Você também pode gostar
- Artigo Edao-Comp - Reg - Primária - Cenários - Baixa - Hidraulicidade PDFDocumento15 páginasArtigo Edao-Comp - Reg - Primária - Cenários - Baixa - Hidraulicidade PDFgdcerq8134Ainda não há avaliações
- Controle e Proteção de Geradores-2Documento35 páginasControle e Proteção de Geradores-2Erique Soares100% (4)
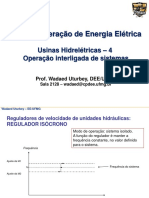
- UsinasHidro 4-EstatismoDocumento18 páginasUsinasHidro 4-EstatismoJoão Igor AndradeAinda não há avaliações
- Aula7 PDFDocumento26 páginasAula7 PDFzepeu1Ainda não há avaliações
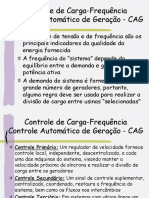
- Controle Primario FrequenciaDocumento12 páginasControle Primario FrequenciafuiazinhaAinda não há avaliações
- Aula 1 Generalidades Sobre COSE UZDocumento16 páginasAula 1 Generalidades Sobre COSE UZZeferino António SaraivaAinda não há avaliações
- Regulação de Velocidade e Tensão em Geradores SíncronosDocumento12 páginasRegulação de Velocidade e Tensão em Geradores SíncronosRoger Halmenschlager da Silva100% (3)
- Fontes Ininterruptas de EnergiaDocumento11 páginasFontes Ininterruptas de EnergiaDANIEL ALMEIDAAinda não há avaliações
- EstabDocumento32 páginasEstabTaumar MoraisAinda não há avaliações
- Apostila 1 Parte 1Documento101 páginasApostila 1 Parte 1Marcelo Lopes SalvadorAinda não há avaliações
- Ajuste de Estabilizadores de Sistemas de Potência Utilizando Algoritmos Bio-InspiradosDocumento17 páginasAjuste de Estabilizadores de Sistemas de Potência Utilizando Algoritmos Bio-InspiradosDouglas SilvaAinda não há avaliações
- ArtigoGeracao ControledeFrequencianoSEPDocumento6 páginasArtigoGeracao ControledeFrequencianoSEPgustavo silvaAinda não há avaliações
- Qualidade de Energia Disturbios A2Documento20 páginasQualidade de Energia Disturbios A2Carolina WanzelerAinda não há avaliações
- Disturbios Que Afetam A Qualidade de EnergiaDocumento20 páginasDisturbios Que Afetam A Qualidade de Energialuizcfarkas5401100% (3)
- Acionamentos Elétricos: Inversores de FrequênciaDocumento13 páginasAcionamentos Elétricos: Inversores de FrequênciaMaikon Lucian LenzAinda não há avaliações
- Estabilidade de Sistemas de PotênciaDocumento56 páginasEstabilidade de Sistemas de PotênciaGilberto SalesAinda não há avaliações
- SBAV10pp48-58energia Aeolica SPWMDocumento11 páginasSBAV10pp48-58energia Aeolica SPWMrafa_preussAinda não há avaliações
- ApostilaSEP IDocumento125 páginasApostilaSEP INathalia OliveiraAinda não há avaliações
- Sincronização de Geradores Com Rede Publica-ATSDocumento5 páginasSincronização de Geradores Com Rede Publica-ATSËnesson VicenteAinda não há avaliações
- Operação Interligada de Sistemas ElétricosDocumento9 páginasOperação Interligada de Sistemas ElétricosAAFDZ_Henrique100% (1)
- Sincronização de Geradores Com Rede Publica-ATS-1Documento5 páginasSincronização de Geradores Com Rede Publica-ATS-1Ënesson VicenteAinda não há avaliações
- Regulacao de Velocidade - ComandoDocumento11 páginasRegulacao de Velocidade - ComandoAldair Latifo Jamal LinoAinda não há avaliações
- Qualidade de Energia Elétrica - PRODIST 8Documento15 páginasQualidade de Energia Elétrica - PRODIST 8Rodrigo AlvesAinda não há avaliações
- Estudo EólicaDocumento14 páginasEstudo EólicaThaís CamposAinda não há avaliações
- Treinamento ST2000P - E30Documento465 páginasTreinamento ST2000P - E30Marcos Carvalho100% (3)
- UNIDADE 4 - Malhas de Controle No Sistema de GeraçãoDocumento15 páginasUNIDADE 4 - Malhas de Controle No Sistema de GeraçãoJhon AraujoAinda não há avaliações
- Feedforward - ControleDocumento8 páginasFeedforward - ControleGleydson NevesAinda não há avaliações
- Estabilidade de Sistemas de PotênciaDocumento92 páginasEstabilidade de Sistemas de PotênciaNilo DantasAinda não há avaliações
- Curso Regulação de TurbinasDocumento42 páginasCurso Regulação de TurbinasKiko OliveiraAinda não há avaliações
