Você também pode gostar
- A2 02.2 MecFluIIDocumento2 páginasA2 02.2 MecFluIIcarlosAinda não há avaliações
- A2 04.2 MecFluIIDocumento1 páginaA2 04.2 MecFluIIcarlosAinda não há avaliações
- A2 03.1 MecFluIIDocumento1 páginaA2 03.1 MecFluIIcarlosAinda não há avaliações
- A2 05.1 MecFluIIDocumento1 páginaA2 05.1 MecFluIIcarlosAinda não há avaliações
- A2 04.1 MecFluIIDocumento1 páginaA2 04.1 MecFluIIcarlosAinda não há avaliações
- A1 05.2 MecFluIIDocumento1 páginaA1 05.2 MecFluIIcarlosAinda não há avaliações
- A3 04.1 MecFluIIDocumento1 páginaA3 04.1 MecFluIIcarlosAinda não há avaliações
- A1 04.2 MecFluIIDocumento1 páginaA1 04.2 MecFluIIcarlosAinda não há avaliações
- Universidade Federal de Campina Grande Centro de Ciências e Tecnologia Unidade Acadêmica de Engenharia Mecânica Área de Metalurgia e FabricaçãoDocumento12 páginasUniversidade Federal de Campina Grande Centro de Ciências e Tecnologia Unidade Acadêmica de Engenharia Mecânica Área de Metalurgia e FabricaçãocarlosAinda não há avaliações
- Seleção de Materiais - Alunos Novo PDFDocumento66 páginasSeleção de Materiais - Alunos Novo PDFcarlosAinda não há avaliações
- A2 03.2 MecFluIIDocumento1 páginaA2 03.2 MecFluIIcarlosAinda não há avaliações
- 00 - Aula Inicial de Materiais I - 2017-1 PPC Novo-1Documento12 páginas00 - Aula Inicial de Materiais I - 2017-1 PPC Novo-1carlosAinda não há avaliações
- A2 01.2 MecFluIIDocumento1 páginaA2 01.2 MecFluIIcarlosAinda não há avaliações
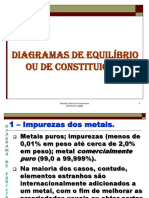
- Diagramas de Equilíbrio Ou de Constituição 1Documento61 páginasDiagramas de Equilíbrio Ou de Constituição 1carlosAinda não há avaliações
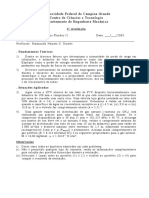
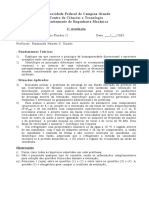
- Prova 1 Estagio TRANSCAL UFCGDocumento2 páginasProva 1 Estagio TRANSCAL UFCGcarlosAinda não há avaliações
- Metalurgia Extrativa e Siderurgia Tomo II - Alunos PDFDocumento96 páginasMetalurgia Extrativa e Siderurgia Tomo II - Alunos PDFcarlosAinda não há avaliações
- Aula 3 - Estrututura CristalinaDocumento50 páginasAula 3 - Estrututura CristalinaEric MansurAinda não há avaliações
- 15 - Plasticidade Dos Metais - 2015-2 Apagar Depois Da AulaDocumento96 páginas15 - Plasticidade Dos Metais - 2015-2 Apagar Depois Da AulacarlosAinda não há avaliações
- Relatório X - Princípio de Arquimedes EmpuxoDocumento7 páginasRelatório X - Princípio de Arquimedes EmpuxocarlosAinda não há avaliações
- Desordem Atômica Aula 1 PDFDocumento117 páginasDesordem Atômica Aula 1 PDFcarlosAinda não há avaliações
- 15 - Plasticidade Dos Metais - 2015-2 Apagar Depois Da AulaDocumento96 páginas15 - Plasticidade Dos Metais - 2015-2 Apagar Depois Da AulacarlosAinda não há avaliações
- Relatório XIII - Termômetro À Gás A Volume ConstanteDocumento9 páginasRelatório XIII - Termômetro À Gás A Volume ConstantecarlosAinda não há avaliações
- Prova 1 Estagio TRANSCAL UFCGDocumento2 páginasProva 1 Estagio TRANSCAL UFCGcarlosAinda não há avaliações
- Relatório XI - Princípio de Arquimedes Densidade e VolumeDocumento6 páginasRelatório XI - Princípio de Arquimedes Densidade e VolumecarlosAinda não há avaliações
- Relatório VI - OscilaçõesDocumento9 páginasRelatório VI - OscilaçõescarlosAinda não há avaliações
