Você também pode gostar
- Aula23 CSL PDFDocumento17 páginasAula23 CSL PDFLucas JordãoAinda não há avaliações
- Aula20 CSL PDFDocumento21 páginasAula20 CSL PDFLucas JordãoAinda não há avaliações
- Aula16 CSL PDFDocumento17 páginasAula16 CSL PDFLucas JordãoAinda não há avaliações
- Aula19 CSLDocumento14 páginasAula19 CSLirismoraesAinda não há avaliações
- Aula21 CSLDocumento28 páginasAula21 CSLJeferson FraytagAinda não há avaliações
- Aula22 CSLDocumento24 páginasAula22 CSLAlex_sfAinda não há avaliações
- Lista 1 - FOOO PDFDocumento6 páginasLista 1 - FOOO PDFLucas JordãoAinda não há avaliações
- Aula18 CSL PDFDocumento21 páginasAula18 CSL PDFLucas JordãoAinda não há avaliações
- Aula14 CSLDocumento18 páginasAula14 CSLMauri GauerAinda não há avaliações
- Aula8 CSL PDFDocumento18 páginasAula8 CSL PDFLucas JordãoAinda não há avaliações
- Aula13 CSL PDFDocumento21 páginasAula13 CSL PDFLucas JordãoAinda não há avaliações
- Aula7 CSL PDFDocumento27 páginasAula7 CSL PDFLucas JordãoAinda não há avaliações
- Aula3 CSLDocumento29 páginasAula3 CSLfukinhaAinda não há avaliações
- Aula12 CSL PDFDocumento30 páginasAula12 CSL PDFLucas JordãoAinda não há avaliações
- Aula17 CSL PDFDocumento4 páginasAula17 CSL PDFLucas JordãoAinda não há avaliações
- Aula9 CSL PDFDocumento28 páginasAula9 CSL PDFLucas JordãoAinda não há avaliações
- RouthDocumento22 páginasRouthAdriano Francisco PedroAinda não há avaliações
- Aula1 CSL PDFDocumento18 páginasAula1 CSL PDFLucas JordãoAinda não há avaliações
- Lista 8 PDFDocumento1 páginaLista 8 PDFLucas JordãoAinda não há avaliações
- Aula2 CSL PDFDocumento26 páginasAula2 CSL PDFLucas JordãoAinda não há avaliações
- Aula10 CSL PDFDocumento23 páginasAula10 CSL PDFLucas JordãoAinda não há avaliações
- Aula5 CSLDocumento26 páginasAula5 CSLLucas JordãoAinda não há avaliações
- Aula0 CSLDocumento21 páginasAula0 CSLisaacAinda não há avaliações
- Rl2455hm ManualusuarioDocumento49 páginasRl2455hm ManualusuarioLucas JordãoAinda não há avaliações
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- 3 Planejamento Energético - Uma Visão GeralDocumento15 páginas3 Planejamento Energético - Uma Visão GeralLucas JordãoAinda não há avaliações
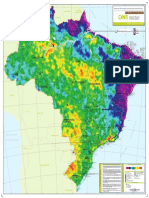
- Mapa Densidade Descargas Atmosfericas - 1998-2013 - PDFDocumento1 páginaMapa Densidade Descargas Atmosfericas - 1998-2013 - PDFLucas JordãoAinda não há avaliações
- Projeto de Um SPDADocumento122 páginasProjeto de Um SPDADaniel SantanaAinda não há avaliações
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- Introdução Aos Polímeros PDFDocumento56 páginasIntrodução Aos Polímeros PDFDiego Arturo PintoAinda não há avaliações
- Multimedidor Idm96 AbbDocumento3 páginasMultimedidor Idm96 AbbLuciano Henrique Vitorio0% (1)
- TabelasDimensionamento Versao 1 Nov2009 Colocada Conteudos 8230Documento76 páginasTabelasDimensionamento Versao 1 Nov2009 Colocada Conteudos 8230SergioRamosAinda não há avaliações
- Polimig Apostila Eletricidade VitualDocumento112 páginasPolimig Apostila Eletricidade VitualEuripes AlvesAinda não há avaliações
