 0805Navegador9100% (4)
- Ateísmo No Banco Dos Réus (Louis Markos)Documento237 páginasAteísmo No Banco Dos Réus (Louis Markos)neuemersonAinda não há avaliações
- Erro E00 e F0070 Circular Técnica 1 2020 Solução Do Erro E00 e F0070 No Inversor WEGDocumento3 páginasErro E00 e F0070 Circular Técnica 1 2020 Solução Do Erro E00 e F0070 No Inversor WEGJosé Anderson B.50% (2)
- VW2 CFW11 Baa21235j1Documento37 páginasVW2 CFW11 Baa21235j1Thiago Messias100% (6)
- Toshiba Facility MS 10Documento90 páginasToshiba Facility MS 10Glauber Goncalves83% (6)
- WEG cfw700 Manual de Programacao e Manutencao 10000796176 1.0x Manual Portugues BR PDFDocumento229 páginasWEG cfw700 Manual de Programacao e Manutencao 10000796176 1.0x Manual Portugues BR PDFDaniel De Souza100% (1)
- M - VFD-L DeltaDocumento14 páginasM - VFD-L DeltaHudson Costa67% (3)
- Teste Sem Igbt - CFW700 e 11Documento1 páginaTeste Sem Igbt - CFW700 e 11Roberto Carvalho100% (2)
- Weg Cfw700 BornesDocumento12 páginasWeg Cfw700 BornesJuniorTurca50% (2)
- Manual VFD-M VFD022M23BDocumento32 páginasManual VFD-M VFD022M23BEdmar S J96% (26)
- Manual Santerno Sinus Penta 129Documento373 páginasManual Santerno Sinus Penta 129Anderson Roberto Oliveira100% (1)
- Manual Addtech MC16 PDFDocumento62 páginasManual Addtech MC16 PDFCaroline CoelherAinda não há avaliações
- ATV312-Manual Inversor de FreqDocumento152 páginasATV312-Manual Inversor de FreqAUTHERMIC HVAC&R Climatização e Refrigeração100% (1)
- TOSVERT VF S9 (Fora de Linha) Manual VF S9 em Portugues PDFDocumento202 páginasTOSVERT VF S9 (Fora de Linha) Manual VF S9 em Portugues PDFNorval Santos40% (5)
- CFW500 - R02 InfolevDocumento12 páginasCFW500 - R02 InfolevDiego DiadAinda não há avaliações
- Manual Do CFW 08 WEG V3.6x 11-06-2015Documento152 páginasManual Do CFW 08 WEG V3.6x 11-06-2015Leandro De Paula LeiteAinda não há avaliações
- 02 - Circuitos de Polarização Do Transístor Bipolar (Concluído)Documento218 páginas02 - Circuitos de Polarização Do Transístor Bipolar (Concluído)Victor NascimentoAinda não há avaliações
- Manual de Instrucoes Conversor Frequencia VFnC3 (E6581603) PortuguesDocumento55 páginasManual de Instrucoes Conversor Frequencia VFnC3 (E6581603) PortuguesVinicius Pereira da SilvaAinda não há avaliações
- Atv31 Manual Do UsuarioDocumento99 páginasAtv31 Manual Do UsuarioDscavalcanteAinda não há avaliações
- Manual Operacao 6se32 Ma Ind1asDocumento76 páginasManual Operacao 6se32 Ma Ind1asskaterock1986Ainda não há avaliações
- Manual Commander SK Portugues PDFDocumento54 páginasManual Commander SK Portugues PDFDarci Canal75% (4)
- Manual Do Inversor de Frequência, Modelo V7Documento66 páginasManual Do Inversor de Frequência, Modelo V7Celors100% (1)
- TOSVERT VF S7 (Fora de Linha) Manual VF S7 em PortuguesDocumento25 páginasTOSVERT VF S7 (Fora de Linha) Manual VF S7 em PortuguesFilipe Dias de Oliveira50% (2)
- CFW 11 - ErrosDocumento3 páginasCFW 11 - ErrosJosiasAinda não há avaliações
- WEG CFW 10 Manual Do Usuario 0899.5860 2.2x Manual Portugues BRDocumento110 páginasWEG CFW 10 Manual Do Usuario 0899.5860 2.2x Manual Portugues BRLuis Parra86% (7)
- Manual de Instrucoes CTV45 CTV78Documento28 páginasManual de Instrucoes CTV45 CTV78Claudinei Alves Fonseca33% (3)
- Inversor de Frequencia WEG CFW09Documento328 páginasInversor de Frequencia WEG CFW09Kleriston SantosAinda não há avaliações
- MCX AddtechDocumento36 páginasMCX Addtechcesar oliveiraAinda não há avaliações
