Você também pode gostar
- Instalações Elétricas de BTDocumento63 páginasInstalações Elétricas de BTNando PenhaAinda não há avaliações
- Desenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoNo EverandDesenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoAinda não há avaliações
- Eletricista Industrial - Avaliação 1Documento13 páginasEletricista Industrial - Avaliação 1TecsgemersonAinda não há avaliações
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Apostila Curso Instalação de Sistema Fotovoltaico Conectado A RedeDocumento24 páginasApostila Curso Instalação de Sistema Fotovoltaico Conectado A RedeArlindo Jorge Dos Santos ColaresAinda não há avaliações
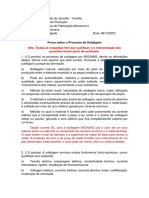
- Prova de SoldagemDocumento4 páginasProva de SoldagemVitor DelgadoAinda não há avaliações
- Foucault-Segurança Território e PopulaçãoDocumento295 páginasFoucault-Segurança Território e PopulaçãoSamira Ávila100% (1)
- Resumo Aula 01 - Introdução e Temas GeraisDocumento45 páginasResumo Aula 01 - Introdução e Temas GeraisJÉSSICA NascimentoAinda não há avaliações
- Catálogo SaneamentoDocumento8 páginasCatálogo SaneamentoRinaldo CamargoAinda não há avaliações
- Lista de Exercicios Segurança PDFDocumento2 páginasLista de Exercicios Segurança PDFElton FlorentinoAinda não há avaliações
- Associação de resistores em série, paralelo e mistaDocumento101 páginasAssociação de resistores em série, paralelo e mistaRafael Bán Jacobsen100% (1)
- Classificação e tipos de turbinas hidráulicasDocumento101 páginasClassificação e tipos de turbinas hidráulicasDiego araujoAinda não há avaliações
- 4580 - Energia SolarDocumento2 páginas4580 - Energia SolarAnge Carreira100% (1)
- Matriz de Referencia - EletrotécnicaDocumento1 páginaMatriz de Referencia - EletrotécnicaLeandro TerossiAinda não há avaliações
- Sistema de Irrigação Inteligente para Agricultura FamiliarDocumento46 páginasSistema de Irrigação Inteligente para Agricultura FamiliarAbubacarMassuqueAinda não há avaliações
- Atividade Contextualizada - Fundamentos de Resistencia Dos MateriaisDocumento2 páginasAtividade Contextualizada - Fundamentos de Resistencia Dos MateriaisClístenes OliveiraAinda não há avaliações
- Relatório de Inspeção de Extintores e HidrantesDocumento10 páginasRelatório de Inspeção de Extintores e HidrantesVictor OliveiraAinda não há avaliações
- Projeto técnico de SPDA para sistema de proteçãoDocumento1 páginaProjeto técnico de SPDA para sistema de proteçãotheresaAinda não há avaliações
- Instalação de Cancelas e Estação de Controle para EstacionamentosDocumento79 páginasInstalação de Cancelas e Estação de Controle para EstacionamentosCláudio Martins0% (1)
- Instalações Elétricas Prediais: Simbologia de ProjetosDocumento77 páginasInstalações Elétricas Prediais: Simbologia de ProjetosNuno HenriquesAinda não há avaliações
- Apostila de Análise de SistemasDocumento143 páginasApostila de Análise de SistemasgeraldosanttosAinda não há avaliações
- SmartLogger3000 Manual Do UsuárioDocumento289 páginasSmartLogger3000 Manual Do UsuárioAlsouza26Ainda não há avaliações
- Plano manutenção equipamentos elétricos AraucáriaDocumento3 páginasPlano manutenção equipamentos elétricos Araucáriawagner titoAinda não há avaliações
