Você também pode gostar
- Microcontroladores: Introdução e ArquiteturaDocumento51 páginasMicrocontroladores: Introdução e ArquiteturaAllas JonyAinda não há avaliações
- Relatorio Motor Gerador CC 1Documento10 páginasRelatorio Motor Gerador CC 1Joao CarvalhoAinda não há avaliações
- Apostila Assembly MIPS Christiane PDFDocumento51 páginasApostila Assembly MIPS Christiane PDFmichael_dougras1325450% (2)
- Teoria Sobre Flip FlopDocumento20 páginasTeoria Sobre Flip FlopursoooAinda não há avaliações
- Microprocesadores vs MicrocontroladoresDocumento16 páginasMicroprocesadores vs MicrocontroladoresLuisCleitonAinda não há avaliações
- Rtos Para Medição De Amperímetro Programado No ArduinoNo EverandRtos Para Medição De Amperímetro Programado No ArduinoAinda não há avaliações
- Automatismos e AutómatosDocumento27 páginasAutomatismos e Autómatosjorginho2Ainda não há avaliações
- Memorial Descritivo Energia SolarDocumento7 páginasMemorial Descritivo Energia Solarmaximo virtual100% (2)
- Cogeração e TrigeraçãoDocumento36 páginasCogeração e TrigeraçãoFábioOliveiraAinda não há avaliações
- Guia de EstudosDocumento59 páginasGuia de EstudosmoreiraviniciAinda não há avaliações
- FET drive simulaçãoDocumento6 páginasFET drive simulaçãoCaio AguiarAinda não há avaliações
- 01 - Introducao - Circuitos DigitaisDocumento11 páginas01 - Introducao - Circuitos DigitaisPedro T V Souza100% (1)
- Aula 1 Design Da InformaçãoDocumento34 páginasAula 1 Design Da InformaçãodeissonAinda não há avaliações
- Sistemas Microcontrolados: PIC, Arduino e Projeto BásicoDocumento23 páginasSistemas Microcontrolados: PIC, Arduino e Projeto BásicoFabrizioLutianeQueirózCunhaAinda não há avaliações
- Ferramentas PC - Pinagem Cabo USB PDFDocumento2 páginasFerramentas PC - Pinagem Cabo USB PDFGerailton Nascimento JoãoAinda não há avaliações
- Introdução aos microcontroladores ArduinoDocumento49 páginasIntrodução aos microcontroladores ArduinoRudnei BarbosaAinda não há avaliações
- O Microcontrolador e Suas CaracterísticasDocumento10 páginasO Microcontrolador e Suas CaracterísticasMelquezedec Alves FlorAinda não há avaliações
- Resumo Sobre SensoresDocumento13 páginasResumo Sobre SensoresCélio JuniorAinda não há avaliações
- Datasheet SIG200-0A0412200 1089794 PTDocumento8 páginasDatasheet SIG200-0A0412200 1089794 PTElian SilvaAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Projeto de fonte regulável de 4V a 12V com CI 723Documento20 páginasProjeto de fonte regulável de 4V a 12V com CI 723Geraldo DiasAinda não há avaliações
- MicrocontroladoresDocumento26 páginasMicrocontroladoresDarlanny Silva DinizAinda não há avaliações
- Relatório Parque EólicoDocumento28 páginasRelatório Parque EólicoFábioOliveira100% (1)
- Livro de Assembly GratuitoDocumento72 páginasLivro de Assembly GratuitoGlasington Bertolacio100% (1)
- Sistema de cálculos de rendimento de transformadores elétricosDocumento26 páginasSistema de cálculos de rendimento de transformadores elétricosIdicacio Gabriela100% (2)
- Apostila - THR12 Parte 1 - Ka Solution PDFDocumento506 páginasApostila - THR12 Parte 1 - Ka Solution PDFRoberto TobioAinda não há avaliações
- Driver MOSFET para motor brushlessDocumento3 páginasDriver MOSFET para motor brushlessdiegoAinda não há avaliações
- Aula 3 - Atendimento - Telefonico - em - Serviços - de - SaúdeDocumento17 páginasAula 3 - Atendimento - Telefonico - em - Serviços - de - SaúdeGraciete PaixãoAinda não há avaliações
- Relatório Parque FotovoltaicoDocumento28 páginasRelatório Parque FotovoltaicoFábioOliveira100% (1)
- Introdução à TV DigitalDocumento32 páginasIntrodução à TV DigitalanneAinda não há avaliações
- Curso Básico de Eletrônica Digital Parte 10Documento8 páginasCurso Básico de Eletrônica Digital Parte 10Thiago_jry100% (2)
- MecatrónicaDocumento8 páginasMecatrónicafranciscoxaviearaujoAinda não há avaliações
- Controle e ServomecanismoDocumento23 páginasControle e ServomecanismoGuilherme Pigato PaesAinda não há avaliações
- Televisão monocromática: introdução histórica e conceitos básicosDocumento77 páginasTelevisão monocromática: introdução histórica e conceitos básicosdinnhow100% (1)
