Você também pode gostar
- Potenciação - ExercíciosDocumento1 páginaPotenciação - ExercíciosWELLERSON83% (6)
- 3° Ano - Avaliação Diagnóstica MatDocumento6 páginas3° Ano - Avaliação Diagnóstica Mathanaquel100% (1)
- Transformadas de Laplace - Exercícios PDFDocumento2 páginasTransformadas de Laplace - Exercícios PDFDouglas SilvaAinda não há avaliações
- SociologiaDocumento204 páginasSociologiamaryAinda não há avaliações
- 4) Calcular o Azimute Da Direção 4-5 Sendo - X 4 459,234m X 5 301,459 M. Y 4 233,786 M. Y 5 502,591 MDocumento144 páginas4) Calcular o Azimute Da Direção 4-5 Sendo - X 4 459,234m X 5 301,459 M. Y 4 233,786 M. Y 5 502,591 MGustavo Souza100% (1)
- 1 - Transformação de Funções - 10º.IDocumento6 páginas1 - Transformação de Funções - 10º.IMarisa MontesAinda não há avaliações
- Projeto Spaece 2018 D - 16Documento1 páginaProjeto Spaece 2018 D - 16130702jvAinda não há avaliações
- 2a Lista de Exercicios ESTA004Documento4 páginas2a Lista de Exercicios ESTA004Marcelo Pedro100% (1)
- Lista AnaliseDocumento3 páginasLista AnaliseKaio MenezesAinda não há avaliações
- Geometria Diferencial de Curvas e SuperfíciesDocumento13 páginasGeometria Diferencial de Curvas e SuperfíciesIgor AndradeAinda não há avaliações
- Capítulo 2 - Elemento Finito de Barra e Treliça - Kim e Sankar PDFDocumento53 páginasCapítulo 2 - Elemento Finito de Barra e Treliça - Kim e Sankar PDFcarolinatroyackAinda não há avaliações
- Aula 2 - Mtodo DiretoDocumento25 páginasAula 2 - Mtodo DiretoJulio FilhoAinda não há avaliações
- CALCULO III LISTA EXERCICIOS 5 (Transformada de Laplace) 20181 PDFDocumento3 páginasCALCULO III LISTA EXERCICIOS 5 (Transformada de Laplace) 20181 PDFCaio Felipe CarvalhoAinda não há avaliações
- Ya 1Documento2 páginasYa 1Rodrigo LopesAinda não há avaliações
- 1 - Exercícios de PotenciaçãoDocumento3 páginas1 - Exercícios de PotenciaçãolucassaturnizAinda não há avaliações
- Trabalho de Álgebra Linear IIDocumento3 páginasTrabalho de Álgebra Linear IIMarcos RibeiroAinda não há avaliações
- LaplaceDocumento3 páginasLaplaceBenedito Nelson RovidaAinda não há avaliações
- Trabalho de Álgebra Linear IIDocumento3 páginasTrabalho de Álgebra Linear IIMarcos RibeiroAinda não há avaliações
- Correção 2 Simulado Coesi EspcexDocumento3 páginasCorreção 2 Simulado Coesi Espcexdaniel_licifsAinda não há avaliações
- RESPOSTAS-Exercicio de Fixacao - Unidade 4Documento2 páginasRESPOSTAS-Exercicio de Fixacao - Unidade 4Wagner SarmentoAinda não há avaliações
- Exerc Cios F128 10Documento4 páginasExerc Cios F128 10Geovani Porto De DeusAinda não há avaliações
- Calc 1 - P2Documento9 páginasCalc 1 - P2adryan castroAinda não há avaliações
- MATA04 - Lista 10 - Transformada de LaplaceDocumento5 páginasMATA04 - Lista 10 - Transformada de LaplaceIgor NunesAinda não há avaliações
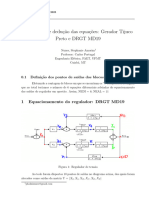
- DRGT MD19 Stephanie Amorim NunesDocumento3 páginasDRGT MD19 Stephanie Amorim NunesStephanie NunesAinda não há avaliações
- Ficha 4 11Documento3 páginasFicha 4 11x4bjs42679Ainda não há avaliações
- 5 Lista de Exerc Cios de C Lculo III Civil-2017.2Documento9 páginas5 Lista de Exerc Cios de C Lculo III Civil-2017.2João Marcos LopesAinda não há avaliações
- 24 Aula de AL - SI - Núcleo de Uma Transformação LinearDocumento5 páginas24 Aula de AL - SI - Núcleo de Uma Transformação LinearVictor BaggioAinda não há avaliações
- Caderno Funçaõ AfimexresDocumento30 páginasCaderno Funçaõ AfimexresGraciela MarquesAinda não há avaliações