- COM309 - Comunicação e Comunidade na Roça da Sabina durante a pandemiaDocumento16 páginasCOM309 - Comunicação e Comunidade na Roça da Sabina durante a pandemiaIan Carlos dos Santos Chagas Tosta100% (1)
- Roteiro LabDocumento18 páginasRoteiro LabJonatas MenezesAinda não há avaliações
- TCC Engenharia Elétrica 4Documento32 páginasTCC Engenharia Elétrica 4Marcelo AraújoAinda não há avaliações
- MBA em Projeto, Execução e Controle de Estruturas e FundaçõesDocumento6 páginasMBA em Projeto, Execução e Controle de Estruturas e FundaçõesAndersonRodriguesAinda não há avaliações
- Conceitos Basicos de Instrumentação e Controle de Processos - SENAI - MGDocumento41 páginasConceitos Basicos de Instrumentação e Controle de Processos - SENAI - MGElio Franklin O Tavares100% (1)
- Quadro de Distribuição LuxuryDocumento12 páginasQuadro de Distribuição LuxuryMarco Valle Placidina Ferreira de SousaAinda não há avaliações
- Compilado Desenho de PerspectivaDocumento15 páginasCompilado Desenho de PerspectivaRicardo Braga LouAinda não há avaliações
- Medição de instrumentos elétricosDocumento5 páginasMedição de instrumentos elétricosAlysson DomingosAinda não há avaliações
- AULA Fatores Ambientais PDFDocumento38 páginasAULA Fatores Ambientais PDFFernanda Paola ButarelliAinda não há avaliações
- Normas ABNT Sobre Instalações Elétricas PDFDocumento3 páginasNormas ABNT Sobre Instalações Elétricas PDFSchwedler Andréia YuriAinda não há avaliações
- Mesa didática torçãoDocumento41 páginasMesa didática torçãoMaxwell LourençoAinda não há avaliações
- Transmissao Corrente AlternadaDocumento11 páginasTransmissao Corrente AlternadaEd TrawtmamAinda não há avaliações
- UFU - Eletrônica DigitalDocumento4 páginasUFU - Eletrônica DigitallordtalgAinda não há avaliações
- Atuadores PneumáticosDocumento11 páginasAtuadores PneumáticosIgor De Albuquerque AnunciaçãoAinda não há avaliações
- PPC Engenharia Elétrica IFS-SeDocumento103 páginasPPC Engenharia Elétrica IFS-SeBernardinhoAinda não há avaliações
- As mudanças climáticas e seus impactos no setor elétrico brasileiroDocumento15 páginasAs mudanças climáticas e seus impactos no setor elétrico brasileirowindowAinda não há avaliações
- Guia rápido para montagem do padrão de energia elétrica em baixa tensãoDocumento1 páginaGuia rápido para montagem do padrão de energia elétrica em baixa tensãoVandrossmdb MirandaAinda não há avaliações
- Multivibradores em 40Documento26 páginasMultivibradores em 40Marco CapozzoliAinda não há avaliações
- Abrangência e Aplicação Da NBR 5419-2015 - Final - Correções EmailDocumento73 páginasAbrangência e Aplicação Da NBR 5419-2015 - Final - Correções EmailVinícius PassosAinda não há avaliações
- Avaliação de Raciocínio Lógico e Análise de DadosDocumento5 páginasAvaliação de Raciocínio Lógico e Análise de DadosExtreme BrawlAinda não há avaliações
- Medir com multímetroDocumento8 páginasMedir com multímetroLuiz OttávioAinda não há avaliações
- PT - dt.Pdn.03.14.003 Instalação QDCDocumento11 páginasPT - dt.Pdn.03.14.003 Instalação QDCPaulo BispoAinda não há avaliações
- Atividade 2 - Ciências Do Ambiente - 52 2023Documento4 páginasAtividade 2 - Ciências Do Ambiente - 52 2023Gustavo KonishAinda não há avaliações
- Sistemas de distribuição de energia elétricaDocumento27 páginasSistemas de distribuição de energia elétricacamilinhabantuAinda não há avaliações
