Você também pode gostar
- Inventario de Maquinas NR 12 MarcenariaDocumento15 páginasInventario de Maquinas NR 12 MarcenariaAndréLuizMatosCastro100% (2)
- Modelo de Manual Do Proprietário TENDA PDFDocumento78 páginasModelo de Manual Do Proprietário TENDA PDFLuciano CabralAinda não há avaliações
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- Injetora MedradDocumento4 páginasInjetora MedrademersonsjcAinda não há avaliações
- FQ 44 - Descrição de Cargos Gerente de ProduçãoDocumento2 páginasFQ 44 - Descrição de Cargos Gerente de Produçãomagcaval100% (5)
- T 27 EMB 312 Tucano Procedimentos Normais 23 Out 2005Documento33 páginasT 27 EMB 312 Tucano Procedimentos Normais 23 Out 2005alam77100% (3)
- Envolvedoras - Rev01 03.16Documento6 páginasEnvolvedoras - Rev01 03.16Henrique CirinoAinda não há avaliações
- AS01, AS02 e AS03 - Criar, Alterar, Excluir ImobilizadoDocumento12 páginasAS01, AS02 e AS03 - Criar, Alterar, Excluir ImobilizadoClaudioSerpaAinda não há avaliações
- MF4291Documento2 páginasMF4291Julio César Talledo De Lama0% (1)
- Livro Gestão de Projetos Voltados Ao Setor PúblicoDocumento184 páginasLivro Gestão de Projetos Voltados Ao Setor PúblicoCesar HeningAinda não há avaliações
- Norma Europeia de Iluminacao Publica en 13201Documento11 páginasNorma Europeia de Iluminacao Publica en 13201Diogo DuarteAinda não há avaliações
- Atlas CopcoDocumento20 páginasAtlas Copcofernando triade100% (2)
- Lista 1 - FOOO PDFDocumento6 páginasLista 1 - FOOO PDFLucas JordãoAinda não há avaliações
- Aula19 CSLDocumento14 páginasAula19 CSLirismoraesAinda não há avaliações
- Aula20 CSL PDFDocumento21 páginasAula20 CSL PDFLucas JordãoAinda não há avaliações
- Aula22 CSLDocumento24 páginasAula22 CSLAlex_sfAinda não há avaliações
- Aula18 CSL PDFDocumento21 páginasAula18 CSL PDFLucas JordãoAinda não há avaliações
- Aula21 CSLDocumento28 páginasAula21 CSLJeferson FraytagAinda não há avaliações
- Aula16 CSL PDFDocumento17 páginasAula16 CSL PDFLucas JordãoAinda não há avaliações
- Aula17 CSL PDFDocumento4 páginasAula17 CSL PDFLucas JordãoAinda não há avaliações
- Aula13 CSL PDFDocumento21 páginasAula13 CSL PDFLucas JordãoAinda não há avaliações
- Aula14 CSLDocumento18 páginasAula14 CSLMauri GauerAinda não há avaliações
- Aula8 CSL PDFDocumento18 páginasAula8 CSL PDFLucas JordãoAinda não há avaliações
- Aula12 CSL PDFDocumento30 páginasAula12 CSL PDFLucas JordãoAinda não há avaliações
- Aula3 CSLDocumento29 páginasAula3 CSLfukinhaAinda não há avaliações
- Aula9 CSL PDFDocumento28 páginasAula9 CSL PDFLucas JordãoAinda não há avaliações
- Aula11 CSL PDFDocumento13 páginasAula11 CSL PDFLucas JordãoAinda não há avaliações
- Aula0 CSLDocumento21 páginasAula0 CSLisaacAinda não há avaliações
- Aula7 CSL PDFDocumento27 páginasAula7 CSL PDFLucas JordãoAinda não há avaliações
- RouthDocumento22 páginasRouthAdriano Francisco PedroAinda não há avaliações
- Aula10 CSL PDFDocumento23 páginasAula10 CSL PDFLucas JordãoAinda não há avaliações