- 264 602 07 Sistemas Eléctricos Electrónicos de Veículos LigeirosDocumento124 páginas264 602 07 Sistemas Eléctricos Electrónicos de Veículos LigeirosNelson Lima100% (7)
- Avaliação Dos Riscos ISATURDocumento97 páginasAvaliação Dos Riscos ISATURLaura SantosAinda não há avaliações
- Lista de Exercicios Do 4 Bim Do 2 Ano Do EM MagnetismoDocumento4 páginasLista de Exercicios Do 4 Bim Do 2 Ano Do EM MagnetismoFabrício AmorimAinda não há avaliações
- Separação de CompostosDocumento4 páginasSeparação de CompostosNaihara WachterAinda não há avaliações
- Exercicios Estatistica BioestatisticaDocumento10 páginasExercicios Estatistica Bioestatisticaapi-3724336Ainda não há avaliações
- Movimento Circular Uniforme e SatélitesDocumento2 páginasMovimento Circular Uniforme e SatélitesTânia AlvesAinda não há avaliações
- Eco-Box Uno Mile PDFDocumento3 páginasEco-Box Uno Mile PDFPaulo LaraAinda não há avaliações
- Circuito Elétrico Dos Caminhões MBDocumento3 páginasCircuito Elétrico Dos Caminhões MBcbmanausAinda não há avaliações
- Noções Básicas de EletricidadeDocumento25 páginasNoções Básicas de EletricidadeFabrício Tomaz Jamaica100% (1)
- 2 - Como A Agua AqueceDocumento4 páginas2 - Como A Agua AqueceFabiaoSergioMacamoAinda não há avaliações
- 01 Condutos - Generalidades PDFDocumento18 páginas01 Condutos - Generalidades PDFjoaoengAinda não há avaliações
- Escalonamento LinearDocumento1 páginaEscalonamento LinearDavid Da Silva BorgesAinda não há avaliações
- Volume 03Documento10 páginasVolume 03orivalmedeiros100% (2)
- Pára RaiosDocumento21 páginasPára Raiosalbertoc1953Ainda não há avaliações
- Fasores Capitulo 6Documento9 páginasFasores Capitulo 6Denilson SilvaAinda não há avaliações
- Exercicios DinamicaDocumento7 páginasExercicios DinamicadiegoarleyAinda não há avaliações
- Apresentação Av1 RedesDocumento22 páginasApresentação Av1 RedesEmanuel VeigaAinda não há avaliações
- Apontamentos de Carta de Motociclos: Categoria ADocumento10 páginasApontamentos de Carta de Motociclos: Categoria ADaniel Fung de SousaAinda não há avaliações
- Tecnologia Textil II - CorteDocumento99 páginasTecnologia Textil II - CorteDavid Lins de OliveiraAinda não há avaliações
- Microsoft Power Point - Qualidade de Imagem em Radiologia Convencional (Modo de CompatibilidadeDocumento33 páginasMicrosoft Power Point - Qualidade de Imagem em Radiologia Convencional (Modo de CompatibilidadeMaria Lucia Lima soares100% (3)
- (Dornélio) Exercícios - InterpolaçãoDocumento4 páginas(Dornélio) Exercícios - InterpolaçãoRobson Dorival CordeiroAinda não há avaliações
- Lista - 1 Aerodinamica Karl Peter BurrDocumento2 páginasLista - 1 Aerodinamica Karl Peter BurrpipoldchapAinda não há avaliações
- ATEX Medidas Prevencao e ProtecaoDocumento9 páginasATEX Medidas Prevencao e ProtecaoRenata ScoralickAinda não há avaliações
- Ansys CFDDocumento17 páginasAnsys CFDrodrigoq1100% (1)
- Convertidor SEPIC PDFDocumento23 páginasConvertidor SEPIC PDFDámaso González BarreraAinda não há avaliações