- Manual DVR Modelo HVR V4 CompressedDocumento64 páginasManual DVR Modelo HVR V4 CompressedWillian Batista de SouzaAinda não há avaliações
- 03-Manual de ExperimentosDocumento203 páginas03-Manual de ExperimentosAmaro Da Silva Lopes JúniorAinda não há avaliações
- Circuitos IntegradosDocumento19 páginasCircuitos IntegradosJulio OliveiraAinda não há avaliações
- ChaveadoresDocumento17 páginasChaveadoresJulhao HackerAinda não há avaliações
- DVR Manual Portuguese SeikonDocumento48 páginasDVR Manual Portuguese SeikonFernando MamedeAinda não há avaliações
- Tutorial Kicad 5.1.5 - Revisada 27 - 07 - 2020Documento49 páginasTutorial Kicad 5.1.5 - Revisada 27 - 07 - 2020Paulo VieiraAinda não há avaliações
- Plano de Aula de Sistemas de Comunicações Digitais 2018.2 PDFDocumento3 páginasPlano de Aula de Sistemas de Comunicações Digitais 2018.2 PDFyohfonseca88Ainda não há avaliações
- Sony Bravia Manual PDFDocumento40 páginasSony Bravia Manual PDFmaggu2434Ainda não há avaliações
- Manual MHDX 3008 3016 Portugues 07-17 SiteDocumento101 páginasManual MHDX 3008 3016 Portugues 07-17 SiteLima FilhoAinda não há avaliações
- Micro Control AdoresDocumento143 páginasMicro Control AdoresRogerio Marques MendonçaAinda não há avaliações
- Revista Eletrônica WR 0029Documento26 páginasRevista Eletrônica WR 0029João GimenesAinda não há avaliações
- Introdução À Engenharia ElétricaDocumento15 páginasIntrodução À Engenharia ElétricaelderufsjAinda não há avaliações
- Processamento de sinal digital emDocumento5 páginasProcessamento de sinal digital emRafael AraujoAinda não há avaliações
- Maquina 3 RegistradoresDocumento8 páginasMaquina 3 RegistradoresLorran PegorettiAinda não há avaliações
- Funcionamento de um Oscilador a Cristal ligado a um multiplicador de freqüências (Classe CDocumento16 páginasFuncionamento de um Oscilador a Cristal ligado a um multiplicador de freqüências (Classe CPoliana Tafarelo NascimentoAinda não há avaliações
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Documento22 páginasModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- (Codientu - Org) - TV Toshiba 26HL57 32HL57 37HL57 42HL57Documento114 páginas(Codientu - Org) - TV Toshiba 26HL57 32HL57 37HL57 42HL57BạchKêTinh100% (1)
- Transformação Digital no HospitalDocumento11 páginasTransformação Digital no Hospitalreaders100% (1)
- Relatorio Medidas EletricasDocumento3 páginasRelatorio Medidas EletricaspatideliAinda não há avaliações
- Motores elétricos monofásicosDocumento26 páginasMotores elétricos monofásicosbaixar arquivosAinda não há avaliações
- Circuitos Digitais - Aula 01Documento91 páginasCircuitos Digitais - Aula 01Leandro VelozoAinda não há avaliações
- Servo Biblioteca de Blocos para Simulink Arduino AlvoDocumento8 páginasServo Biblioteca de Blocos para Simulink Arduino AlvoVinicios FerrazAinda não há avaliações
- LG Mp03aa Chassis Rp44na20pa Projection TV SM PDFDocumento46 páginasLG Mp03aa Chassis Rp44na20pa Projection TV SM PDFoscarmdAinda não há avaliações
- Aula - Multiplexação e Múltiplo Acesso (FDM TDM)Documento33 páginasAula - Multiplexação e Múltiplo Acesso (FDM TDM)Filipe MiguelAinda não há avaliações
- Relatório - Exp3 - Programação em VHDL Associada A Kit Experimental - Lógica Programável - Quad5.2Documento11 páginasRelatório - Exp3 - Programação em VHDL Associada A Kit Experimental - Lógica Programável - Quad5.2Fernando Henrique G. ZucatelliAinda não há avaliações
- Estudo da viabilidade econômica de sistema fotovoltaico e luminárias solares no Estádio Nacional de ZimpetoDocumento17 páginasEstudo da viabilidade econômica de sistema fotovoltaico e luminárias solares no Estádio Nacional de ZimpetoezequiasAinda não há avaliações
- Aplicação de MOSFETs em conversores quase-ressonantesDocumento8 páginasAplicação de MOSFETs em conversores quase-ressonantesWesley de PaulaAinda não há avaliações
- Conceito de VlanDocumento100 páginasConceito de VlanDjacir MacielAinda não há avaliações
- Desenvolvimento De Projetos Com Esp32 Programado Em Arduino – Volume ÚnicoNo EverandDesenvolvimento De Projetos Com Esp32 Programado Em Arduino – Volume ÚnicoAinda não há avaliações