- Parametros 20yaskawa 20GA500Documento1 páginaParametros 20yaskawa 20GA500Andre Louis Grangeon75% (4)
- CFW-05 P1Documento116 páginasCFW-05 P1Helder Dos Santos100% (2)
- Manual Inversor Schineider ATV28Documento47 páginasManual Inversor Schineider ATV28marcosaosAinda não há avaliações
- Apostila Fundamentos de IyawoDocumento37 páginasApostila Fundamentos de IyawoaikoputoAinda não há avaliações
- Manual SectronDocumento79 páginasManual Sectrondianadesc100% (1)
- Manual SSW 03 V5.XXDocumento120 páginasManual SSW 03 V5.XXFlavio Andrade83% (6)
- Diagnóstico de Falhas Atlas Red 1 PDFDocumento32 páginasDiagnóstico de Falhas Atlas Red 1 PDFLeoSilva100% (1)
- v1000 PortuguesDocumento302 páginasv1000 PortuguesJanio Oliveira67% (3)
- Guia Rápido de Aplicação - Inversor de Frequência Powerflex 4Documento9 páginasGuia Rápido de Aplicação - Inversor de Frequência Powerflex 4Ronaldo Tourinho100% (1)
- Manual Inversor FR-D700 MitsubishiDocumento36 páginasManual Inversor FR-D700 MitsubishiRoberto cafe100% (4)
- Atv31 Manual Completo BRDocumento102 páginasAtv31 Manual Completo BREmerson Barbosa Saqueti25% (4)
- Manual Infol Fonte FreioDocumento6 páginasManual Infol Fonte FreioJULIOAinda não há avaliações
- Inversor Motor System MS20-BDocumento140 páginasInversor Motor System MS20-BSAGA AUTOMAÇÃO100% (1)
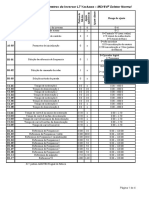
- Parametrização Cimr-L7 Yaskawa Mc16vf 60mDocumento4 páginasParametrização Cimr-L7 Yaskawa Mc16vf 60mLuciano KronhardtAinda não há avaliações
- O Exu DesvendadoDocumento75 páginasO Exu DesvendadoRobson Delfino Genelhoud100% (1)
- Como Configurar o Altivar 71Documento7 páginasComo Configurar o Altivar 71albertocosta1953Ainda não há avaliações
- Catalogo Normas PetrobrasDocumento21 páginasCatalogo Normas PetrobrasAntonioCarlosMontandonJúniorAinda não há avaliações
- Soft Starter 28 - 01Documento62 páginasSoft Starter 28 - 01Jhonatan TavaresAinda não há avaliações
- Delta VFD B Manual PortuguêsDocumento239 páginasDelta VFD B Manual PortuguêsDiego Guimarães100% (1)
- Segurança e Máquinas de Panificação, Mercearia e Açougue. Nota Técnica #94/DSST/MTE/2009Documento20 páginasSegurança e Máquinas de Panificação, Mercearia e Açougue. Nota Técnica #94/DSST/MTE/2009www.cadilhac.com.brAinda não há avaliações
- Toshiba - ms20Documento16 páginasToshiba - ms20Eletronica Repar100% (3)
- Manual Inversor VFDE - PortuguêsDocumento42 páginasManual Inversor VFDE - Portuguêsstgpereira60% (10)
- Manual Simplificado Altivar 31 - PT PDFDocumento18 páginasManual Simplificado Altivar 31 - PT PDFJaime FernandesAinda não há avaliações
- Manual Inversor METALTEX PDFDocumento40 páginasManual Inversor METALTEX PDFJair Zorzi100% (5)
- Atv31 Manual Completo BRDocumento102 páginasAtv31 Manual Completo BRsilviobarrosAinda não há avaliações
- Manual Soft Starter Ats 48 1391708219Documento84 páginasManual Soft Starter Ats 48 1391708219thalestboAinda não há avaliações
- Manual Ats48 PTDocumento83 páginasManual Ats48 PTReinaldo AraujoAinda não há avaliações
- Controlador de Fator de Potencia SIEMENSDocumento29 páginasControlador de Fator de Potencia SIEMENSRafael Franco SilveiraAinda não há avaliações
- WP ContentuploadsManual Inversor ABB ACS350 Ate 30 HP ServiceDrive Fone 19 3012 6360 PDFDocumento318 páginasWP ContentuploadsManual Inversor ABB ACS350 Ate 30 HP ServiceDrive Fone 19 3012 6360 PDFdiegokowalskyAinda não há avaliações
