Você também pode gostar
- 9098Documento36 páginas9098Rodrigo Freitas86% (7)
- Eletrica L200 Sport HPEDocumento175 páginasEletrica L200 Sport HPEMiguel Oyarzabal100% (3)
- Parte elétrica e dispositivos elétricos da NR 12: conceitos básicos e fundamentais para a compreensão da normaNo EverandParte elétrica e dispositivos elétricos da NR 12: conceitos básicos e fundamentais para a compreensão da normaNota: 5 de 5 estrelas5/5 (3)
- RESUMO - Manual Sobre Planejamento Da Distribuição - RONEYDocumento12 páginasRESUMO - Manual Sobre Planejamento Da Distribuição - RONEYdjmer6Ainda não há avaliações
- Tabela Barramento Chato Cobre 1391708219Documento1 páginaTabela Barramento Chato Cobre 1391708219Luciano Elias de Senna50% (2)
- Geafol Diretrizes de InstalaçãoDocumento24 páginasGeafol Diretrizes de InstalaçãojullianofariaAinda não há avaliações
- Lista de 50 Códigos Secretos para AndroidDocumento4 páginasLista de 50 Códigos Secretos para AndroidEdu AssisAinda não há avaliações
- Apostila - Qualidade EnergiaDocumento129 páginasApostila - Qualidade EnergiaLuciano Porto de LimaAinda não há avaliações
- Qualidade Energia Fundamentos BasicosDocumento130 páginasQualidade Energia Fundamentos BasicosMarcos S.'.Ainda não há avaliações
- Conceitos Gerais Sobre Qualidade Da EnergiaDocumento7 páginasConceitos Gerais Sobre Qualidade Da EnergiaGustavo EloiAinda não há avaliações
- Trabalho de Set MinistraDocumento18 páginasTrabalho de Set MinistraPiedade Nsd LopesAinda não há avaliações
- Afundamentos PDFDocumento25 páginasAfundamentos PDFÁtila de LucaAinda não há avaliações
- TCC - Análise de Distúrbios Elétricos Na Qualidade de Energia Na Rubro CalçadosDocumento22 páginasTCC - Análise de Distúrbios Elétricos Na Qualidade de Energia Na Rubro CalçadosmurillohdeclAinda não há avaliações
- Qualidade Da Energia Eletrica 2010Documento111 páginasQualidade Da Energia Eletrica 2010Luiz EduardoAinda não há avaliações
- Regulador DE Tensão Monófasico Aplicação EM Redes DE Distribuição de Energia ElétricaDocumento27 páginasRegulador DE Tensão Monófasico Aplicação EM Redes DE Distribuição de Energia ElétricaCanal Sem nomeAinda não há avaliações
- Portfólio - Qualidade Da Energia Elétrica - Gabriel Flores AquinoDocumento18 páginasPortfólio - Qualidade Da Energia Elétrica - Gabriel Flores AquinoBruno PiresAinda não há avaliações
- Relatório 7 - CVRT - Kelly Machado - 12011EAU026Documento7 páginasRelatório 7 - CVRT - Kelly Machado - 12011EAU026Kelly Cristina Félix MachadoAinda não há avaliações
- Cap. 03 QEE Fontes Geradora de Disturbios Na QEE MAIO 2023-02 Verso 04Documento89 páginasCap. 03 QEE Fontes Geradora de Disturbios Na QEE MAIO 2023-02 Verso 04Fernanda MedeirosAinda não há avaliações
- Qualidade Da Energia ApostilaDocumento37 páginasQualidade Da Energia ApostilaRaquel Piedade100% (1)
- Analise de Energia EletricaDocumento60 páginasAnalise de Energia EletricaCarlyson SilvaAinda não há avaliações
- Qualidade de Energia EMF ENGENHARIADocumento15 páginasQualidade de Energia EMF ENGENHARIAMendes Orlando BanzeAinda não há avaliações
- Qualidade de Energia - Causas Efeitos e Soluções.Documento11 páginasQualidade de Energia - Causas Efeitos e Soluções.Thatiane Cristina Dos SantosAinda não há avaliações
- Qualidade de Energia Causas, Efeitos e Soluções. Autor - Edgard Franco.Documento11 páginasQualidade de Energia Causas, Efeitos e Soluções. Autor - Edgard Franco.Rayane FrancoAinda não há avaliações