- Relatório VIII - DeslocamentoDocumento8 páginasRelatório VIII - DeslocamentocarlosAinda não há avaliações
- Relatório XII - Pêndulo FísicoDocumento7 páginasRelatório XII - Pêndulo FísicocarlosAinda não há avaliações
- Relatório XIII - Lei de Boyle - MariotteDocumento10 páginasRelatório XIII - Lei de Boyle - MariottecarlosAinda não há avaliações
- Relatório IX - Momento de Uma ForçaDocumento7 páginasRelatório IX - Momento de Uma ForçacarlosAinda não há avaliações
- Relatório V - AssociaçõesDocumento10 páginasRelatório V - AssociaçõescarlosAinda não há avaliações
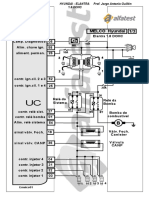
- Hyundai - Elantra 1.6 Dohc - JsalemanDocumento3 páginasHyundai - Elantra 1.6 Dohc - JsalemanLeonardo Molina100% (1)
- 2 Aula-NewDocumento29 páginas2 Aula-NewFrancisco CostaAinda não há avaliações
- PMOC Revisado 26082013 PDFDocumento38 páginasPMOC Revisado 26082013 PDFFernanda AndradeAinda não há avaliações
- 12 - Vigas MistasDocumento2 páginas12 - Vigas MistasLauro SandroAinda não há avaliações
- 4 Lista de Exercícios Fenomenos de TransporteDocumento3 páginas4 Lista de Exercícios Fenomenos de TransporteFelipe CalixtoAinda não há avaliações
- Accoes Sismicas Sobre Estruturas de SuporteDocumento8 páginasAccoes Sismicas Sobre Estruturas de SuporteJuventino Federico CumbaneAinda não há avaliações
- Aula Do Capítulo 7 - Livro ESTÁTICADocumento53 páginasAula Do Capítulo 7 - Livro ESTÁTICAALEXANDRE67% (3)
- Arquitetura - AçoMadeiras - Aula 3 e 4Documento53 páginasArquitetura - AçoMadeiras - Aula 3 e 4Juciorle SoaresAinda não há avaliações
- Lubrificantes e Graxas Shell PDFDocumento10 páginasLubrificantes e Graxas Shell PDFChagas OliveiraAinda não há avaliações
- Secagem de Materiais CerâmicosDocumento32 páginasSecagem de Materiais Cerâmicosariana gusmaAinda não há avaliações
- T6Documento8 páginasT6Vitor Joel ChavesAinda não há avaliações
- Capitulo 3.1. Propriedades Mecanicas Dos MateriaisDocumento9 páginasCapitulo 3.1. Propriedades Mecanicas Dos MateriaisGabriel CorreiaAinda não há avaliações
- Sangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSDocumento2 páginasSangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSasabrancoAinda não há avaliações
- Tabela JNGDocumento95 páginasTabela JNGCarloSilva0% (1)
- Seção 25Documento41 páginasSeção 25José Roberto VircentsAinda não há avaliações
- N 2668Documento256 páginasN 2668Ricardo CurioniAinda não há avaliações
- Capitulo 6 IncroperaDocumento60 páginasCapitulo 6 IncroperaRenanAinda não há avaliações
- Revista O Mecânico Regulagem de Válvulas Do OM 447 A Mecânico - Revista O Mecânico PDFDocumento4 páginasRevista O Mecânico Regulagem de Válvulas Do OM 447 A Mecânico - Revista O Mecânico PDFBarra Nova FerreiraAinda não há avaliações
- Torquímetros - GEDOREDocumento48 páginasTorquímetros - GEDORELeandro Nobrega BiedmaAinda não há avaliações
- Frenagem RegenerativaDocumento23 páginasFrenagem RegenerativaFilipe Sousa BarbosaAinda não há avaliações
- Catalogo Normas Tecnicas PetrobrasDocumento20 páginasCatalogo Normas Tecnicas PetrobrasRoberto AlessandroAinda não há avaliações
- 7 Valvula de ControleDocumento291 páginas7 Valvula de ControleCarlos Junior100% (2)
