Você também pode gostar
- Lista 1 - FOOO PDFDocumento6 páginasLista 1 - FOOO PDFLucas JordãoAinda não há avaliações
- Aula20 CSL PDFDocumento21 páginasAula20 CSL PDFLucas JordãoAinda não há avaliações
- Aula18 CSL PDFDocumento21 páginasAula18 CSL PDFLucas JordãoAinda não há avaliações
- Aula23 CSL PDFDocumento17 páginasAula23 CSL PDFLucas JordãoAinda não há avaliações
- Aula22 CSLDocumento24 páginasAula22 CSLAlex_sfAinda não há avaliações
- Aula19 CSLDocumento14 páginasAula19 CSLirismoraesAinda não há avaliações
- Aula21 CSLDocumento28 páginasAula21 CSLJeferson FraytagAinda não há avaliações
- Aula8 CSL PDFDocumento18 páginasAula8 CSL PDFLucas JordãoAinda não há avaliações
- Aula16 CSL PDFDocumento17 páginasAula16 CSL PDFLucas JordãoAinda não há avaliações
- Aula13 CSL PDFDocumento21 páginasAula13 CSL PDFLucas JordãoAinda não há avaliações
- Aula3 CSLDocumento29 páginasAula3 CSLfukinhaAinda não há avaliações
- Aula12 CSL PDFDocumento30 páginasAula12 CSL PDFLucas JordãoAinda não há avaliações
- Aula14 CSLDocumento18 páginasAula14 CSLMauri GauerAinda não há avaliações
- Aula9 CSL PDFDocumento28 páginasAula9 CSL PDFLucas JordãoAinda não há avaliações
- Aula11 CSL PDFDocumento13 páginasAula11 CSL PDFLucas JordãoAinda não há avaliações
- Aula0 CSLDocumento21 páginasAula0 CSLisaacAinda não há avaliações
- Aula7 CSL PDFDocumento27 páginasAula7 CSL PDFLucas JordãoAinda não há avaliações
- RouthDocumento22 páginasRouthAdriano Francisco PedroAinda não há avaliações
- Aula10 CSL PDFDocumento23 páginasAula10 CSL PDFLucas JordãoAinda não há avaliações
- Aula5 CSLDocumento26 páginasAula5 CSLLucas JordãoAinda não há avaliações
- Aula2 CSL PDFDocumento26 páginasAula2 CSL PDFLucas JordãoAinda não há avaliações
- Aula1 CSL PDFDocumento18 páginasAula1 CSL PDFLucas JordãoAinda não há avaliações
- Rl2455hm ManualusuarioDocumento49 páginasRl2455hm ManualusuarioLucas JordãoAinda não há avaliações
- Projeto de Um SPDADocumento122 páginasProjeto de Um SPDADaniel SantanaAinda não há avaliações
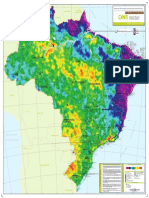
- Mapa Densidade Descargas Atmosfericas - 1998-2013 - PDFDocumento1 páginaMapa Densidade Descargas Atmosfericas - 1998-2013 - PDFLucas JordãoAinda não há avaliações
- Lista 8 PDFDocumento1 páginaLista 8 PDFLucas JordãoAinda não há avaliações
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- 3 Planejamento Energético - Uma Visão GeralDocumento15 páginas3 Planejamento Energético - Uma Visão GeralLucas JordãoAinda não há avaliações
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- Pequeno Manual de Instalacoes Eletricas em Atmosferas Potencialmente Explosivas-9788521206866 PDFDocumento24 páginasPequeno Manual de Instalacoes Eletricas em Atmosferas Potencialmente Explosivas-9788521206866 PDFfrancotab100% (1)
- Energia Solar - Respostas Dos ExerciciosDocumento23 páginasEnergia Solar - Respostas Dos ExerciciosRoger RogerAinda não há avaliações
- 16 Ondas IDocumento29 páginas16 Ondas Ijean carlo rabello venancioAinda não há avaliações
- 37 - Madeiras Na Construção Civil PDFDocumento32 páginas37 - Madeiras Na Construção Civil PDFRicardo Thiessen100% (1)
- Material4 - Propriedade e Comportamento Dos MateriaisDocumento71 páginasMaterial4 - Propriedade e Comportamento Dos MateriaisDIEGO LIMAAinda não há avaliações