- Mat 1107 - CD 4Documento15 páginasMat 1107 - CD 4crisanchespinAinda não há avaliações
- Tabela Das DerivadasDocumento1 páginaTabela Das DerivadasMaria PedrosoAinda não há avaliações
- Apostila Basico QOAMDocumento19 páginasApostila Basico QOAMMarco Aurelio CostaAinda não há avaliações
- SlidesAula Teo19 20 - v2Documento47 páginasSlidesAula Teo19 20 - v2G0tBlackOpsAinda não há avaliações
- Miniteste ExponenciaisDocumento2 páginasMiniteste ExponenciaisMartim NevesAinda não há avaliações
- Funcoes 1jDocumento5 páginasFuncoes 1jJacob CuambaAinda não há avaliações
- 2º Teste Am3c 2 S 21-22Documento12 páginas2º Teste Am3c 2 S 21-22iaf.piresAinda não há avaliações
- Exercicio CASADocumento6 páginasExercicio CASACarlos Eduardo GuerraAinda não há avaliações
- Lista de Matemática FunçõesDocumento1 páginaLista de Matemática FunçõesFv PauloAinda não há avaliações
- 08 07 2021Documento14 páginas08 07 2021Frank WanAinda não há avaliações
- Lista Funções (Resolução)Documento4 páginasLista Funções (Resolução)larissasilvapjcAinda não há avaliações
- FormulárioDocumento5 páginasFormuláriomarianoconstanza7Ainda não há avaliações
- Reta Final Aula 2: Questão 01 - (ESPM SP) Questão 03 - (IBMEC RJ)Documento4 páginasReta Final Aula 2: Questão 01 - (ESPM SP) Questão 03 - (IBMEC RJ)Nickolas NabucoAinda não há avaliações
- Ficha de Preparação 5ºtesteDocumento4 páginasFicha de Preparação 5ºtesteAlda Biscaia SantosAinda não há avaliações
- Mini-Teste ExponeLogorDocumento2 páginasMini-Teste ExponeLogorthebeans34Ainda não há avaliações
- Unidade 1 - Exercícios ComplementaresDocumento5 páginasUnidade 1 - Exercícios ComplementaresRaphael BernardoAinda não há avaliações
- Solucao T3Documento2 páginasSolucao T3Marcello HenriqueAinda não há avaliações
- Lista4 (cm043) (2013 I)Documento2 páginasLista4 (cm043) (2013 I)joaquimgoatAinda não há avaliações
- Trabalho 1Documento4 páginasTrabalho 1Vembe ReisAinda não há avaliações
- Lista 1 SedoDocumento3 páginasLista 1 SedoIzabel FerreiraAinda não há avaliações
- Integral IndefinidaDocumento24 páginasIntegral IndefinidaAlexsandro SantosAinda não há avaliações
- Respostas Dos Exercicios PropostosDocumento25 páginasRespostas Dos Exercicios PropostosCubs4LifeAinda não há avaliações
- Aulas ES710 Discreto CaminoDocumento53 páginasAulas ES710 Discreto CaminoJoao Victor SantosAinda não há avaliações
- Ficha 4Documento10 páginasFicha 4Ana Cristina SilvaAinda não há avaliações
- Lista 2 - CAL02 - ELEDocumento2 páginasLista 2 - CAL02 - ELEMara AngélicaAinda não há avaliações
- Lista9 de Exercícios de Sinais e Sistemas Lineares - Chico Mota UFRNDocumento2 páginasLista9 de Exercícios de Sinais e Sistemas Lineares - Chico Mota UFRNVictor KailloAinda não há avaliações
- Exerc 5Documento5 páginasExerc 5Joaquim Baltazar NgolaAinda não há avaliações
- EM707 Lista 02 2s 2021Documento3 páginasEM707 Lista 02 2s 2021Roger LeiteAinda não há avaliações
- Física1 14Documento12 páginasFísica1 14Péricles CostaAinda não há avaliações
- 2015 10 03 MAT EXT Figueira FunçõesDocumento4 páginas2015 10 03 MAT EXT Figueira FunçõesDaniel LavourasAinda não há avaliações
- Séries de FourierDocumento6 páginasSéries de FourierEsther RodriguesAinda não há avaliações
- 1.1funcoestrigonometricas ExercDocumento7 páginas1.1funcoestrigonometricas ExercSofia FernandesAinda não há avaliações
- Lista de Exercícios - Fourier - IFBaDocumento2 páginasLista de Exercícios - Fourier - IFBaNATÁLIA DE LUCENA FELIXAinda não há avaliações