- Qualidade de Energia - Causas, Efeitos e SoluçõesDocumento12 páginasQualidade de Energia - Causas, Efeitos e SoluçõesEudes AbreuAinda não há avaliações
- Fundamentação T-WPS OfficeDocumento2 páginasFundamentação T-WPS OfficeagrapacanatejugaAinda não há avaliações
- Trabalho ProntoDocumento5 páginasTrabalho ProntoEduardoHenriqueAinda não há avaliações
- Tensão de Restabelecimento Transitória (TRT) - TCCDocumento26 páginasTensão de Restabelecimento Transitória (TRT) - TCCArthur DancAinda não há avaliações
- Qualidade Da Energia Eletrica Dentro Da Industria 4.0Documento25 páginasQualidade Da Energia Eletrica Dentro Da Industria 4.0eng.alanportelaAinda não há avaliações
- Relatorio Pivit Mirelle REvisado2Documento29 páginasRelatorio Pivit Mirelle REvisado2mirelleAinda não há avaliações
- Artigo Correção Do Fator de Potencia PDFDocumento13 páginasArtigo Correção Do Fator de Potencia PDFAnne Caroline RodriguesAinda não há avaliações
- SBC TemplateDocumento23 páginasSBC TemplateGustavo Lino Morales EspinozaAinda não há avaliações
- Análise Da Qualidade de Energia Elétrica em Consumidores Industriais e Públicos Luana Holetz 1 10Documento10 páginasAnálise Da Qualidade de Energia Elétrica em Consumidores Industriais e Públicos Luana Holetz 1 10George Romero Tadeu Carvalho NunesAinda não há avaliações
- Eletronica de PotenciaDocumento10 páginasEletronica de PotenciaAriane RochaAinda não há avaliações
- Desequilibrio de Tensao Setoreletr 1Documento4 páginasDesequilibrio de Tensao Setoreletr 1oriontheoneAinda não há avaliações
- Relatorio de MecFluDocumento12 páginasRelatorio de MecFluBrailleEcran ProjetoAinda não há avaliações
- Impactos Na Regulação de Tensão Decorrentes de Geradores Fotovoltaicos Conectados A Rede Elétrica de Média Tensão E Baixa TensãoDocumento10 páginasImpactos Na Regulação de Tensão Decorrentes de Geradores Fotovoltaicos Conectados A Rede Elétrica de Média Tensão E Baixa Tensãokami gomesAinda não há avaliações
- ApostilaSEP IDocumento125 páginasApostilaSEP INathalia OliveiraAinda não há avaliações
- Tra Cose Interligacao de Redes.Documento25 páginasTra Cose Interligacao de Redes.Ell IodoAinda não há avaliações
- Apostila Analisede Qualidadede EnergiaDocumento60 páginasApostila Analisede Qualidadede EnergiaCarlos CuryAinda não há avaliações
- Qualidade de EnergiaDocumento5 páginasQualidade de EnergiaRui Miguel SalvadorAinda não há avaliações
- Manual Qualidade Edp PDFDocumento112 páginasManual Qualidade Edp PDFtarta8Ainda não há avaliações
- Qualidade Energia Elétrica Aula PráticaDocumento14 páginasQualidade Energia Elétrica Aula Práticararison fortesAinda não há avaliações
- Análise Da Qualidade de Energia de Um Sistema FV Conectado A RedeDocumento11 páginasAnálise Da Qualidade de Energia de Um Sistema FV Conectado A RedeLeandro NunesAinda não há avaliações
- Análise Da Qualidade de Energia Elétrica Na IndústriaDocumento9 páginasAnálise Da Qualidade de Energia Elétrica Na IndústriathiagoAinda não há avaliações
- 378-1221 EdDocumento17 páginas378-1221 Edavelinoantonioraja2019Ainda não há avaliações
- Atcc - FinalDocumento17 páginasAtcc - FinalMendes Orlando BanzeAinda não há avaliações
- Qualidade de Energia Disturbios A2Documento20 páginasQualidade de Energia Disturbios A2Carolina WanzelerAinda não há avaliações
