Você também pode gostar
- Desenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoNo EverandDesenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoAinda não há avaliações
- Aprendizado de Análise de VibraçãoDocumento87 páginasAprendizado de Análise de VibraçãoWillian LimaAinda não há avaliações
- Projeto Da Estação Elevatória de ÁguaDocumento4 páginasProjeto Da Estação Elevatória de ÁguaJohnnyAntunesAinda não há avaliações
- Requisitos de segurança elevadorDocumento58 páginasRequisitos de segurança elevadordanielwjrAinda não há avaliações
- Exercicios Hidraulica Prova 1 E2Documento48 páginasExercicios Hidraulica Prova 1 E2aloisiobie2039100% (2)
- Exercicios BombasDocumento31 páginasExercicios BombasJuliana Spagnol Abarca100% (1)
- Projeto de Estação Elevatória de ÁguaDocumento4 páginasProjeto de Estação Elevatória de ÁguaRaimundo LaranjeiraAinda não há avaliações
- Exercicios Hidraulica Prova 3Documento39 páginasExercicios Hidraulica Prova 3Luciano Dalla CorteAinda não há avaliações
- Posto Transformação 400KVA 1050032 1080419Documento23 páginasPosto Transformação 400KVA 1050032 1080419Zé CerqueiraAinda não há avaliações
- Caderno de Encargos de Sistemas ElétricosDocumento39 páginasCaderno de Encargos de Sistemas ElétricosotaviusrochaAinda não há avaliações
- Resposta Numero 8Documento2 páginasResposta Numero 8Jonathan CostaAinda não há avaliações
- 02 Bombas Hidráulicas 2018 2Documento101 páginas02 Bombas Hidráulicas 2018 2Rafael BachAinda não há avaliações
- Exercício 1 2020 VersaoDocumento12 páginasExercício 1 2020 VersaoArthur Caetano100% (1)
- Lista de Exercícios 1 - 1 AvaliaçãoDocumento8 páginasLista de Exercícios 1 - 1 AvaliaçãoMatheus GhettinoAinda não há avaliações
- Lista 04 - Modulação AMDocumento19 páginasLista 04 - Modulação AMLuiz Tsurukawa100% (1)
- O Livro de KinesisDocumento20 páginasO Livro de Kinesisnatalianamarques100% (3)
- Atividade 01Documento2 páginasAtividade 01Michelle MitieAinda não há avaliações
- Controle de processo: exercícios sobre estratégias, modelagem e análise de sistemas de controle por realimentaçãoDocumento18 páginasControle de processo: exercícios sobre estratégias, modelagem e análise de sistemas de controle por realimentaçãoLuiza L. Dos AnjosAinda não há avaliações
- Maquinas HM Potencia-1Documento4 páginasMaquinas HM Potencia-1Guilherme de AndradeAinda não há avaliações
- Termodinâmica aplicada à enginharia químicaDocumento26 páginasTermodinâmica aplicada à enginharia químicaMarcos SouzaAinda não há avaliações
- PFTDocumento43 páginasPFTMaybe LopesAinda não há avaliações
- Primeira aula de Hidráulica I resolvendo questão de exameDocumento16 páginasPrimeira aula de Hidráulica I resolvendo questão de exameValdomiro Ferreira CunhaAinda não há avaliações
- Lista1 009Documento7 páginasLista1 009Maria GabrielaAinda não há avaliações
- Mec Fluidos Parte 2Documento42 páginasMec Fluidos Parte 2Antonio Mota0% (1)
- Aula 6 2024 1Documento63 páginasAula 6 2024 1Tiago MarquesAinda não há avaliações
- Princípios básicos da hidráulicaDocumento4 páginasPrincípios básicos da hidráulicaAna FlorAinda não há avaliações
- Ficha de Trabalho n.2 - HidraulicaDocumento11 páginasFicha de Trabalho n.2 - HidraulicaLoide FurtadoAinda não há avaliações
- Exercícios TransporteDocumento5 páginasExercícios TransporteAntônio Ferreira RosaAinda não há avaliações
- Artigopneumática 1Documento7 páginasArtigopneumática 1Gerson SenaAinda não há avaliações
