Você também pode gostar
- WEG cfw500 Manual Da Comunicacao Modbus Rtu 10001316347 Manual Portugues BR PDFDocumento30 páginasWEG cfw500 Manual Da Comunicacao Modbus Rtu 10001316347 Manual Portugues BR PDFPaulo Cesar ChemelloAinda não há avaliações
- TPW 04 Modbus RtuDocumento70 páginasTPW 04 Modbus RtuGilson PaulattiAinda não há avaliações
- WEG Cfw100 Manual Modbus Rtu 10001787477 Manual Portugues BRDocumento26 páginasWEG Cfw100 Manual Modbus Rtu 10001787477 Manual Portugues BREletrica SERPAinda não há avaliações
- Manual ALCPlus2 Traduzido PortuguesDocumento224 páginasManual ALCPlus2 Traduzido Portuguesiqor valinhos100% (2)
- WEG Cfw700 Manual Da Comunicacao Modbus Rtu 10000832468 Manual Portugues BRDocumento27 páginasWEG Cfw700 Manual Da Comunicacao Modbus Rtu 10000832468 Manual Portugues BRElizandro MouraAinda não há avaliações
- Quadro de Comando Manual de ApresentaçãoDocumento36 páginasQuadro de Comando Manual de ApresentaçãoIranilton Ribas CairesAinda não há avaliações
- Manual Port GPD 315-V7Documento44 páginasManual Port GPD 315-V7Rodrigo Ramajo100% (1)
- WEG Ruw03 Manual Da Unidade Remota Canopen 10003264976 Manual Portugues BRDocumento42 páginasWEG Ruw03 Manual Da Unidade Remota Canopen 10003264976 Manual Portugues BRroneAinda não há avaliações
- 68 - PT - Manual - 1627305221 3400Documento70 páginas68 - PT - Manual - 1627305221 3400Odirley OdyAinda não há avaliações
- WEG ctw900 Manual Da Softplc 10001829265 Manual Portugues BRDocumento28 páginasWEG ctw900 Manual Da Softplc 10001829265 Manual Portugues BRJacksonAinda não há avaliações
- CUADERNODocumento93 páginasCUADERNODiego MoralesAinda não há avaliações
- Manual de Comunicação RS232 - RS485 para CFW-11Documento34 páginasManual de Comunicação RS232 - RS485 para CFW-11SideparAinda não há avaliações
- CFW11 Comunicação RedeDocumento40 páginasCFW11 Comunicação RedeRodrigo CorintoAinda não há avaliações
- WEG cfw500 Manual Da Comunicacao Devicenet 10001316311 Manual Portugues BRDocumento36 páginasWEG cfw500 Manual Da Comunicacao Devicenet 10001316311 Manual Portugues BRRodrigoAinda não há avaliações
- SoftPLC CFW11 Manual de UtilizaçãoDocumento28 páginasSoftPLC CFW11 Manual de UtilizaçãoMoises SantosAinda não há avaliações
- WEG SSW06 Manual de Comunicacao Fieldbus 0899.5843 1.6x PTDocumento38 páginasWEG SSW06 Manual de Comunicacao Fieldbus 0899.5843 1.6x PTWillians BorgesAinda não há avaliações
- Instruções de Funcionamento USCA ST2140-ST2160-ST2180-ST2160Documento550 páginasInstruções de Funcionamento USCA ST2140-ST2160-ST2180-ST2160Jnr Sp100% (11)
- Manual Indicador - Onix 2021Documento138 páginasManual Indicador - Onix 2021Dienio VazAinda não há avaliações
- WEG Cfw700 Manual Da Softplc 10000823401 Manual Portugues BRDocumento28 páginasWEG Cfw700 Manual Da Softplc 10000823401 Manual Portugues BRDaniel SouzaAinda não há avaliações
- WEG cfw500 Manual Da Softplc 10001499063 Manual Portugues BRDocumento28 páginasWEG cfw500 Manual Da Softplc 10001499063 Manual Portugues BRAlexandreSantosAinda não há avaliações
- ANEXO II - Manual EspecificaçõesTécnicas - Danfe-Código-BarrasDocumento28 páginasANEXO II - Manual EspecificaçõesTécnicas - Danfe-Código-BarrasHarley Gomes MachadoAinda não há avaliações
- Manual Operação SmartPrint Rev.03 PDFDocumento118 páginasManual Operação SmartPrint Rev.03 PDFConta SegurançaAinda não há avaliações
- Manual Comunicação Serial RS232-485 PDFDocumento34 páginasManual Comunicação Serial RS232-485 PDFBruno Rafael DreherAinda não há avaliações
