Você também pode gostar
- Reatores 2 - Apostila 1 - Regra de Simpson - 2015Documento10 páginasReatores 2 - Apostila 1 - Regra de Simpson - 2015muriloinnocentiniAinda não há avaliações
- 7a Lista Calculo IDocumento2 páginas7a Lista Calculo IReginaldo CamposAinda não há avaliações
- Lista 1 - Derivada - Teoremas OperatóriosDocumento2 páginasLista 1 - Derivada - Teoremas OperatóriosAMANDA NATALIE DE MENEZES ALENCARAinda não há avaliações
- Lista de DrivadasDocumento9 páginasLista de DrivadasSabedoria MathAinda não há avaliações
- Edson - Lista 2 Álgebra LinearDocumento4 páginasEdson - Lista 2 Álgebra LinearCinthya Borges Lopes da CostaAinda não há avaliações
- RTC PDFDocumento3 páginasRTC PDFSamuel MarquesAinda não há avaliações
- Calculo2 MIPSI2019-20 Folha3Documento2 páginasCalculo2 MIPSI2019-20 Folha3horanvera10Ainda não há avaliações
- Lista 2 Calculo IIIDocumento2 páginasLista 2 Calculo IIICanal AleatórioAinda não há avaliações
- 2018 2 4prova Recuperação CA EngElétricalDocumento6 páginas2018 2 4prova Recuperação CA EngElétricalMateusAinda não há avaliações
- Função Geradora de Momentos e Função CaracterísticaDocumento7 páginasFunção Geradora de Momentos e Função CaracterísticaRodrigo FerreiraAinda não há avaliações
- Lista 2 IntegraisDocumento2 páginasLista 2 IntegraisJuan Guimarães0% (1)
- Prova1 2018 2Documento2 páginasProva1 2018 2Carlos Aurélio Faria da RochaAinda não há avaliações
- Aula 4 - Excitação PeriódicaDocumento17 páginasAula 4 - Excitação PeriódicaslipcoutAinda não há avaliações
- Derivadas ParciaisDocumento11 páginasDerivadas Parciaisizailson tenorio alvesAinda não há avaliações
- Módulo 17 - Mudança de Variáveis (Substituição)Documento7 páginasMódulo 17 - Mudança de Variáveis (Substituição)Leticia de Assis BrazAinda não há avaliações
- Ficha Trab11Documento5 páginasFicha Trab11Pedro RodriguesAinda não há avaliações
- Integrais de Funções Racionais - Integrais de Funções Contendo Um TrinômioDocumento10 páginasIntegrais de Funções Racionais - Integrais de Funções Contendo Um TrinômioMariana 3100% (1)
- Guias CIVDocumento19 páginasGuias CIVanon_652460354Ainda não há avaliações
- Aula Prática - Cálculo DiferencialDocumento1 páginaAula Prática - Cálculo DiferencialAli MucusseteAinda não há avaliações
- Calculo1 Aula 12 (2014.1) - Derivada Na Forma ParametricaDocumento5 páginasCalculo1 Aula 12 (2014.1) - Derivada Na Forma Parametricaalexandre orlando macanzeAinda não há avaliações
- Aula 12 Funções Vetoriais - Hodógrafo e Operações PDFDocumento10 páginasAula 12 Funções Vetoriais - Hodógrafo e Operações PDFÁtila DamascenoAinda não há avaliações
- Teste de Sis Sin PDFDocumento2 páginasTeste de Sis Sin PDFUTA - Std - Herlany RamosAinda não há avaliações
- Eq OndaDocumento17 páginasEq OndaElaine SantosAinda não há avaliações
- Ficha5 CEEDocumento2 páginasFicha5 CEEMargarida VazAinda não há avaliações
- Calculo2 MIPSI2019-20 Folha3Documento11 páginasCalculo2 MIPSI2019-20 Folha3horanvera10Ainda não há avaliações
- Lista de Exercícios de INtegrais, Professor JONATHAS, CEFET-MGDocumento3 páginasLista de Exercícios de INtegrais, Professor JONATHAS, CEFET-MGDouglas OliveiraAinda não há avaliações
