Você também pode gostar
- Ativ. Adaptadas Ciências - 3º AnoDocumento88 páginasAtiv. Adaptadas Ciências - 3º AnoAninha Ribeiro100% (3)
- Pcmso - Log Brasil - 2021Documento31 páginasPcmso - Log Brasil - 2021David Augusto0% (1)
- Explorador de Labirintos 2D RobôDocumento52 páginasExplorador de Labirintos 2D RobôMaurício Vicente TavaresAinda não há avaliações
- Automatização CervejariaDocumento156 páginasAutomatização CervejariawillianlazzaretticreAinda não há avaliações
- TCC Planta DidáticaDocumento60 páginasTCC Planta DidáticaMarcos HolandaAinda não há avaliações
- temperatura do óleo no motor através de sensores NTCDocumento30 páginastemperatura do óleo no motor através de sensores NTCdougmec.pAinda não há avaliações
- 7845 BTG MBT 2300 L FPM A.en - PTDocumento124 páginas7845 BTG MBT 2300 L FPM A.en - PTclaudiotech76Ainda não há avaliações
- Minicurso de Instrumentação: Guia para operação de equipamentos de laboratórioDocumento43 páginasMinicurso de Instrumentação: Guia para operação de equipamentos de laboratóriojdsa123100% (1)
- Sistema de controle de temperatura de caldeiraDocumento61 páginasSistema de controle de temperatura de caldeiradaniloserafim100% (2)
- MONOGRAFIA DesenvolvimentoProtótipoSistema PDFDocumento79 páginasMONOGRAFIA DesenvolvimentoProtótipoSistema PDFFernando Augusto Campanharo CostaAinda não há avaliações
- MONOGRAFIA ControleSistemaAutomatizadoDocumento91 páginasMONOGRAFIA ControleSistemaAutomatizadoAlemao BovinoAinda não há avaliações
- Oxímetro de pulso USBDocumento69 páginasOxímetro de pulso USBJucimar Antunes CabralAinda não há avaliações
- DR Software Console DR Tube Head Display User Manual 0389 B 20180702 1241 (Portuguese)Documento54 páginasDR Software Console DR Tube Head Display User Manual 0389 B 20180702 1241 (Portuguese)erc001Ainda não há avaliações
- Liquiphant Density FML621Documento40 páginasLiquiphant Density FML621amaral de pedraAinda não há avaliações
- Promag W400 Portugues Ti01046dpt - 0920Documento102 páginasPromag W400 Portugues Ti01046dpt - 0920Hugo Fausto de CastroAinda não há avaliações
- Manual Acs580 FW (PT)Documento440 páginasManual Acs580 FW (PT)Daniela Kroetz0% (1)
- Apostila 8051 MicrocontroladoresDocumento78 páginasApostila 8051 MicrocontroladoresVictor InacioAinda não há avaliações
- TCC FgaDocumento53 páginasTCC FgaEdvan AragaoAinda não há avaliações
- Apostila Arduino Carlos BarreiraDocumento104 páginasApostila Arduino Carlos BarreiraSamuel Fernandes NunesAinda não há avaliações
- HS6613 Manual TécnicoDocumento152 páginasHS6613 Manual TécnicoRobson BarrosAinda não há avaliações
- Projeto, Construção e Controle de Uma Planta de Nível Didática Com Dinâmica RápidaDocumento149 páginasProjeto, Construção e Controle de Uma Planta de Nível Didática Com Dinâmica RápidaLucas StorchAinda não há avaliações
- BP6994 Emanual K45A Z106Documento116 páginasBP6994 Emanual K45A Z106Alecsandro AlvesAinda não há avaliações
- Monografia Do Trabalho de Conclus o de Curso Pedro Paulo VatrazDocumento72 páginasMonografia Do Trabalho de Conclus o de Curso Pedro Paulo VatrazPedro Paulo VatrazAinda não há avaliações
- 1718 Ex E/S: Manual Do UsuárioDocumento76 páginas1718 Ex E/S: Manual Do UsuárioAndré Andrade RamosAinda não há avaliações