- WEG Manual Anybus Profibus DP 10004633610 SSW900 PTDocumento66 páginasWEG Manual Anybus Profibus DP 10004633610 SSW900 PTgilsonrochaandAinda não há avaliações
- Manual Toledo Prix 9098Documento75 páginasManual Toledo Prix 9098alessandro cesarAinda não há avaliações
- Treetech SDV Manual PT 3.01Documento199 páginasTreetech SDV Manual PT 3.01clewerson.torres2Ainda não há avaliações
- Manual Marthe A800 3G PDFDocumento39 páginasManual Marthe A800 3G PDFAnderson Roberto OliveiraAinda não há avaliações
- Man TS8200Documento55 páginasMan TS8200Antonio Laruta ChoqueAinda não há avaliações
- Manual Do Usuário: A Partir Da Versão 2.13ADocumento66 páginasManual Do Usuário: A Partir Da Versão 2.13AMatheus RibasAinda não há avaliações
- WEG Cfw701 Manual Da SoftplcDocumento27 páginasWEG Cfw701 Manual Da SoftplcEmerson Fabiano Carvalho de Oliveira 4153Ainda não há avaliações
- 4100es Guia de Instalação NovaDocumento212 páginas4100es Guia de Instalação NovaDiego SantosAinda não há avaliações
- Protocolo ModbusDocumento40 páginasProtocolo ModbusHenrique Gonzaga100% (1)
- 4.1.apendice C.PSR GIZ - Armazenamento - Relatorio 1 - Tecnologias de ArmazenamentoDocumento90 páginas4.1.apendice C.PSR GIZ - Armazenamento - Relatorio 1 - Tecnologias de ArmazenamentoIvana Costa NasserAinda não há avaliações
- SCA06 Manual Da Comunicação CANopenDocumento66 páginasSCA06 Manual Da Comunicação CANopenAnderson Ricardo PradoAinda não há avaliações
- Guia de Configuração - PON LAN - V1.0.4Documento31 páginasGuia de Configuração - PON LAN - V1.0.4charlesfrederico210995Ainda não há avaliações
- Manual Fieldlogger PortuguesDocumento104 páginasManual Fieldlogger Portuguesabsu2278100% (1)
- Manual Catraca MD 1901 R.00Documento43 páginasManual Catraca MD 1901 R.00suporte3 .salvadorAinda não há avaliações
- Manual de Apresentacao Comando MC4R HDDocumento30 páginasManual de Apresentacao Comando MC4R HDTiago ValenteAinda não há avaliações
- Manual de Operação: Conversor de Frequência Movitrac LTE-B+Documento132 páginasManual de Operação: Conversor de Frequência Movitrac LTE-B+Marcio BastosAinda não há avaliações
- WEG Cfw700 Manual Softplc Funcoes de CLP 10000823401 Manual Portugues BRDocumento27 páginasWEG Cfw700 Manual Softplc Funcoes de CLP 10000823401 Manual Portugues BRThiago PiresAinda não há avaliações
- Guia de Referencia D 68390 Painel DigitauDocumento54 páginasGuia de Referencia D 68390 Painel DigitauSuporte Injeletro DieselAinda não há avaliações
- Treetech SDV Manual PT 1.11Documento200 páginasTreetech SDV Manual PT 1.11Rafael FehlbergAinda não há avaliações
- MOC MDFe VisaoGeral v3.00bcdDocumento82 páginasMOC MDFe VisaoGeral v3.00bcdBruno Felipe Canale.Ainda não há avaliações
- MOC CTe VisaoGeral V3.00aDocumento153 páginasMOC CTe VisaoGeral V3.00aThais FigueredoAinda não há avaliações
- Manual Fieldlogger PortuguêsDocumento105 páginasManual Fieldlogger Portuguêscidao69Ainda não há avaliações
- WEG cvw300 Manual Portugues PTDocumento26 páginasWEG cvw300 Manual Portugues PTJoão Carlos VieiraAinda não há avaliações
- Apostila de Redes IDEIADocumento62 páginasApostila de Redes IDEIApri_anjosAinda não há avaliações
- WEG Ruw06 Manual Unidade de Controle Canopen 10002213831 Manual Portugues BRDocumento44 páginasWEG Ruw06 Manual Unidade de Controle Canopen 10002213831 Manual Portugues BRHelio FerreiraAinda não há avaliações
- WEG cfw11 Manual Da Comunicacao Serial rs232 rs485 0899.5740 Manual Portugues BR PDFDocumento34 páginasWEG cfw11 Manual Da Comunicacao Serial rs232 rs485 0899.5740 Manual Portugues BR PDFglbramalho9655Ainda não há avaliações