- Análise Do Comportamento de Geradores Síncronos A ÍmãsDocumento32 páginasAnálise Do Comportamento de Geradores Síncronos A Ímãseng.walter.soaresAinda não há avaliações
- Fonte Chaveaada Projeto PDFDocumento33 páginasFonte Chaveaada Projeto PDFSOSIGENES TAVARESAinda não há avaliações
- Disturbios Que Afetam A Qualidade de EnergiaDocumento20 páginasDisturbios Que Afetam A Qualidade de Energialuizcfarkas5401100% (3)
- Encarte NR10-Básico Unid01Documento51 páginasEncarte NR10-Básico Unid01Guilherme SousaAinda não há avaliações
- Instituto Superior de Transportes E Comunicações: Eletrónica de Energia-I TL1Documento6 páginasInstituto Superior de Transportes E Comunicações: Eletrónica de Energia-I TL1MiguelOriellAinda não há avaliações
- Estudo Da Qualidade de Energia Na Rede Elétrica Da Lha Do Maio (Recuperado Automaticamente)Documento77 páginasEstudo Da Qualidade de Energia Na Rede Elétrica Da Lha Do Maio (Recuperado Automaticamente)Jailson RibeiroAinda não há avaliações
- INTRODUÇÃO1Documento9 páginasINTRODUÇÃO1Ezequiel ZakAinda não há avaliações
- 1 PB Foto Medidor MARH 21Documento21 páginas1 PB Foto Medidor MARH 21ChalesIpherAinda não há avaliações
- Factor de Potência cv5Documento11 páginasFactor de Potência cv5andersonoracio59Ainda não há avaliações
- Paralelismo de AlternadoresDocumento6 páginasParalelismo de AlternadoresCláudio JúniorAinda não há avaliações
- Jose de Araujo Rocha - Atividade 2Documento14 páginasJose de Araujo Rocha - Atividade 2diovane attilio cecchettAinda não há avaliações
- Medidas de segurança contra incêndio em subestações de energia no ParanáNo EverandMedidas de segurança contra incêndio em subestações de energia no ParanáAinda não há avaliações
- Fluxo de potência: Teoria e implementação de códigos computacionaisNo EverandFluxo de potência: Teoria e implementação de códigos computacionaisAinda não há avaliações
- Filtro Ativo de Potência e Armazenamento em Sistemas de Distribuição: uma Busca pela Qualidade e Eficiência Energética em Sistemas com Geração IntermitenteNo EverandFiltro Ativo de Potência e Armazenamento em Sistemas de Distribuição: uma Busca pela Qualidade e Eficiência Energética em Sistemas com Geração IntermitenteAinda não há avaliações
- Técnicas de inteligência artificial aplicadas na análise de mercados de eletricidade: desafios técnico-econômicos associados à geração eólica e aos sistemas de armazenamento de energiaNo EverandTécnicas de inteligência artificial aplicadas na análise de mercados de eletricidade: desafios técnico-econômicos associados à geração eólica e aos sistemas de armazenamento de energiaAinda não há avaliações
- Usinas hidrelétricas e centrais elétricas a diesel: exercícios práticos e comentadosNo EverandUsinas hidrelétricas e centrais elétricas a diesel: exercícios práticos e comentadosAinda não há avaliações
- Manual RE7000 RV01Documento73 páginasManual RE7000 RV01jullianofaria100% (1)
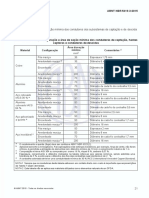
- Tabela de Cabos MínimosDocumento2 páginasTabela de Cabos MínimosjullianofariaAinda não há avaliações
- Sistema de Gestão de Indicadores Do Desempenho - A Experiência Da Secretaria de GestãoDocumento38 páginasSistema de Gestão de Indicadores Do Desempenho - A Experiência Da Secretaria de Gestãogilsonvmoreira2448Ainda não há avaliações
- ENIAC - Eletrônica Aplicada - Prova EletrônicaDocumento7 páginasENIAC - Eletrônica Aplicada - Prova Eletrônicalhm.tecsegAinda não há avaliações