- Apostila REsistência Dos MateriaisDocumento15 páginasApostila REsistência Dos MateriaisEspeto Gato GordoAinda não há avaliações
- Exercicios Impar Elon PDFDocumento125 páginasExercicios Impar Elon PDFAlisson Lucas de Souza100% (1)
- Exercícios de Ângulo e Ângulos Formados Por Retas Paralelas EEAR Questões de Provas AnterioresDocumento2 páginasExercícios de Ângulo e Ângulos Formados Por Retas Paralelas EEAR Questões de Provas AnterioresSandroMMCAinda não há avaliações
- Apostila de Avaliação de ImovéisDocumento118 páginasApostila de Avaliação de ImovéisKleber Marcelo Carvalho0% (1)
- Descritivo de Instalação, Operação e ManutençãoDocumento61 páginasDescritivo de Instalação, Operação e ManutençãoSamoel De MeloAinda não há avaliações
- Vasos de PressãoDocumento31 páginasVasos de PressãoGlauco Domingues de MelloAinda não há avaliações
- Manual TD 160 TD 1060 Versao 2012 PDFDocumento22 páginasManual TD 160 TD 1060 Versao 2012 PDFMário Silva NetoAinda não há avaliações
- PC200-6B - Manual de Oficina em PortuguêsDocumento780 páginasPC200-6B - Manual de Oficina em PortuguêsJoao Leno Rodrigues Santos80% (20)
- Atividade Prática - Projeto Civil Auxiliado Por Computador - Certificação TécnicaDocumento2 páginasAtividade Prática - Projeto Civil Auxiliado Por Computador - Certificação TécnicaadmcavaliniassessoriaAinda não há avaliações
- Análise Numérica de Um Perfil Aerodinâmico Utilizando A Plataforma OpenFOAMDocumento12 páginasAnálise Numérica de Um Perfil Aerodinâmico Utilizando A Plataforma OpenFOAMCesar AlmeidaAinda não há avaliações
- Compressor EsDocumento29 páginasCompressor EsAndré GuilhermeAinda não há avaliações
- Secagem de Materiais - Física Industrial - Aula 1Documento14 páginasSecagem de Materiais - Física Industrial - Aula 1Dayane FaleiroAinda não há avaliações
- TI NspireDocumento8 páginasTI NspireAnonymous huFC3IUAinda não há avaliações
- 5 Transformação Digital Internet Das Coisas IoT Big Data InteligênciaDocumento9 páginas5 Transformação Digital Internet Das Coisas IoT Big Data InteligênciaMariana Alves de CastroAinda não há avaliações
- Xtream 1.60Documento2 páginasXtream 1.60luciusmonaAinda não há avaliações
- Atividades Energias ConservativasDocumento8 páginasAtividades Energias ConservativasLuiz Henrique FerreiraAinda não há avaliações
- Exercício Da Unidade VIIDocumento5 páginasExercício Da Unidade VIIDaniel GiraoAinda não há avaliações
- Manual de Obras-Hidraulicas 2014 PDFDocumento135 páginasManual de Obras-Hidraulicas 2014 PDFamussual100% (2)
- Avaliação Sobre Prismas e PirâmidesDocumento4 páginasAvaliação Sobre Prismas e PirâmidesWatila Porto SilvaAinda não há avaliações
- Ciencias 30-10-23Documento9 páginasCiencias 30-10-23bininha89Ainda não há avaliações
- Trabalho FresaDocumento9 páginasTrabalho Fresaluis guilherme ramosAinda não há avaliações
- Danielle Raphaela Voltolini - Areia Verde - GRR20091752Documento30 páginasDanielle Raphaela Voltolini - Areia Verde - GRR20091752Gustavo NeresAinda não há avaliações
- Curvas de BombasDocumento22 páginasCurvas de BombasallanAinda não há avaliações
- Lighting Systems and Associated Electromagnetic RadiationDocumento4 páginasLighting Systems and Associated Electromagnetic RadiationMarcio Antonio SensAinda não há avaliações