- West 6100 PDFDocumento61 páginasWest 6100 PDFJorge Dutra David JúniorAinda não há avaliações
- Instruções de Operação: Movitrac BDocumento260 páginasInstruções de Operação: Movitrac BFatos GenuínosAinda não há avaliações
- WEG Manual Anybus Ethernet Ip 10004627467 SSW900 PTDocumento73 páginasWEG Manual Anybus Ethernet Ip 10004627467 SSW900 PTgabrielmppessoaAinda não há avaliações
- WEG SSW900 Ethernet 1.4x Manual Do Usuario 10008083257 PTDocumento81 páginasWEG SSW900 Ethernet 1.4x Manual Do Usuario 10008083257 PTArnaldo RosaAinda não há avaliações
- Manual Do Usuário: SplitãoDocumento149 páginasManual Do Usuário: SplitãoosielparentedassilvaAinda não há avaliações
- Manual Nodal v45Documento124 páginasManual Nodal v45Manuel BouzasAinda não há avaliações
- Guia de Aplicação - MC-DUR 1322 - 2022Documento37 páginasGuia de Aplicação - MC-DUR 1322 - 2022Gabriel NerisAinda não há avaliações
- Manual - FileDocumento142 páginasManual - FileLeandro P SilvaAinda não há avaliações
- 42,0426,0114, PBDocumento256 páginas42,0426,0114, PBJosé CoelhoAinda não há avaliações
- Aula 7 - Geometria 1Documento26 páginasAula 7 - Geometria 1Assad TubagiAinda não há avaliações
- Fundamentos Da Higiene OcupacionalDocumento32 páginasFundamentos Da Higiene OcupacionaljheimissonAinda não há avaliações
- Ar Condicionado PDFDocumento28 páginasAr Condicionado PDFpaulo102030Ainda não há avaliações
- D2 Matemática SAEB - PENSE EXATODocumento43 páginasD2 Matemática SAEB - PENSE EXATOfbmendesAinda não há avaliações
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Documento1 páginaDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroAinda não há avaliações
- Atividade de Recuperação Paralela 3 AnoDocumento1 páginaAtividade de Recuperação Paralela 3 AnofelupealmeidqAinda não há avaliações
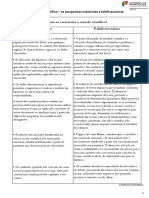
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDocumento2 páginasO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraAinda não há avaliações
- Análise Real 1Documento45 páginasAnálise Real 1Valdirene M. FerreiraAinda não há avaliações
- 4GL Manual PDFDocumento65 páginas4GL Manual PDFMaique AlmeidaAinda não há avaliações
- Introdução À EnzimologiaDocumento23 páginasIntrodução À EnzimologiaFrancisco Oliveira100% (2)
- De Stijl ManifestoDocumento2 páginasDe Stijl ManifestoRogeri O LiveiraAinda não há avaliações
- Mineracao Desmonte e Estabilidade de Rochas PDFDocumento79 páginasMineracao Desmonte e Estabilidade de Rochas PDFEliezer GouvêaAinda não há avaliações
- Componentes Do Tubo de Raios X - Fisica Da RadiologiaDocumento16 páginasComponentes Do Tubo de Raios X - Fisica Da RadiologiajacksongalvaoAinda não há avaliações
- Atividade Prática - PPII - ELE - 1Documento4 páginasAtividade Prática - PPII - ELE - 1Henrique Marques100% (1)
- Lista 2 GPEDocumento9 páginasLista 2 GPEHallex OwenAinda não há avaliações
- NBR5261Documento5 páginasNBR5261Geovane CostaAinda não há avaliações
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDocumento69 páginasEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROAinda não há avaliações
- 2 Lista de Exercícios de Química Do 3o Ano (2013)Documento6 páginas2 Lista de Exercícios de Química Do 3o Ano (2013)Valério LondeAinda não há avaliações
- Questões Sobre Escala CartográficaDocumento6 páginasQuestões Sobre Escala CartográficaGETULIO VICENTE VIEIRA MENEZESAinda não há avaliações
- Furadeira e ParafusadeiraDocumento9 páginasFuradeira e ParafusadeiraMarcelo LucasAinda não há avaliações