- Manual Técnico de Instalações - AtualizadoDocumento23 páginasManual Técnico de Instalações - Atualizadorenato paullinoAinda não há avaliações
- Controlador de Energia Reativa - Computer 8D PDFDocumento29 páginasControlador de Energia Reativa - Computer 8D PDFPablo JaraAinda não há avaliações
- Implementando Um Soft-starter No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Soft-starter No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Florais, A Energia e A Matéria - Regis S Mesquita de OliveiraDocumento4 páginasFlorais, A Energia e A Matéria - Regis S Mesquita de OliveiraddbraniAinda não há avaliações
- Olimpíada Brasileira de FísicaDocumento6 páginasOlimpíada Brasileira de FísicaJoão CastilhoAinda não há avaliações
- 2022 03 15 18 33 29 65407500 Eletromagnetismo Parte IDocumento90 páginas2022 03 15 18 33 29 65407500 Eletromagnetismo Parte IBruno SilvaAinda não há avaliações
- OF2 - EXEMPLO DE PLANO DE AULA - Circuito SimplesDocumento7 páginasOF2 - EXEMPLO DE PLANO DE AULA - Circuito SimplesLAURA DE SOUZA CARVALHOAinda não há avaliações
- Ponte de WienDocumento6 páginasPonte de WienmaikonlorranAinda não há avaliações
- Motores de Conbustão InternaDocumento46 páginasMotores de Conbustão InternaJoaquim ReisAinda não há avaliações
- Alavancas e Cadeia CineticaDocumento6 páginasAlavancas e Cadeia CineticaYago PessoaAinda não há avaliações
- EM524 - Lista de Exercicios-Cap3Documento4 páginasEM524 - Lista de Exercicios-Cap3MarinaValverdeAinda não há avaliações
- Lista de Exercícios 6 - Circuito e Corrente ContínuaDocumento4 páginasLista de Exercícios 6 - Circuito e Corrente ContínuaDavi BatistaAinda não há avaliações
- 3 Semana Comando IgualDocumento1 página3 Semana Comando IgualKarla Souto de AmorimAinda não há avaliações
- Cinetica LinearDocumento28 páginasCinetica LinearClaudia MaiaAinda não há avaliações
- RefrigeradoresDocumento27 páginasRefrigeradoresNathan S. da RosaAinda não há avaliações
- A Historia Da Educação Física e As Contribuições de João Batista FreireDocumento4 páginasA Historia Da Educação Física e As Contribuições de João Batista FreireCarlos Alberto BatistaAinda não há avaliações
- Plano de Atividade de Gravitação UniversalDocumento4 páginasPlano de Atividade de Gravitação UniversalbentosaboiaAinda não há avaliações
- 03 Ciclo Refrigeracao RefrigerantesDocumento21 páginas03 Ciclo Refrigeracao RefrigerantesrogeriolopesdacostaAinda não há avaliações
- Ensino Fundamental - Educação Física - REPACTUADODocumento11 páginasEnsino Fundamental - Educação Física - REPACTUADOMano CinderAinda não há avaliações
- 4 Lista GasesDocumento4 páginas4 Lista GasesNayara SaldanhaAinda não há avaliações
- Halliday - Física - Vol 2 - 8 Ed - Cap.19Documento32 páginasHalliday - Física - Vol 2 - 8 Ed - Cap.19ivmosousaAinda não há avaliações
- Artigo Casa - Geometria Do HabitarDocumento12 páginasArtigo Casa - Geometria Do HabitarTiago Duarte RézioAinda não há avaliações
- Tabela ANSIDocumento3 páginasTabela ANSIJoão OliveiraAinda não há avaliações
- Tese Lucinaldo BlandttDocumento320 páginasTese Lucinaldo BlandttJheanAinda não há avaliações
- Dissertacao Daniel DamascenoDocumento154 páginasDissertacao Daniel DamascenodanielmsdAinda não há avaliações
- Particle FeverDocumento2 páginasParticle Feverana caetanoAinda não há avaliações
- Plano de Aula Roteiro FichaDocumento3 páginasPlano de Aula Roteiro FichaLaboratzLaboratzAinda não há avaliações