- Manual Macro PFC Acs400 Rev. A - PTDocumento162 páginasManual Macro PFC Acs400 Rev. A - PTMultidrive BauruAinda não há avaliações
- Ti01272dpt 0822-00Documento118 páginasTi01272dpt 0822-00Louise RosaAinda não há avaliações
- Automação de bancada de calibração para medição de vazãoDocumento94 páginasAutomação de bancada de calibração para medição de vazãoDenise PereiraAinda não há avaliações
- Ti01508ppt 0421-00Documento68 páginasTi01508ppt 0421-00HELRY CAMPREGHERAinda não há avaliações
- MONOGRAFIA Desenvolvimento Controle Sist SdferkmvDocumento55 páginasMONOGRAFIA Desenvolvimento Controle Sist SdferkmvDaniel PereiraAinda não há avaliações
- Tut ArduinoDocumento80 páginasTut ArduinodouglasmaiaAinda não há avaliações
- Contrlador Pico 1760Documento60 páginasContrlador Pico 1760semefeito_nofxAinda não há avaliações
- Asus x44cDocumento115 páginasAsus x44cGiovani FariasAinda não há avaliações
- Leica CM1860 IFU 2v3Q PTDocumento108 páginasLeica CM1860 IFU 2v3Q PTtecsaudehuolAinda não há avaliações
- LIGAÇÕES COND PT PDFDocumento32 páginasLIGAÇÕES COND PT PDFAngeloAinda não há avaliações
- Relatorio1 - CópiaDocumento25 páginasRelatorio1 - CópiaJulia DubocAinda não há avaliações
- PR 23 Manual de Instrucao IM PT PR23Documento208 páginasPR 23 Manual de Instrucao IM PT PR23Mauricio BaronAinda não há avaliações
- Controle de temperatura com kit educacionalDocumento83 páginasControle de temperatura com kit educacionalrob15sonAinda não há avaliações
- PFC Eduardo - Guilherme - Victor Ac-19557Documento56 páginasPFC Eduardo - Guilherme - Victor Ac-19557Idamara Lobo DiasAinda não há avaliações
- Endress - Promag P300Documento114 páginasEndress - Promag P300Rafael CarmoAinda não há avaliações
- TCC Alailson OficialoficialDocumento54 páginasTCC Alailson Oficialoficialribeiro carvalhoAinda não há avaliações
- Manual PowerNET M-300Documento105 páginasManual PowerNET M-300Alexandre Winck RamosAinda não há avaliações
- Projetor EPSON S5 PDFDocumento126 páginasProjetor EPSON S5 PDFFábio Sardinha AdvocaciaAinda não há avaliações
- Manual Epson S5Documento126 páginasManual Epson S5Raul VargasAinda não há avaliações
- Tprno de BarroDocumento98 páginasTprno de BarroRubens ToledoAinda não há avaliações
- Relatório Final João Victor v1 CompressedDocumento36 páginasRelatório Final João Victor v1 CompressedPaulo LealAinda não há avaliações
- Manual pHmetro Digital PG3000Documento52 páginasManual pHmetro Digital PG3000Lab Elétrica UDIAinda não há avaliações
- Obtenção de etanol a partir de resíduos de cachaçaDocumento126 páginasObtenção de etanol a partir de resíduos de cachaçaHerbert SenzanoAinda não há avaliações
- Análise do ciclo de varredura do CLIC-02Documento45 páginasAnálise do ciclo de varredura do CLIC-02Valter SilvaAinda não há avaliações
- Manual Gehaka G2000Documento52 páginasManual Gehaka G2000Edgar Henrique DavinAinda não há avaliações
- 10-TCC2-Fernando Teixera - Leonardo OrtolaniDocumento109 páginas10-TCC2-Fernando Teixera - Leonardo OrtolaniJoaoAinda não há avaliações
- Monopoli 10001950Documento65 páginasMonopoli 10001950Paulo Sergio GarciaAinda não há avaliações
- Controle de nível de água via CLPDocumento75 páginasControle de nível de água via CLPRudnei BarbosaAinda não há avaliações