- Aula5 CSLDocumento26 páginasAula5 CSLLucas JordãoAinda não há avaliações
- Aula2 CSL PDFDocumento26 páginasAula2 CSL PDFLucas JordãoAinda não há avaliações
- Aula1 CSL PDFDocumento18 páginasAula1 CSL PDFLucas JordãoAinda não há avaliações
- Rl2455hm ManualusuarioDocumento49 páginasRl2455hm ManualusuarioLucas JordãoAinda não há avaliações
- Projeto de Um SPDADocumento122 páginasProjeto de Um SPDADaniel SantanaAinda não há avaliações
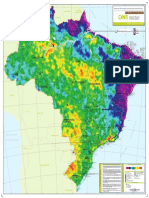
- Mapa Densidade Descargas Atmosfericas - 1998-2013 - PDFDocumento1 páginaMapa Densidade Descargas Atmosfericas - 1998-2013 - PDFLucas JordãoAinda não há avaliações
- Lista 8 PDFDocumento1 páginaLista 8 PDFLucas JordãoAinda não há avaliações
- 3 Planejamento Energético - Uma Visão GeralDocumento15 páginas3 Planejamento Energético - Uma Visão GeralLucas JordãoAinda não há avaliações
- Expedição de MateriaisDocumento11 páginasExpedição de MateriaisbiaAinda não há avaliações
- Descritivo VELTRACDocumento5 páginasDescritivo VELTRACDavi CoutoAinda não há avaliações
- Manual LabquestDocumento22 páginasManual LabquestThiago Ferraz100% (1)
- Plano de Ensino - Contabilidade e Custos Da Produção - 2018-1Documento2 páginasPlano de Ensino - Contabilidade e Custos Da Produção - 2018-1ecavalheiroAinda não há avaliações
- Manual Construtora Portinari 12Documento13 páginasManual Construtora Portinari 12Eisla BarbosaAinda não há avaliações
- Hastings - Anel PistaoDocumento40 páginasHastings - Anel Pistaorivoltaleandro100% (3)
- Manual Uso TQC 400Documento13 páginasManual Uso TQC 400Randy JacksonAinda não há avaliações
- Diagrama de ColaboraçãoDocumento16 páginasDiagrama de ColaboraçãoWilliam FernandesAinda não há avaliações
- Arquitetura - CortesDocumento43 páginasArquitetura - CortesEliezerAinda não há avaliações
- Engarrafamento em ArembepeDocumento8 páginasEngarrafamento em ArembepeRoberval OliveiraAinda não há avaliações
- Estoques - ContabilidadeDocumento59 páginasEstoques - ContabilidadeRafael OliveiraAinda não há avaliações
- Fiat - Imprima Seu CarroDocumento4 páginasFiat - Imprima Seu CarroguevarazAinda não há avaliações
- Manual Proprietario Escadas Esteiras 2020Documento16 páginasManual Proprietario Escadas Esteiras 2020Carlos WillamsAinda não há avaliações
- VagasDocumento18 páginasVagasJorge FernandoAinda não há avaliações
- Catalogo Industrial Soprano DLDocumento12 páginasCatalogo Industrial Soprano DLLeonardo Lisbôa KnüppeAinda não há avaliações
- Estratégia Corporativa - ChevroletDocumento7 páginasEstratégia Corporativa - Chevroletfabiano hanzenAinda não há avaliações
- UsinagemDocumento74 páginasUsinagemAshley DeanAinda não há avaliações
- 02 Prova Analista EngSoftware Cespe 2011 Ebc Analista Engenharia de Software ProvaDocumento4 páginas02 Prova Analista EngSoftware Cespe 2011 Ebc Analista Engenharia de Software ProvaMartony SilvaAinda não há avaliações
- Universidade CeumaDocumento5 páginasUniversidade CeumaMatheus Henrique BarbosaAinda não há avaliações