- Funções de Várias Variáveis: y X y X y X y XDocumento13 páginasFunções de Várias Variáveis: y X y X y X y XRossana LaizaAinda não há avaliações
- Teste 2 EA614 1s2020Documento2 páginasTeste 2 EA614 1s2020Joao Das NevesAinda não há avaliações
- Calculo 3Documento2 páginasCalculo 3Brightwing MalkavAinda não há avaliações
- Regras Integral (Primitivação)Documento5 páginasRegras Integral (Primitivação)zbonfimAinda não há avaliações
- Ap1 - Cálculo Ii - 2011/1 GabaritoDocumento5 páginasAp1 - Cálculo Ii - 2011/1 GabaritoGlaucia PiresAinda não há avaliações
- Lista de Exercícios de CálculoDocumento9 páginasLista de Exercícios de CálculoKarla LopesAinda não há avaliações
- 9a Lista de C Lculo II 2023-2Documento4 páginas9a Lista de C Lculo II 2023-2ricardimcalil17Ainda não há avaliações
- Listas Cálculo 2Documento7 páginasListas Cálculo 2Bruno SoutoAinda não há avaliações
- 1 - Lista - SinaisDocumento4 páginas1 - Lista - SinaisThiagoPinheiroAinda não há avaliações
- Tabela PrimitivasDocumento5 páginasTabela PrimitivasPatríciaa BarrosAinda não há avaliações
- Funcoes de Varias Variaveis Regra Da CadeiaDocumento9 páginasFuncoes de Varias Variaveis Regra Da CadeiaPjj SalvadorAinda não há avaliações
- 03a Lista de Exercícios - Integral IndefinidaDocumento4 páginas03a Lista de Exercícios - Integral IndefinidaReginaldo CamposAinda não há avaliações
- Listadeintegrais 02 SubstDocumento1 páginaListadeintegrais 02 SubstFelipe MoreiraAinda não há avaliações
- Resumo EDOs de 1 Ordem EXATASDocumento22 páginasResumo EDOs de 1 Ordem EXATASClaudioAinda não há avaliações
- Calculo1 ECA Lista4 15 2 PDFDocumento2 páginasCalculo1 ECA Lista4 15 2 PDFVenilson SenaAinda não há avaliações
- Linearizaà à oDocumento19 páginasLinearizaà à oplxdndaltAinda não há avaliações
- Lista2 Calculo1 2023 2Documento6 páginasLista2 Calculo1 2023 2Luiz Felipe Maciel PedrosaAinda não há avaliações
- Regras de DerivaçãoDocumento4 páginasRegras de DerivaçãoInes AfonsoAinda não há avaliações
- Cálculo II - ListaDocumento2 páginasCálculo II - ListaMarlon ÍtaloAinda não há avaliações
- Lista de Casa 2 - DerivadaDocumento7 páginasLista de Casa 2 - DerivadaPaulo RobertoAinda não há avaliações
- 4 Estagio UFCG Calculo 3Documento8 páginas4 Estagio UFCG Calculo 3reis emperorAinda não há avaliações
- Capitulo 3 - Funções VetoriaisDocumento17 páginasCapitulo 3 - Funções VetoriaisJoanaAinda não há avaliações
- EDL ExistenciaDocumento20 páginasEDL ExistenciaJoão Luiz CarvalhoAinda não há avaliações
- Integralde LinhaDocumento13 páginasIntegralde LinhaMaxuel LemosAinda não há avaliações
- Listadeintegrais 05 SubstrigDocumento1 páginaListadeintegrais 05 SubstrigFelipe MoreiraAinda não há avaliações
- 1 Lista CALCULO DIFERENCIAL 1 2022 1Documento8 páginas1 Lista CALCULO DIFERENCIAL 1 2022 1AuroraAinda não há avaliações
- Ficha IDocumento7 páginasFicha IDenilson RodriguesAinda não há avaliações
- MuslimDocumento19 páginasMuslimAssane Mussa AlantaraAinda não há avaliações
- Lista 01 de CVV 1s 2024Documento5 páginasLista 01 de CVV 1s 2024leleve1411Ainda não há avaliações