- C# - CRUD Com ADODocumento16 páginasC# - CRUD Com ADOAlexandre MoraisAinda não há avaliações
- Fototerapia Bilitron BED 4006 - FanemDocumento27 páginasFototerapia Bilitron BED 4006 - FanemBruno100% (1)
- C. Bombardelli - Apostila de Química Geral e Inorgânica (1a Ed.)Documento159 páginasC. Bombardelli - Apostila de Química Geral e Inorgânica (1a Ed.)Clovis Bombardelli50% (2)
- 01 Definicao de Cabeamento Estruturado INFRAESTRUTURA de REDES IMDDocumento16 páginas01 Definicao de Cabeamento Estruturado INFRAESTRUTURA de REDES IMDIsaac SandrickAinda não há avaliações
- M3 Plus - Procedimento de Configuração Rev 04-06-2013Documento16 páginasM3 Plus - Procedimento de Configuração Rev 04-06-2013Flavio SouzaAinda não há avaliações
- Ebook 3 Tipos de Aterramento Que Você Precisa Saber e Qual É o Mais Indicado Pela NBR 5410Documento18 páginasEbook 3 Tipos de Aterramento Que Você Precisa Saber e Qual É o Mais Indicado Pela NBR 5410carlos100% (1)
- TP e TCDocumento100 páginasTP e TCelcioAinda não há avaliações
- Chcklist Iphone e Termo de GarantiaDocumento1 páginaChcklist Iphone e Termo de GarantiaRafael CopattiAinda não há avaliações
- Potencial de Eletrodo - Diagramas de Pourbaix 2Documento50 páginasPotencial de Eletrodo - Diagramas de Pourbaix 2Alessandro Saia MorenoAinda não há avaliações
- Introdução A Ciências Dos MateriaisDocumento13 páginasIntrodução A Ciências Dos MateriaisNando100% (1)
- Aula 14 - Reações Orgânicas de SubstituiçãoDocumento14 páginasAula 14 - Reações Orgânicas de SubstituiçãoAlexânder De Paula RodriguesAinda não há avaliações
- Rede DAT-Montagem de Estrutura Padronizada de BTEDocumento7 páginasRede DAT-Montagem de Estrutura Padronizada de BTEDarlan100% (1)
- SEPAM Série 20 - Manual de Utilização 2009Documento221 páginasSEPAM Série 20 - Manual de Utilização 2009eduardosprungAinda não há avaliações
- 21-091757 PMT Convencional 15kv - As BuiltDocumento14 páginas21-091757 PMT Convencional 15kv - As BuiltPaulo VieiraAinda não há avaliações
- Conhecendo o Teclado Do ComputadorDocumento6 páginasConhecendo o Teclado Do ComputadorSilas Smith100% (1)
- Modulaçao OokDocumento15 páginasModulaçao OokHugo Aguiar100% (1)
- Bosch MotronicDocumento21 páginasBosch MotronicGeison M Barbosa100% (2)
- Instalação Da Interface Do PC VasDocumento27 páginasInstalação Da Interface Do PC VasnoturnonoturnoAinda não há avaliações
- 3 Mod 4402 Rev04 Todos Eqtos Uhf trs861Documento10 páginas3 Mod 4402 Rev04 Todos Eqtos Uhf trs861Luduvico ClaudioAinda não há avaliações
- Relatorio de AutomaçãoIDocumento12 páginasRelatorio de AutomaçãoISilvioMarianoAinda não há avaliações
- WEG Plano de Manutencao Motores e Geradores de Grande Porte Aplicacao Naval 50049454 Catalogo Portugues BR PDFDocumento2 páginasWEG Plano de Manutencao Motores e Geradores de Grande Porte Aplicacao Naval 50049454 Catalogo Portugues BR PDFNaftal MassingueAinda não há avaliações
- Manual Vita Easyshade PortuguêsDocumento36 páginasManual Vita Easyshade PortuguêsHugo AlvimAinda não há avaliações
- Controlador Lógico Programável Micro820Documento2 páginasControlador Lógico Programável Micro820lcordalAinda não há avaliações
- Entendendo Malhas de ControleDocumento86 páginasEntendendo Malhas de Controlejgtesta3934Ainda não há avaliações
- Plasma ManualDocumento25 páginasPlasma ManualJean Paulo SalvatiAinda não há avaliações
- Portas LogicasDocumento15 páginasPortas LogicasalexandreaweAinda não há avaliações