- Avaliação Geração CEFET (Vitor Modesto e Vinicius Fernandes)Documento5 páginasAvaliação Geração CEFET (Vitor Modesto e Vinicius Fernandes)ModestoAinda não há avaliações
- Relatório 3 LarissaDocumento8 páginasRelatório 3 LarissalarissamelloeelAinda não há avaliações
- Automação II - Relatório Experimento Inversor de FrequenciaDocumento8 páginasAutomação II - Relatório Experimento Inversor de FrequenciaPhillipe S. ScofieldAinda não há avaliações
- Mapa Analise de Sistemas de Potencia Walter B C JuniorDocumento11 páginasMapa Analise de Sistemas de Potencia Walter B C Juniorwbarco93Ainda não há avaliações
- Manual PWM Completo (Mecatronicadegaragem - Blogspot.com)Documento6 páginasManual PWM Completo (Mecatronicadegaragem - Blogspot.com)Rodrigo CedrimAinda não há avaliações
- Tecnica de Controle de Potencia Ativa e Reativa Utilizando Gerador de Inducao Gaiola de Esquilo em Um Sistema de Gera de Energia Operando em Velocidade VarDocumento11 páginasTecnica de Controle de Potencia Ativa e Reativa Utilizando Gerador de Inducao Gaiola de Esquilo em Um Sistema de Gera de Energia Operando em Velocidade VarRenato SilvaAinda não há avaliações
- Compreendendo Como Um Regulador de Tensão FuncionaDocumento19 páginasCompreendendo Como Um Regulador de Tensão FuncionaSuzane Alves GuimarãesAinda não há avaliações
- Artigo Final Levitador Magnetico Cobenge 2004Documento12 páginasArtigo Final Levitador Magnetico Cobenge 2004Victor CastroAinda não há avaliações
- Reg CumminsDocumento3 páginasReg CumminsEvandro Lino100% (2)
- Relatorio de MecFluDocumento12 páginasRelatorio de MecFluBrailleEcran ProjetoAinda não há avaliações
- Simultaneous Tuning of AVR and PSS Using Particle Swarm Optimization With Two StagesDocumento8 páginasSimultaneous Tuning of AVR and PSS Using Particle Swarm Optimization With Two StagesLê Trung DũngAinda não há avaliações
- Cies2020 1 6110Documento8 páginasCies2020 1 6110LUCAS HAASAinda não há avaliações
- Resumo Sistemas de ControleDocumento11 páginasResumo Sistemas de ControleKarine TavaresAinda não há avaliações
- 4 Aula Pratica Com Inversor de FrequenciaDocumento26 páginas4 Aula Pratica Com Inversor de FrequenciaEverton LuisAinda não há avaliações
- Controle de Servomotores CCDocumento27 páginasControle de Servomotores CCFernando Henrique G. Zucatelli100% (1)
- Estudo Sobre O Funcionamento E Operação de Geradores Como Compensadores Síncronos, Interligados Ao Sin, Na Uhe - Barra GrandeDocumento11 páginasEstudo Sobre O Funcionamento E Operação de Geradores Como Compensadores Síncronos, Interligados Ao Sin, Na Uhe - Barra GrandeDavid RibeiroAinda não há avaliações
- Regulação de Velocidade de Um MCC Através Do Controle Da Corrente de Armadura, Utilizando Lógica FuzzyDocumento5 páginasRegulação de Velocidade de Um MCC Através Do Controle Da Corrente de Armadura, Utilizando Lógica FuzzyBruno SantosAinda não há avaliações
- Paralelismo de AlternadoresDocumento6 páginasParalelismo de AlternadoresCláudio JúniorAinda não há avaliações
- 1 s2.0 S0378779622002115 MainDocumento10 páginas1 s2.0 S0378779622002115 Mainrathvascaino rathAinda não há avaliações
- Estabilidade Nos SEPDocumento2 páginasEstabilidade Nos SEPBoladeiro Das RuasAinda não há avaliações
- Matéria SEP PDFDocumento4 páginasMatéria SEP PDFjtmercesAinda não há avaliações
- Qualidade Energia Elétrica 2Documento20 páginasQualidade Energia Elétrica 2apofAinda não há avaliações
- Sistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesNo EverandSistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesAinda não há avaliações
- Implementando Um Soft-starter Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Fórmulas e Cálculos para Eletricidade e Eletrônica - volume 1No EverandFórmulas e Cálculos para Eletricidade e Eletrônica - volume 1Nota: 5 de 5 estrelas5/5 (5)