- Equação da Continuidade: Relação entre Vazão, Área e VelocidadeDocumento15 páginasEquação da Continuidade: Relação entre Vazão, Área e VelocidadeRaphael LopesAinda não há avaliações
- Determinação da vazão e coeficiente de descarga em placa de orifícioDocumento12 páginasDeterminação da vazão e coeficiente de descarga em placa de orifícioGilvan WanderleyAinda não há avaliações
- Lista01 Exercicios-RESOLVIDADocumento7 páginasLista01 Exercicios-RESOLVIDAgustavokleinAinda não há avaliações
- Método de ThiemDocumento64 páginasMétodo de ThiemMatheus-eLarissaBraziellasAinda não há avaliações
- Sistema controle nível fluido tanqueDocumento3 páginasSistema controle nível fluido tanqueCleiton ResendeAinda não há avaliações
- Acqa - Sistemas de Controle IDocumento3 páginasAcqa - Sistemas de Controle ICleiton ResendeAinda não há avaliações
- Curvas características das tubulaçõesDocumento9 páginasCurvas características das tubulaçõesFabiano MachadoAinda não há avaliações
- Estação ElevatóriaDocumento9 páginasEstação ElevatórialuizkozanAinda não há avaliações
- 2 Lista Máq Fluxo Eng. MecânicaDocumento5 páginas2 Lista Máq Fluxo Eng. MecânicaPaulo Guilherme Silva Costa0% (1)
- Material de Apoio 2 - PPT Usado Na Aula de Escoamento de FluidosDocumento18 páginasMaterial de Apoio 2 - PPT Usado Na Aula de Escoamento de FluidospablopohrenAinda não há avaliações
- ZEA0862 Lista de Exercicios 1 2018Documento6 páginasZEA0862 Lista de Exercicios 1 2018Isabela FerreiraAinda não há avaliações
- Lista 2 - Estática Dos FluidosDocumento3 páginasLista 2 - Estática Dos FluidosCâmeraAinda não há avaliações
- Chaminé de equilíbrio: modelo conceitual e equacionamentoDocumento15 páginasChaminé de equilíbrio: modelo conceitual e equacionamentoDaniel PeroniAinda não há avaliações
- Equações de Bernoulli em exercícios de aplicaçõesDocumento8 páginasEquações de Bernoulli em exercícios de aplicaçõesMurilo DioAinda não há avaliações
- MAPA Maquinas de FluxoDocumento10 páginasMAPA Maquinas de FluxoCAMILA ALVES DAMASIOAinda não há avaliações
- MF - Gabarito P1 2010Documento1 páginaMF - Gabarito P1 2010Mariana ChantalAinda não há avaliações
- Prática 6 - Curva Da Bomba e Curva Do Sistema de TubulaçõesDocumento12 páginasPrática 6 - Curva Da Bomba e Curva Do Sistema de Tubulaçõesnandasduarte15Ainda não há avaliações
- Parte Da Aula 2 - Coeficientes e Curvas de Desempenho de TurbinasDocumento37 páginasParte Da Aula 2 - Coeficientes e Curvas de Desempenho de TurbinasRenatodocsAinda não há avaliações
- RevisaoDocumento18 páginasRevisaofelipe_ss14Ainda não há avaliações
- Lista3 Op1Documento3 páginasLista3 Op1Marina CotrinAinda não há avaliações
- 73 78Documento6 páginas73 78Thiago AguiarAinda não há avaliações
- MECÂNICA DOS FLUIDOS: Medidores de pressãoDocumento29 páginasMECÂNICA DOS FLUIDOS: Medidores de pressãoBruno SantosAinda não há avaliações
- Perda de Carga em Tubulações - Dimensionamento e CálculoDocumento36 páginasPerda de Carga em Tubulações - Dimensionamento e CálculoDiêgo MarcosAinda não há avaliações
- Lista de Exercícios 01Documento5 páginasLista de Exercícios 01Victor SoaresAinda não há avaliações
- Curso Eng Civil EADDocumento14 páginasCurso Eng Civil EADfranklinjsAinda não há avaliações
- Análise simplificada do golpe de aríete em tubulações de recalqueDocumento33 páginasAnálise simplificada do golpe de aríete em tubulações de recalqueElias MocbelAinda não há avaliações
- Balanço de EnergiaDocumento3 páginasBalanço de Energiajfeliperr88Ainda não há avaliações
- Entrega 04 - Mec FluDocumento17 páginasEntrega 04 - Mec FluGuilherme Girão CiprianoAinda não há avaliações