- Lista 3Documento2 páginasLista 3Sofia BernardoniAinda não há avaliações
- Teste 2Documento17 páginasTeste 2TigresaAinda não há avaliações
- Produto de MatrizesDocumento27 páginasProduto de MatrizesReginaldo Afonso Palma CNAinda não há avaliações
- Media e Extrema Razão - Proporção AureaDocumento6 páginasMedia e Extrema Razão - Proporção AureaSileide PaccolaAinda não há avaliações
- Memórias Da Educação Matemática No BrasilDocumento221 páginasMemórias Da Educação Matemática No BrasilDirceu Zaleski FilhoAinda não há avaliações
- Mat 2º Ano - Planificação AnualDocumento7 páginasMat 2º Ano - Planificação AnualJoana SantosAinda não há avaliações
- Séries de TaylorDocumento18 páginasSéries de TaylorBasilio João Pedro CatongaAinda não há avaliações
- O Valor Dos NúmerosDocumento16 páginasO Valor Dos NúmerosGhalladrianAinda não há avaliações
- 1 - Fundamentos Da AlfabetizaçãoDocumento28 páginas1 - Fundamentos Da AlfabetizaçãoCharles P. SilvaAinda não há avaliações
- Notasde Aulasde Analise Matematica IIIEAD2021 A4 Integralde Contorno 16052021Documento4 páginasNotasde Aulasde Analise Matematica IIIEAD2021 A4 Integralde Contorno 16052021LuisAinda não há avaliações
- ÁBACO - Ficha Acompanhamento1Documento23 páginasÁBACO - Ficha Acompanhamento1Sabino ChapukuaAinda não há avaliações
- Revista Piauí - Ratos No LabirintoDocumento6 páginasRevista Piauí - Ratos No LabirintomiaaaaAinda não há avaliações
- 2019 Matemática III GA: Revisão II Camila ModestoDocumento4 páginas2019 Matemática III GA: Revisão II Camila ModestoAbhnerAinda não há avaliações
- Plim! NL (Mat 2ano) Nov.2021Documento13 páginasPlim! NL (Mat 2ano) Nov.2021Teresa PinaAinda não há avaliações
- Diéli de Campos - ADIÇÃO E SUBTRAÇÃO ATIVIDADES PRÁTICAS PARA O ENSINO DE CÁLCULO NOS ANOS INICIAIS DO ENSINO FUNDAMENTALDocumento115 páginasDiéli de Campos - ADIÇÃO E SUBTRAÇÃO ATIVIDADES PRÁTICAS PARA O ENSINO DE CÁLCULO NOS ANOS INICIAIS DO ENSINO FUNDAMENTALLaisla Mattos VidalAinda não há avaliações
- Guia Matemática Prática Ed 03 2019 PDFDocumento100 páginasGuia Matemática Prática Ed 03 2019 PDFValdeci de AndradeAinda não há avaliações
- Unidade II - Sistemas LinearesDocumento34 páginasUnidade II - Sistemas LinearesJoão Junio NascimentoAinda não há avaliações
- Exercício Análise de Malhas ResolvidoDocumento5 páginasExercício Análise de Malhas ResolvidoOliveira Jr.Ainda não há avaliações
- Atividade 2 - Aula 2 (PRODUTOS NOTÁVEIS e FATORAÇÃO)Documento3 páginasAtividade 2 - Aula 2 (PRODUTOS NOTÁVEIS e FATORAÇÃO)Thiago KercheAinda não há avaliações
- EX MatA635 EE 2017 V1 PDFDocumento8 páginasEX MatA635 EE 2017 V1 PDFRita LourençoAinda não há avaliações
- Sistemas de Numeração Antigos Patricia - Docpdf PDFDocumento24 páginasSistemas de Numeração Antigos Patricia - Docpdf PDFsantos8santos-2Ainda não há avaliações
- 02 - Reproducao-Sp-Matematica-1-Unidade-2-Capitulo-4Documento20 páginas02 - Reproducao-Sp-Matematica-1-Unidade-2-Capitulo-4Cleiton MariaAinda não há avaliações
- Análise Matricial de Viga Contínua PDFDocumento6 páginasAnálise Matricial de Viga Contínua PDFFabinho Juntá Ká Afer TuxáAinda não há avaliações
- Apost Metodos - Quantitativos 2010Documento37 páginasApost Metodos - Quantitativos 2010Emerson Lima100% (1)
- Aula 2 Funções VetoriaisDocumento14 páginasAula 2 Funções VetoriaisPr-Luciano ReisAinda não há avaliações
- I o LeontiefDocumento12 páginasI o LeontiefChizaine BarbosaAinda não há avaliações