- Monitorização de Grandeza Física e Atuação - STM32F4-DiscoveryDocumento14 páginasMonitorização de Grandeza Física e Atuação - STM32F4-DiscoveryFábioOliveiraAinda não há avaliações
- Monografia - Nanorobótica-Desafios e AplicaçõesDocumento39 páginasMonografia - Nanorobótica-Desafios e AplicaçõesFábioOliveiraAinda não há avaliações
- Relatório Colectores Solares de Tubos de VácuoDocumento10 páginasRelatório Colectores Solares de Tubos de VácuoFábioOliveiraAinda não há avaliações
- Relatório Baterias de Zinco Primárias Baterias de Lítio PrimáriasDocumento22 páginasRelatório Baterias de Zinco Primárias Baterias de Lítio PrimáriasFábioOliveiraAinda não há avaliações
- Controlador SolarDocumento18 páginasControlador SolarFábioOliveiraAinda não há avaliações
- Sistemas de Ar Comprimido - Resolução de Um Caso PráticoDocumento43 páginasSistemas de Ar Comprimido - Resolução de Um Caso PráticoFábioOliveira0% (1)
- Orientações para AV1Documento3 páginasOrientações para AV1Gabriel OliveiraAinda não há avaliações
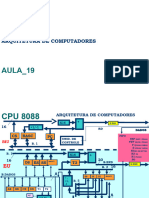
- Aula - Ac - 19 - GravDocumento20 páginasAula - Ac - 19 - GravCharles ChavesAinda não há avaliações
- Soft skills na Indústria 4.0Documento2 páginasSoft skills na Indústria 4.0VALERIA MARIA DE OLIVEIRA DA SILVAAinda não há avaliações
- Inversor de String Trifásico 15-30 KW: CSI-15K-T220 - CSI-20K-T220 CSI-25K-T220 - CSI-30K-T220Documento2 páginasInversor de String Trifásico 15-30 KW: CSI-15K-T220 - CSI-20K-T220 CSI-25K-T220 - CSI-30K-T220Luana PereiraAinda não há avaliações
- Marketing André BarbosaDocumento12 páginasMarketing André BarbosaAndréAinda não há avaliações
- Como Instalar e Licenciar o Microsoft Office 2019Documento5 páginasComo Instalar e Licenciar o Microsoft Office 2019maiquelviniciusAinda não há avaliações
- Projeto de máquinas e materiaisDocumento7 páginasProjeto de máquinas e materiaisrogersampaiocosta-1Ainda não há avaliações
- Duto corrugado PEAD: ficha técnica de produtoDocumento2 páginasDuto corrugado PEAD: ficha técnica de produtoLeal PlasticAinda não há avaliações
- Ficha Reforço Nº6 Monomios PolinomiosDocumento7 páginasFicha Reforço Nº6 Monomios PolinomiosTeresa CoimbraAinda não há avaliações
- Pc78us-8 (KPBM0454304)Documento1.015 páginasPc78us-8 (KPBM0454304)julianoAinda não há avaliações
- Aplicações da Bioestatística na SaúdeDocumento1 páginaAplicações da Bioestatística na SaúdeBruno BezerraAinda não há avaliações
- Dellazari Gabriel Senger 2023 TCCDocumento86 páginasDellazari Gabriel Senger 2023 TCCGabriel RibeiroAinda não há avaliações
- GMDSS Sistema Global de Socorro e Segurança MarítimaDocumento36 páginasGMDSS Sistema Global de Socorro e Segurança MarítimaMarcelo KonzenAinda não há avaliações
- Mapa ModbusDocumento5 páginasMapa ModbusKarelBissetHechavarriaAinda não há avaliações
- Aplicação ADO.NET no SIGEMUDocumento15 páginasAplicação ADO.NET no SIGEMUamandiosousaAinda não há avaliações
- Atividade 4check - Jeff. ADocumento2 páginasAtividade 4check - Jeff. AMarcelo Donizete do ValleAinda não há avaliações
- Apostila PowerPoint paraDocumento52 páginasApostila PowerPoint paraAdemilton Rodrigues de OliveiraAinda não há avaliações
- Procedimento de EnvioDocumento2 páginasProcedimento de EnvioAlexandre CostaAinda não há avaliações
- Manual Fortes Web Modulo PessoalDocumento94 páginasManual Fortes Web Modulo PessoalEverton Muller BelarminoAinda não há avaliações
- Elaboração de Um Painel Gerencial para Apoio À Tomada de DecisãoDocumento36 páginasElaboração de Um Painel Gerencial para Apoio À Tomada de DecisãoEndersonAinda não há avaliações
- M9 PSI (Revisões)Documento6 páginasM9 PSI (Revisões)Gonçalo RebouçoAinda não há avaliações
- Aula 5Documento5 páginasAula 5Thawanny de CarvalhoAinda não há avaliações
- Ergonomia e Design: conforto, prazer e risco no uso de produtosDocumento15 páginasErgonomia e Design: conforto, prazer e risco no uso de produtosRoberta FidellisAinda não há avaliações
- 01-Carta Convite Klabin ZCN 13783Documento3 páginas01-Carta Convite Klabin ZCN 13783Grac ServiçosAinda não há avaliações
- Guia Do PAVE 2023 Rev01 1Documento12 páginasGuia Do PAVE 2023 Rev01 1Wesley Matheus HolzAinda não há avaliações