- Fluidos IIA-Cálculo de Tubulação para Água Fria-Parte2-2Documento4 páginasFluidos IIA-Cálculo de Tubulação para Água Fria-Parte2-2Rodger SenaAinda não há avaliações
- Gabarito EDS - MFDocumento13 páginasGabarito EDS - MFRenan Paceli100% (2)
- Eficiência de Turbina PeltonDocumento8 páginasEficiência de Turbina PeltonJoão Victor Silva SoaresAinda não há avaliações
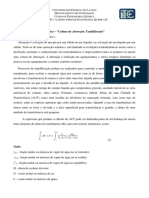
- Prática - Coluna de AbsorçãoDocumento6 páginasPrática - Coluna de AbsorçãoSabrina Brandao RochaAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- UniFOA - Centro Universitário de Volta Redonda Engenharia de Produção Lista 1 Corrente AlternadaDocumento4 páginasUniFOA - Centro Universitário de Volta Redonda Engenharia de Produção Lista 1 Corrente AlternadaMauricio Amauri CamargoAinda não há avaliações
- BOLETIM TÉCNICO PRIMÁRIO TEXTURADODocumento3 páginasBOLETIM TÉCNICO PRIMÁRIO TEXTURADOFilipe Sá CoutoAinda não há avaliações
- Aula 09 - Whirling e M+®todo de RayleighDocumento15 páginasAula 09 - Whirling e M+®todo de RayleighShueidy BragaAinda não há avaliações
- Classificação e tipos de amplificadoresDocumento14 páginasClassificação e tipos de amplificadoresadolfoAinda não há avaliações
- 2 - Trabalho Circuitos ElétricosDocumento7 páginas2 - Trabalho Circuitos ElétricosVictor GabrielAinda não há avaliações
- 01 Lista - Física ModernaDocumento8 páginas01 Lista - Física ModernaNadine SouzaAinda não há avaliações
- UP12400 (40ah)Documento1 páginaUP12400 (40ah)GeorgeAinda não há avaliações
- Ventilação sistemas máquinas elétricasDocumento20 páginasVentilação sistemas máquinas elétricasLauro Da Silva DspAinda não há avaliações
- Solis Datasheet S6-GR1P (0,7-3,6) K-M BRA V2,1 2022 09Documento2 páginasSolis Datasheet S6-GR1P (0,7-3,6) K-M BRA V2,1 2022 09gustavobsouza@yahoo.com.brAinda não há avaliações
- Segunda Lei de NewtonDocumento21 páginasSegunda Lei de NewtonFrancisco MarquesAinda não há avaliações
- Apostila de Operação de Caldeira - Sime IndustrialDocumento120 páginasApostila de Operação de Caldeira - Sime IndustrialLeandro CarvalhoAinda não há avaliações
- Movimento uniformemente variadoDocumento4 páginasMovimento uniformemente variadoAlan MeloAinda não há avaliações
- Cinemática Física IDocumento17 páginasCinemática Física IRAFAELA FERNANDES DE ARAUJOAinda não há avaliações
- Lista3 b1Documento5 páginasLista3 b1welerson ribeiroAinda não há avaliações
- Termodinâmica BásicaDocumento8 páginasTermodinâmica BásicaSelson PereiraAinda não há avaliações
- Relátorio de Visita Técnica - Midway Mall (Tiago Martins)Documento15 páginasRelátorio de Visita Técnica - Midway Mall (Tiago Martins)Tiago Martins0% (1)
- ENADE TermicafluidosDocumento45 páginasENADE TermicafluidosDager MxAinda não há avaliações
- Check List EletricoDocumento1 páginaCheck List EletricoJorge JuniorAinda não há avaliações
- Elementos Passivos-1Documento12 páginasElementos Passivos-1Deejaydeaboazy CpmAinda não há avaliações
- ABNT NBR 13771 Cabos e Fios TermoparesDocumento10 páginasABNT NBR 13771 Cabos e Fios TermoparesBruno BassottiAinda não há avaliações
- Questões de Vestibulares IIDocumento8 páginasQuestões de Vestibulares IIFava6Ainda não há avaliações
- PV Hands ON Versão Resumo 2019Documento263 páginasPV Hands ON Versão Resumo 2019Jamile_P_NAinda não há avaliações
- Checklist de inspeção técnica de quadro elétricoDocumento2 páginasChecklist de inspeção técnica de quadro elétricoJosé LemosAinda não há avaliações