- PM200 Manual Ref63230-510-200a1 06-09Documento61 páginasPM200 Manual Ref63230-510-200a1 06-09Sergio GuerreiroAinda não há avaliações
- PT ACS800 Standard CTR PRG FW LDocumento294 páginasPT ACS800 Standard CTR PRG FW LDiogo FiaesAinda não há avaliações
- Implementando Um Placar Esportivo Para Handebol Com Base No Xc8 E Pic18f2520No EverandImplementando Um Placar Esportivo Para Handebol Com Base No Xc8 E Pic18f2520Ainda não há avaliações
- Implementando Um Placar Esportivo Para Badminton Com Base No Xc8 E Pic18f2520No EverandImplementando Um Placar Esportivo Para Badminton Com Base No Xc8 E Pic18f2520Ainda não há avaliações
- TV LG TM2 - Manual PDFDocumento44 páginasTV LG TM2 - Manual PDFdflopes100% (1)
- Desenvolvendo Um Medidor De Ph Modbus Tcp/ip No PicNo EverandDesenvolvendo Um Medidor De Ph Modbus Tcp/ip No PicAinda não há avaliações
- Implementando Um Placar Esportivo Para Luta Greco-romana Com Base No Xc8 E Pic18f2520No EverandImplementando Um Placar Esportivo Para Luta Greco-romana Com Base No Xc8 E Pic18f2520Ainda não há avaliações
- Implementando Um Placar Esportivo Para Voleibol Com Base No Xc8 E Pic18f2520No EverandImplementando Um Placar Esportivo Para Voleibol Com Base No Xc8 E Pic18f2520Ainda não há avaliações
- Máquinas Elétricas - Av2a - 2022 - 2Documento2 páginasMáquinas Elétricas - Av2a - 2022 - 2iutnrAinda não há avaliações
- Relatório de Estágio: Gustavo BavarescoDocumento25 páginasRelatório de Estágio: Gustavo BavarescoiutnrAinda não há avaliações
- Fundação Universidade de Passo Fundo Centro de Ensino Médio Integrado Upf Curso Técnico em EletrotécnicaDocumento9 páginasFundação Universidade de Passo Fundo Centro de Ensino Médio Integrado Upf Curso Técnico em EletrotécnicaiutnrAinda não há avaliações
- O preço da felicidade e a busca pela dignidadeDocumento4 páginasO preço da felicidade e a busca pela dignidadeiutnrAinda não há avaliações
- Valuation e Precificação de Ativos OnlineDocumento22 páginasValuation e Precificação de Ativos OnlineiutnrAinda não há avaliações
- Relatório de estágio em manutenção de equipamentos médicosDocumento28 páginasRelatório de estágio em manutenção de equipamentos médicosiutnrAinda não há avaliações
- Recibo de pagamento de mensalidade universitáriaDocumento1 páginaRecibo de pagamento de mensalidade universitáriaiutnrAinda não há avaliações
- UntitledDocumento8 páginasUntitlediutnrAinda não há avaliações
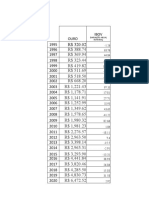
- Comparação dos rendimentos do ouro, IBOV, SELIC, inflação e M2 entre 1995 e 2023Documento12 páginasComparação dos rendimentos do ouro, IBOV, SELIC, inflação e M2 entre 1995 e 2023iutnrAinda não há avaliações
- Edital #004-2023 Processo Seletivo de Iniciação Científica Da Faculdade Cesurg MarauDocumento9 páginasEdital #004-2023 Processo Seletivo de Iniciação Científica Da Faculdade Cesurg MarauiutnrAinda não há avaliações
- ExercícioDocumento1 páginaExercícioiutnrAinda não há avaliações
- Sumariospnmgulsumariospdf23o20sumario PDFDocumento96 páginasSumariospnmgulsumariospdf23o20sumario PDFpedro manjarres figueredoAinda não há avaliações
- Gestão da Produção - Introdução e Evolução HistóricaDocumento5 páginasGestão da Produção - Introdução e Evolução Históricaanonimovw0% (1)
- ENEM Simulado de Matemática BásicaDocumento14 páginasENEM Simulado de Matemática BásicaLorena Marcelino100% (1)