- Exemplo3.TCC AgrupamentoDocumento26 páginasExemplo3.TCC AgrupamentotalesfdsAinda não há avaliações
- Matemática Anos IniciaisDocumento37 páginasMatemática Anos IniciaisMaria Helena Souza100% (1)
- Eletrotécnica - P3-G1 - EMC - 2008-1Documento2 páginasEletrotécnica - P3-G1 - EMC - 2008-1AllanAinda não há avaliações
- Verificando MD5 e SHA-256 de Arquivos Pelo Terminal No LinuxDocumento3 páginasVerificando MD5 e SHA-256 de Arquivos Pelo Terminal No LinuxMarcos PaparaziAinda não há avaliações
- Aula 1 2 e 3 - Etiopatogênese Geral Das LesõesDocumento21 páginasAula 1 2 e 3 - Etiopatogênese Geral Das Lesõescamilla fAinda não há avaliações
- TEMA 2 - Outros Compostos QuímicaDocumento65 páginasTEMA 2 - Outros Compostos QuímicaAlexandre studiesAinda não há avaliações
- FichasDocumento1 páginaFichasCatarina FernandesAinda não há avaliações
- Nivelamento - Eletricidade BásicaDocumento52 páginasNivelamento - Eletricidade BásicaNayara MercesAinda não há avaliações
- Brousseau G. SlidesDocumento67 páginasBrousseau G. SlidesE_RCARVALHO100% (1)
- Teste - MecânicaDocumento6 páginasTeste - MecânicaLuciana SilvaAinda não há avaliações
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- Trincas e Fissuras em Edificações: causadas por recalques diferenciaisNo EverandTrincas e Fissuras em Edificações: causadas por recalques diferenciaisAinda não há avaliações
- Comandos ElétricosNo EverandComandos ElétricosAinda não há avaliações
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Tudo Sobre A Tecnologia Blockchain: O Guia Mais Completo Para Iniciantes Sobre Carteira Blockchain, Bitcoin, Ethereum, Ripple, DashNo EverandTudo Sobre A Tecnologia Blockchain: O Guia Mais Completo Para Iniciantes Sobre Carteira Blockchain, Bitcoin, Ethereum, Ripple, DashAinda não há avaliações
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Modelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisNo EverandModelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisAinda não há avaliações
- Roadmap back-end: Conhecendo o protocolo HTTP e arquiteturas RESTNo EverandRoadmap back-end: Conhecendo o protocolo HTTP e arquiteturas RESTNota: 4.5 de 5 estrelas4.5/5 (2)
- Gestão de Projetos e Lean Construction:: Uma Abordagem Prática e IntegradaNo EverandGestão de Projetos e Lean Construction:: Uma Abordagem Prática e IntegradaNota: 5 de 5 estrelas5/5 (2)
- HACKED: O Livro Guia Definitivo De Linux Kali E Hacking Sem Fio Com Ferramentas De Testes De Segurança E DeNo EverandHACKED: O Livro Guia Definitivo De Linux Kali E Hacking Sem Fio Com Ferramentas De Testes De Segurança E DeAinda não há avaliações
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Nr-12 - Segurança No Trabalho Em Máquinas E EquipamentosNo EverandNr-12 - Segurança No Trabalho Em Máquinas E EquipamentosAinda não há avaliações
- Administração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNo EverandAdministração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNota: 5 de 5 estrelas5/5 (1)
- Gerenciamento da rotina do trabalho do dia-a-diaNo EverandGerenciamento da rotina do trabalho do dia-a-diaNota: 5 de 5 estrelas5/5 (2)
- Caixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasNo EverandCaixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasAinda não há avaliações
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Orientação a Objetos: Aprenda seus conceitos e suas aplicabilidades de forma efetivaNo EverandOrientação a Objetos: Aprenda seus conceitos e suas aplicabilidades de forma efetivaNota: 5 de 5 estrelas5/5 (3)