- FichaCDI-I Cap5 2223Documento2 páginasFichaCDI-I Cap5 2223adriana duarteAinda não há avaliações
- Ca Lculo Diferencial e Integral IIDocumento3 páginasCa Lculo Diferencial e Integral IIJoão Pedro SantosAinda não há avaliações
- 3 - Campo Magnético Ao Redor de Um Condutor RetoDocumento4 páginas3 - Campo Magnético Ao Redor de Um Condutor RetoLuciano Silva do Nascimento100% (1)
- 4 - Circuitos Biestáveis (Flip-Flop's)Documento4 páginas4 - Circuitos Biestáveis (Flip-Flop's)Luciano Silva do NascimentoAinda não há avaliações
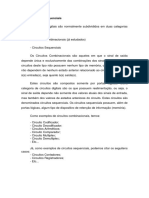
- 3 - Circuitos SequenciaisDocumento4 páginas3 - Circuitos SequenciaisLuciano Silva do NascimentoAinda não há avaliações
- 2 - Circuitos Biestáveis (Flip-Flop's)Documento3 páginas2 - Circuitos Biestáveis (Flip-Flop's)Luciano Silva do NascimentoAinda não há avaliações
- A Metalurgia Do Alumínio e Suas LigasDocumento62 páginasA Metalurgia Do Alumínio e Suas LigasLuciano Silva do NascimentoAinda não há avaliações
- Princípios Básicos de Ensaios MecânicosDocumento30 páginasPrincípios Básicos de Ensaios MecânicosLuciano Silva do NascimentoAinda não há avaliações
- 2 - Campo Magnético No Interior de SolenoideDocumento2 páginas2 - Campo Magnético No Interior de SolenoideLuciano Silva do NascimentoAinda não há avaliações
- Apostila - Pensamento-ComputacionalDocumento89 páginasApostila - Pensamento-ComputacionalLuciano Silva do Nascimento100% (1)
- Uma Breve Análise Do Movimento BrownianoDocumento142 páginasUma Breve Análise Do Movimento BrownianoLuciano Silva do NascimentoAinda não há avaliações
- Lista de Exercício - Estrutura Cristalina Dos MetaisDocumento8 páginasLista de Exercício - Estrutura Cristalina Dos MetaisLuciano Silva do NascimentoAinda não há avaliações
- Campo Magnético de Uma Espira CircularDocumento3 páginasCampo Magnético de Uma Espira CircularLuciano Silva do NascimentoAinda não há avaliações
- TMP Y08tvmDocumento19 páginasTMP Y08tvmLuciano Silva do NascimentoAinda não há avaliações
- Aula - 10-10Documento19 páginasAula - 10-10Alana Bueno de AndradeAinda não há avaliações
- Convertendo Vendas Através Do InstagramDocumento1 páginaConvertendo Vendas Através Do InstagrampauloAinda não há avaliações
- Mat Olimpiadas2 4anoDocumento29 páginasMat Olimpiadas2 4anoceliavenancioAinda não há avaliações
- O Ser para A Morte em HeideggerDocumento19 páginasO Ser para A Morte em HeideggerRestaurante Nam ThaiAinda não há avaliações
- Ligação Química Nos Metais e Noutros SólidosDocumento37 páginasLigação Química Nos Metais e Noutros SólidosFrancisca João TeixeiraAinda não há avaliações
- Dia Da Literatura BrasileiraDocumento1 páginaDia Da Literatura BrasileiraCamila Juliana SantanaAinda não há avaliações
- AFRICANIDADE: TER OU NÃO TER? As Leis e A Responsabilidade Sociocultural Do Professor de Língua Portuguesa Com A TemáticaDocumento14 páginasAFRICANIDADE: TER OU NÃO TER? As Leis e A Responsabilidade Sociocultural Do Professor de Língua Portuguesa Com A TemáticaMARCIAREMEDIOAinda não há avaliações