- 741Documento6 páginas741Hugo Henrique AraújoAinda não há avaliações
- Relatório de Microbiologia - EnterobactériasDocumento10 páginasRelatório de Microbiologia - EnterobactériasEmily SantanaAinda não há avaliações
- ESTATISTICADocumento20 páginasESTATISTICAu2861825Ainda não há avaliações
- Aula 1 - Projetos ElétricosDocumento113 páginasAula 1 - Projetos ElétricosVitor Onofre100% (1)
- Trabalho ABNT NBR 10067-1995Documento38 páginasTrabalho ABNT NBR 10067-1995andrefragaAinda não há avaliações
- MaremotrizDocumento27 páginasMaremotrizAna Lara GrassiAinda não há avaliações
- 02 - Noções de MetrologiaDocumento10 páginas02 - Noções de MetrologiaRenan Reis FarinhaAinda não há avaliações
- Manual G-Tech LiteDocumento48 páginasManual G-Tech LiteassistenciainbrazilAinda não há avaliações
- Conceitos básicos de eletricidade, segurança e ferramentas do eletricistaDocumento8 páginasConceitos básicos de eletricidade, segurança e ferramentas do eletricistafatimalfredoAinda não há avaliações
- COMTRAFO Pedestal FinalDocumento2 páginasCOMTRAFO Pedestal FinalWando ToebeAinda não há avaliações
- Atividade Avaliativa - 2Documento4 páginasAtividade Avaliativa - 2SEBASTIAO THIAGO PORTO MARQUESAinda não há avaliações
- Máquina térmica de Carnot entre 800K e 470KDocumento4 páginasMáquina térmica de Carnot entre 800K e 470KtayAinda não há avaliações
- TCC IluminaçãoDocumento115 páginasTCC IluminaçãorapozaazulAinda não há avaliações
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNo EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoAinda não há avaliações
- Os 6 Principais Tipos de Robôs IndustriaisDocumento8 páginasOs 6 Principais Tipos de Robôs Industriaisrenato camposAinda não há avaliações
- Procura-se calopsita desaparecida PiuDocumento1 páginaProcura-se calopsita desaparecida PiuDaniel OliveiraAinda não há avaliações
- T Cnico de Automa o 1651004848Documento1 páginaT Cnico de Automa o 1651004848Daniel OliveiraAinda não há avaliações
- 83763Documento6 páginas83763Daniel OliveiraAinda não há avaliações
- Desenvolvimento de uma empilhadeira robótica autônoma em miniatura para transporte industrialDocumento6 páginasDesenvolvimento de uma empilhadeira robótica autônoma em miniatura para transporte industrialDaniel OliveiraAinda não há avaliações
- Manual - TCCDocumento10 páginasManual - TCCDaniel OliveiraAinda não há avaliações
- Lista Aguardando Castracao em 01 de JunhoDocumento95 páginasLista Aguardando Castracao em 01 de JunhoDaniel OliveiraAinda não há avaliações
- Aula 2 EMI Logica de Programacao JNDDocumento53 páginasAula 2 EMI Logica de Programacao JNDDaniel OliveiraAinda não há avaliações
- Aula 1 Introdução CASDocumento44 páginasAula 1 Introdução CASDaniel OliveiraAinda não há avaliações
- Atividade CLP 1Documento10 páginasAtividade CLP 1Daniel OliveiraAinda não há avaliações
- Texto - O Papel Da Didática Na Formação Do EducacorDocumento6 páginasTexto - O Papel Da Didática Na Formação Do EducacorPriscila Carvalho0% (1)
- Fispq-Veja Perfumes 09-08-2022Documento13 páginasFispq-Veja Perfumes 09-08-2022Paula LopesAinda não há avaliações
- Aee Atividade de 23 de Agosto A 03 de Setembro - Aluno 08Documento3 páginasAee Atividade de 23 de Agosto A 03 de Setembro - Aluno 08Claudia Gomes DuarteAinda não há avaliações