- Implementando Um Soft-starter Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Implementando Um Conversor Mono->tri Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Conversor Mono->tri Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- 15 Exercicios Robotica - USFDocumento2 páginas15 Exercicios Robotica - USFJoao Alex100% (1)
- Check List Lixadeira - EsmerilhadeiraDocumento5 páginasCheck List Lixadeira - EsmerilhadeiramarcusAinda não há avaliações
- Dialogos Da Fluencia PDFDocumento26 páginasDialogos Da Fluencia PDFApóstola Elis RoveniaAinda não há avaliações
- Introdução A Banco de Dados Modelagem Lógica - Introdução: I, C T CDocumento21 páginasIntrodução A Banco de Dados Modelagem Lógica - Introdução: I, C T CEdinelson Sousa JuniorAinda não há avaliações
- Nf-E 4024 Luiz Carlos FigueiredoDocumento1 páginaNf-E 4024 Luiz Carlos FigueiredoAllan Higor Da silva ARAinda não há avaliações
- MICRONTROLADORESEIOTUNI3Resistividade1 - 20220210150444 (21Documento4 páginasMICRONTROLADORESEIOTUNI3Resistividade1 - 20220210150444 (21Ronaldo AlbinoAinda não há avaliações
- 21 Geodetic GT2Documento16 páginas21 Geodetic GT2Vanderson OliveiraAinda não há avaliações
- Gestao+e+infraestrutura+em+tiDocumento14 páginasGestao+e+infraestrutura+em+tiJonathan VieciliAinda não há avaliações
- Regua TQSDocumento1 páginaRegua TQSjoão batista alves dos SantosAinda não há avaliações
- Ficha7 HTMLDocumento1 páginaFicha7 HTMLjoaquina CouveAinda não há avaliações
- Apostila - Módulo 1 - Bootcamp Analista de Ataque CibernéticoDocumento44 páginasApostila - Módulo 1 - Bootcamp Analista de Ataque Cibernéticoleomoura20Ainda não há avaliações
- Interligação de RedesDocumento33 páginasInterligação de RedesEdmilson VeigaAinda não há avaliações
- 08 - Perito Criminal de Classe A Nivel I - Engenharia Eletrica - Tipo ADocumento28 páginas08 - Perito Criminal de Classe A Nivel I - Engenharia Eletrica - Tipo AMelk OliveiraAinda não há avaliações
- IntroCyberv2.1 Chp2 Instructor Supplemental MaterialDocumento18 páginasIntroCyberv2.1 Chp2 Instructor Supplemental MaterialRaysa BatistaAinda não há avaliações
- Treinamento Educacenso 2023Documento77 páginasTreinamento Educacenso 2023Andriele SantanaAinda não há avaliações
- Ds Ruckus r610 PT BRDocumento6 páginasDs Ruckus r610 PT BRRegivaldo PereiraAinda não há avaliações
- Introdução Ao AutoCAD 2D ATFDocumento3 páginasIntrodução Ao AutoCAD 2D ATFMárcia Vargas67% (3)
- UFCD 10870 Administração de CRM ÍndiceDocumento3 páginasUFCD 10870 Administração de CRM ÍndiceMANUAIS FORMAÇÃOAinda não há avaliações
- Prova Geral OkDocumento4 páginasProva Geral OkRo BertoAinda não há avaliações
- Calcular Perimetros e Areas Fundamental 1Documento2 páginasCalcular Perimetros e Areas Fundamental 1Taina PsilvaAinda não há avaliações
- Requisição - FrescosDocumento382 páginasRequisição - FrescosGonçalo NevesAinda não há avaliações
- Plano de Teste Zexel 104741-5323Documento2 páginasPlano de Teste Zexel 104741-5323Junior IungAinda não há avaliações
- CENTRO DOOSAN Fanuc DDocumento108 páginasCENTRO DOOSAN Fanuc DJosé Eduardo Barbosa de FreitasAinda não há avaliações
- WRN 240i Roteador WirelessDocumento3 páginasWRN 240i Roteador WirelessFernando FerreiraAinda não há avaliações
- Placas de ExpansãoDocumento10 páginasPlacas de ExpansãoVanessa PereiraAinda não há avaliações
- Diagramas de Classes-1Documento44 páginasDiagramas de Classes-1paulo sergioAinda não há avaliações
- SAP ScriptDocumento40 páginasSAP ScriptFernando JuniorAinda não há avaliações
- CSE - Conectividade Social - Empregador CamilaDocumento1 páginaCSE - Conectividade Social - Empregador CamilaJ Reis Serviços AutomotivosAinda não há avaliações
- C0197-14 - Ford Ka 2015 Dica de Instalação Do Alarme Keyless - PVDocumento1 páginaC0197-14 - Ford Ka 2015 Dica de Instalação Do Alarme Keyless - PVLuis SacucheAinda não há avaliações
- Exp 1 - VerilogDocumento7 páginasExp 1 - VerilogGabriel NazarioAinda não há avaliações