- NBR-6401/80 Centrais de Ar CondicionadoDocumento17 páginasNBR-6401/80 Centrais de Ar CondicionadoheroijcAinda não há avaliações
- Alegações Finais - 180Documento6 páginasAlegações Finais - 180Michelle Guasti RepossiAinda não há avaliações
- Livro Direreito Empresarial e Do ConsumidorDocumento152 páginasLivro Direreito Empresarial e Do Consumidoralexander reisAinda não há avaliações
- Cetoacidose DiabéticaDocumento35 páginasCetoacidose DiabéticaMichella Przybycien50% (2)
- Manual GL-W180 PortuguêsDocumento13 páginasManual GL-W180 PortuguêsCauê Miranda100% (1)
- Palestra Pontos RiscadosDocumento31 páginasPalestra Pontos RiscadosAna LuciaAinda não há avaliações
- Tutorial FMCDocumento16 páginasTutorial FMCafonsogonAinda não há avaliações
- Atividade Policial 3 ParteDocumento100 páginasAtividade Policial 3 PartePaulo PintoAinda não há avaliações
- Ae - Pal10 - Teste2 - Nov - 2019 Após o Casamento de Ines Com o EscudeiroDocumento4 páginasAe - Pal10 - Teste2 - Nov - 2019 Após o Casamento de Ines Com o Escudeiro7sAinda não há avaliações
- Provão 9 AnoDocumento5 páginasProvão 9 AnoAdriani Salete Mokfa PanhoAinda não há avaliações
- Guia Do Usuário OTDRDocumento248 páginasGuia Do Usuário OTDRCameras ControleAinda não há avaliações
- Louis Begley - Franz Kafka - O Mundo Prodigioso Que Tenho Na CabeçaDocumento236 páginasLouis Begley - Franz Kafka - O Mundo Prodigioso Que Tenho Na CabeçaJhonatan SouzaAinda não há avaliações
- Biomecânica Funcional em PediatriaDocumento101 páginasBiomecânica Funcional em PediatriaMARIA EDUARDA DA SILVA SANTOSAinda não há avaliações
- Loucura (Part. Veigh e MC Cabelinho) - Borges - LDocumento1 páginaLoucura (Part. Veigh e MC Cabelinho) - Borges - LpachulinksclounAinda não há avaliações
- Introdução A HotelariaDocumento37 páginasIntrodução A HotelariaCINARA FREITAS DOS SANTOS100% (1)
- Tese Mobilidade Urbana Bicicletas PDFDocumento306 páginasTese Mobilidade Urbana Bicicletas PDFMarcos PrudenteAinda não há avaliações
- Pencas e Balangandans Estudo Sobre ObjetosDocumento12 páginasPencas e Balangandans Estudo Sobre ObjetosFlávio MacielxAinda não há avaliações
- Eletromagnetismo I - Aula 01 - Histórico + AplicaçõesDocumento35 páginasEletromagnetismo I - Aula 01 - Histórico + AplicaçõesLeandro SilvaAinda não há avaliações
- Guia Básico - Escada Montada - Página 2 de 8 - QualificadDocumento5 páginasGuia Básico - Escada Montada - Página 2 de 8 - QualificadGledson Pantoja TeixeiraAinda não há avaliações
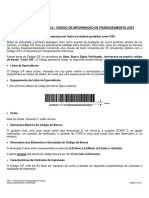
- Especificação Técnica Código de Barras CIF GPOST 20-05-2020Documento3 páginasEspecificação Técnica Código de Barras CIF GPOST 20-05-2020openid_1V1iDxPoAinda não há avaliações
- Mestre Mantak Chia - A Alquimia Interior TaoistaDocumento11 páginasMestre Mantak Chia - A Alquimia Interior TaoistaportynsqAinda não há avaliações
- Layout WebService Protesto CRADocumento34 páginasLayout WebService Protesto CRAeverton joel silvaAinda não há avaliações
- (2.7) ADN7 - DP - (PropostaSolucoes - Fichas de Avaliação)Documento16 páginas(2.7) ADN7 - DP - (PropostaSolucoes - Fichas de Avaliação)acmnsilvaAinda não há avaliações