- Processo Seletivo para Cursos de Aprendizagem IndustrialDocumento24 páginasProcesso Seletivo para Cursos de Aprendizagem IndustrialMatheus LealAinda não há avaliações
- Estudo Dirigido Membrana e Transporte A DistânciaDocumento2 páginasEstudo Dirigido Membrana e Transporte A DistânciaCleber VieiraAinda não há avaliações
- Relatório 03Documento6 páginasRelatório 03Caik CavalcanteAinda não há avaliações
- Circuitos pneumáticos industriaisDocumento8 páginasCircuitos pneumáticos industriaisaida.unbAinda não há avaliações
- Curso 249987 Aula 02 9c6f SimplificadoDocumento73 páginasCurso 249987 Aula 02 9c6f SimplificadoRicardo RibeiroAinda não há avaliações
- RodaaaDocumento8 páginasRodaaaLatifo RodaAinda não há avaliações
- 3 - Geometria GibbsCAM PDFDocumento14 páginas3 - Geometria GibbsCAM PDFarmindo maduroAinda não há avaliações
- B WF0 ZXJP YWwtby 1 y ZXBLCN RVCMLV LXNV Y2 LV Y3 VSD HVy YWwtbm Etcm VK YWNhbz Ex MDUy MDIy VDIw MTYDocumento9 páginasB WF0 ZXJP YWwtby 1 y ZXBLCN RVCMLV LXNV Y2 LV Y3 VSD HVy YWwtbm Etcm VK YWNhbz Ex MDUy MDIy VDIw MTYMaria Rita Alves BezerraAinda não há avaliações
- Responsabilidade ambiental uma obrigação moralDocumento3 páginasResponsabilidade ambiental uma obrigação moralMaria JoãoAinda não há avaliações
- Regulamento interno condomínioDocumento27 páginasRegulamento interno condomínioHRTECH SoluçõesAinda não há avaliações
- Credenciamento de empresas de mergulho no Porto de SantosDocumento7 páginasCredenciamento de empresas de mergulho no Porto de SantosVanessa ThomazAinda não há avaliações
- BG 116 23jun2022Documento110 páginasBG 116 23jun2022ALESSANDRO JUSTINO BRANCO SANTANAAinda não há avaliações
- EletromagnetismoDocumento12 páginasEletromagnetismoMariana Dolores de OliveiraAinda não há avaliações
- Mediação como compartilhamentoDocumento3 páginasMediação como compartilhamentoRobertaBrowneAinda não há avaliações
- Ossos gerais e esqueletoDocumento13 páginasOssos gerais e esqueletoInês PôlaAinda não há avaliações
- ORTOGRAFIADocumento15 páginasORTOGRAFIAnair sauaiaAinda não há avaliações
- Trilhas de Aprendizagem 4º e 5º Ano Ensino FundamentalDocumento14 páginasTrilhas de Aprendizagem 4º e 5º Ano Ensino FundamentalOscarina de Castro Silva FonteneleAinda não há avaliações
- A influência dos recursos hídricos na segurança nacional do BrasilDocumento10 páginasA influência dos recursos hídricos na segurança nacional do BrasilJonathan Ferreira BastosAinda não há avaliações
- Perfil Hematologico de Psitacideos ExóticosDocumento10 páginasPerfil Hematologico de Psitacideos ExóticosCarlos Diego Sousa RibeiroAinda não há avaliações
- Transformação Linear - Exercício ResolvidoDocumento1 páginaTransformação Linear - Exercício ResolvidoTiago PimentaAinda não há avaliações
- Psicanálise OrganizacionalDocumento3 páginasPsicanálise OrganizacionalLunamar Isabel Dente100% (1)
- Promovendo a igualdade racial na escolaDocumento58 páginasPromovendo a igualdade racial na escolaThiagoJSilvaAinda não há avaliações
- 003 12-Rules-to-Learn-to-Code-eBook-Copyright-App-Brewery - En.ptDocumento35 páginas003 12-Rules-to-Learn-to-Code-eBook-Copyright-App-Brewery - En.ptFrederico MacauAinda não há avaliações
- SISTEMAS Slides Parte01Documento84 páginasSISTEMAS Slides Parte01Ana BeatrizAinda não há avaliações