- G710-VHP 832 1002-0208 PDFDocumento4 páginasG710-VHP 832 1002-0208 PDFChagas OliveiraAinda não há avaliações
- Aula 1 - PneumáticaDocumento64 páginasAula 1 - PneumáticaDaniel Yusei OzawaAinda não há avaliações
- Hercules 6 0 PT BRDocumento8 páginasHercules 6 0 PT BRLucas ferreira da silvaAinda não há avaliações
- Colisoes Gps Prof Questao BKPDocumento15 páginasColisoes Gps Prof Questao BKPRicardoAmaralAinda não há avaliações
- Anexo 06 - Insp Máquinas e Equip EstacionáriosDocumento2 páginasAnexo 06 - Insp Máquinas e Equip EstacionáriosDeivisson DamascenoAinda não há avaliações
- 0100058-Catalogo de Pecas EGU Rev46Documento62 páginas0100058-Catalogo de Pecas EGU Rev46kaiquemello100% (1)
- Ciclo Diag - Volume 09 PDFDocumento104 páginasCiclo Diag - Volume 09 PDFgabrielzinho43100% (4)
- Aula 1 - Introdução Ao Concreto Armado Mod UniDocumento41 páginasAula 1 - Introdução Ao Concreto Armado Mod UniJoyce RosaAinda não há avaliações
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Mãos de Luz: Um Guia Para a Cura Através do Campo de Energia HumanoNo EverandMãos de Luz: Um Guia Para a Cura Através do Campo de Energia HumanoNota: 4 de 5 estrelas4/5 (5)
- Lean Game Development: Desenvolvimento enxuto de jogosNo EverandLean Game Development: Desenvolvimento enxuto de jogosAinda não há avaliações
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- A experiência da mesa: O segredo para criar relacionamentos profundosNo EverandA experiência da mesa: O segredo para criar relacionamentos profundosNota: 4.5 de 5 estrelas4.5/5 (10)
- Dieta pelo tipo sanguíneo: Da ancestralidade à epigenéticaNo EverandDieta pelo tipo sanguíneo: Da ancestralidade à epigenéticaNota: 5 de 5 estrelas5/5 (4)
- Sua Primeira Startup: O Guia de Negócios Startup, da Ideia ao LançamentoNo EverandSua Primeira Startup: O Guia de Negócios Startup, da Ideia ao LançamentoAinda não há avaliações
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipNo EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipAinda não há avaliações
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Crie seu mercado no mundo digital: Aprenda a viver de e-commerce com a estratégia que levou inúmeros negócios on-line a sair do zero e ultrapassar os R$ 100 mil em vendas por mêsNo EverandCrie seu mercado no mundo digital: Aprenda a viver de e-commerce com a estratégia que levou inúmeros negócios on-line a sair do zero e ultrapassar os R$ 100 mil em vendas por mêsNota: 4.5 de 5 estrelas4.5/5 (6)
- Fitoenergética: A Energia das Plantas no Equilíbrio da AlmaNo EverandFitoenergética: A Energia das Plantas no Equilíbrio da AlmaNota: 5 de 5 estrelas5/5 (17)
- Uma viagem pelo cérebro: A via rápida para entender neurociência: 1ª edição revisada e atualizadaNo EverandUma viagem pelo cérebro: A via rápida para entender neurociência: 1ª edição revisada e atualizadaNota: 4 de 5 estrelas4/5 (13)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Arduino prático: 10 projetos para executar, aprender, modificar e dominar o mundoNo EverandArduino prático: 10 projetos para executar, aprender, modificar e dominar o mundoNota: 3.5 de 5 estrelas3.5/5 (4)