- De JudIIJEF 2020 09 15 ADocumento401 páginasDe JudIIJEF 2020 09 15 AShayene RibeiroAinda não há avaliações
- O Alicerce de Seu CasamentoDocumento4 páginasO Alicerce de Seu CasamentoRafael PaixãoAinda não há avaliações
- Homem Meio AmbienteDocumento13 páginasHomem Meio AmbienteAline RodriguesAinda não há avaliações
- Gestao de Residuos Solidos em PembaDocumento16 páginasGestao de Residuos Solidos em PembaJunety DamasAinda não há avaliações
- IbamaDocumento17 páginasIbamaanon_700777709Ainda não há avaliações
- Resumo de Psicofarmacologia da Faculdade Internacional da ParaíbaDocumento6 páginasResumo de Psicofarmacologia da Faculdade Internacional da ParaíbaAphrouddy (Koi Ni Furu)Ainda não há avaliações
- Procedimentos Administrativos Na ExportaçãoDocumento42 páginasProcedimentos Administrativos Na ExportaçãoJonas Corassa100% (1)
- Circuito Elétrico Simulado 2Documento3 páginasCircuito Elétrico Simulado 2mlcsdrAinda não há avaliações
- Lentes e visão: exercícios sobre lentes convergentes e divergentesDocumento6 páginasLentes e visão: exercícios sobre lentes convergentes e divergentesleugimfisicaAinda não há avaliações
- Ferramentas essenciais para eletricistasDocumento3 páginasFerramentas essenciais para eletricistasHeloisa RomãoAinda não há avaliações
- Dízimo Mirim: Ensinando a Prática do Dízimo na CatequeseDocumento8 páginasDízimo Mirim: Ensinando a Prática do Dízimo na CatequesegracyynhaAinda não há avaliações
- Prova 1 - Agressão e DefesaDocumento8 páginasProva 1 - Agressão e DefesaLoghan Felipe Ferreira SouzaAinda não há avaliações
- Document - Onl - o Maior Segredo de Todos Os Tempos para Criar Dinheiro Joe VitaleDocumento51 páginasDocument - Onl - o Maior Segredo de Todos Os Tempos para Criar Dinheiro Joe VitaleAzevedoAinda não há avaliações
- Guia Corrimão DuploDocumento12 páginasGuia Corrimão DuploAndre VidalAinda não há avaliações
- Peb III MatematicaDocumento24 páginasPeb III MatematicaMatheus De Oliveira CamposAinda não há avaliações
- Manto PeridotíticoDocumento367 páginasManto Peridotítico19-2011ºB Ana Sofia Ferreira DuarteAinda não há avaliações
- Oração Do EnriquecimentoDocumento11 páginasOração Do EnriquecimentodradivinhaAinda não há avaliações
- Alimentação na BíbliaDocumento21 páginasAlimentação na BíbliaRav Yehunatan Mikhail ZaytsAinda não há avaliações
- Gazeta de AustinDocumento8 páginasGazeta de AustinAndre de SouzaAinda não há avaliações
- Bioinsumos Na Agricultura BrasileiraDocumento100 páginasBioinsumos Na Agricultura BrasileiraJOAO LUCAS XAVIER AZEVEDOAinda não há avaliações
- Formação do solo e seus fatoresDocumento8 páginasFormação do solo e seus fatoresDouglas AlexandreAinda não há avaliações
- Seminário de Dissertações e Teses em AndamentoDocumento91 páginasSeminário de Dissertações e Teses em AndamentoRaquel CardosoAinda não há avaliações
- As 10 Novas Habilidades para o Trabalho PDFDocumento5 páginasAs 10 Novas Habilidades para o Trabalho PDFFabrício ZandonáAinda não há avaliações
- Equipamentos para linha viva e segurançaDocumento9 páginasEquipamentos para linha viva e segurançaeric rojas salgadoAinda não há avaliações
- Plano de Aula Geo7 07und02Documento15 páginasPlano de Aula Geo7 07und02Cristian Chaves RodriguesAinda não há avaliações