Você também pode gostar
- Diagnóstico e Soluções de Problemas Do Simatic S7-1200Documento33 páginasDiagnóstico e Soluções de Problemas Do Simatic S7-1200Leo Cruz100% (1)
- Programação 'Startup' em Linguagem de Alto Nível Com S7-SCL e SIMATIC S7-1200Documento30 páginasProgramação 'Startup' em Linguagem de Alto Nível Com S7-SCL e SIMATIC S7-1200Leo Cruz100% (2)
- Processamento de Valores Analógicos No SIMATIC S7-1200Documento34 páginasProcessamento de Valores Analógicos No SIMATIC S7-1200Leo CruzAinda não há avaliações
- SCE PT 010-010 R1209 Startup S7-1200Documento63 páginasSCE PT 010-010 R1209 Startup S7-1200Fernando PazzottiAinda não há avaliações
- Tipos de Bloco No SIMATIC S7-1200Documento40 páginasTipos de Bloco No SIMATIC S7-1200Leo Cruz100% (2)
- Sce 032 410 Basics Diagnostics s7 1500 r1703 PTDocumento40 páginasSce 032 410 Basics Diagnostics s7 1500 r1703 PTAndré FreireAinda não há avaliações
- Introdução A IHM TIA PortalDocumento64 páginasIntrodução A IHM TIA PortalLeo Cruz100% (3)
- Sce - PT - 092-300 Opc Ua S7-1500 - R1807Documento48 páginasSce - PT - 092-300 Opc Ua S7-1500 - R1807Leo CruzAinda não há avaliações
- Apostila Curso TIA PortalDocumento105 páginasApostila Curso TIA PortalAntonio75% (8)
- Implementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvNo EverandImplementando Um Inversor De Frequência Vetorial Programado No Arduino Com Driver Para Motor De Até 3 CvAinda não há avaliações
- Comunicação Ethernet s71200 s7300 Tia Portal1Documento10 páginasComunicação Ethernet s71200 s7300 Tia Portal1Leo CruzAinda não há avaliações
- STEP7 (TIA Portal) Upload S7-300 - 400Documento5 páginasSTEP7 (TIA Portal) Upload S7-300 - 400Leo CruzAinda não há avaliações
- Configurar Rede Industrial Ethernet Entre CLP S7-1200 e S7 1200Documento13 páginasConfigurar Rede Industrial Ethernet Entre CLP S7-1200 e S7 1200Leo Cruz100% (5)
- Curso Profibus Siemens PDFDocumento44 páginasCurso Profibus Siemens PDFrodrigomessiasAinda não há avaliações
- Configuração inicial do TIA PortalDocumento51 páginasConfiguração inicial do TIA PortalDiogo Coelho100% (5)
- Curso Profibus SiemensDocumento44 páginasCurso Profibus SiemensMarcelo Dias Bezerra57% (7)
- Apostila Step 7Documento295 páginasApostila Step 7carlos.globoAinda não há avaliações
- Apostila Step 7 1200Documento289 páginasApostila Step 7 1200Wanderley Terci Esteves100% (2)
- Editar Receitas para SeleçãoDocumento3 páginasEditar Receitas para SeleçãoJulianodeLimaAinda não há avaliações
- Rede As-I TIA PortalDocumento11 páginasRede As-I TIA PortalrafaelverdeliAinda não há avaliações
- S7 AvançadoDocumento372 páginasS7 AvançadoIvanir Ferreira da SilvaAinda não há avaliações
- Programação CLP S7 - 300Documento140 páginasProgramação CLP S7 - 300João CarlosAinda não há avaliações
- Manual S7 1200Documento53 páginasManual S7 1200Rafael LagaresAinda não há avaliações
- Controlador Lógico ProgramávelDocumento73 páginasControlador Lógico ProgramávelNoadia Gomes100% (2)
- Apostila TIA V11 r1 AvancadoDocumento112 páginasApostila TIA V11 r1 AvancadoSamuel Wolf Althaus100% (1)
- SITRAIN 2011 2012 PTDocumento44 páginasSITRAIN 2011 2012 PTFrancisco Miguel Pires CostaAinda não há avaliações
- Exercícios CLP TIA PortalDocumento58 páginasExercícios CLP TIA PortalCRISTIANO DO ESPIRITO SANTO0% (1)
- Atualização de Firmware S7-1200Documento27 páginasAtualização de Firmware S7-1200Leo CruzAinda não há avaliações
- Compatibilidade CPU S7-1200 V3 e V4Documento18 páginasCompatibilidade CPU S7-1200 V3 e V4Leo CruzAinda não há avaliações
- CLX RSLogix 5000, Iniciação PDFDocumento67 páginasCLX RSLogix 5000, Iniciação PDFHugo ValquaresmaAinda não há avaliações
- 04 - Tia Portal - Hands On - SCL v11 - v1Documento23 páginas04 - Tia Portal - Hands On - SCL v11 - v1Josemar Correia100% (1)
- S7-1200 - Conversao de EscalasDocumento5 páginasS7-1200 - Conversao de EscalasLeo Cruz100% (1)
- Curso de Programação de CLP, IHM e Supervisório SiemensDocumento67 páginasCurso de Programação de CLP, IHM e Supervisório Siemensandregroth100% (9)
- Tia 1500 BasicoDocumento316 páginasTia 1500 BasicoLeandro SilvaAinda não há avaliações
- Curso Redes Industriais DeviceNetDocumento40 páginasCurso Redes Industriais DeviceNetJúlio César Ramos100% (1)
- CLP Apostila GE Fanuc v1.3Documento117 páginasCLP Apostila GE Fanuc v1.3Darlan Leite64% (14)
- Configurar Rede Industrial Profinet Entre 2 Clps s7 - 1200Documento13 páginasConfigurar Rede Industrial Profinet Entre 2 Clps s7 - 1200phelipe_eletro100% (1)
- WinCC Conteúdo VersaobetaDocumento29 páginasWinCC Conteúdo Versaobetamansni100% (1)
- Rede Profibus DP Com Mestre Siemens Remota Serie Ponto NAP050Documento22 páginasRede Profibus DP Com Mestre Siemens Remota Serie Ponto NAP050Luciano SantosAinda não há avaliações
- Apostila - S7 1200 - Treinar ServiçosDocumento269 páginasApostila - S7 1200 - Treinar ServiçosBira Santana100% (3)
- Treinamento TIA Portal V11Documento137 páginasTreinamento TIA Portal V11Arthur Becker100% (9)
- Wincc ComfortDocumento120 páginasWincc ComfortAlessandro HenriqueAinda não há avaliações
- Configurar Rede Industrial Profibus Entre CLP S7-1200 e s7-300 - TIA PORTAL1Documento7 páginasConfigurar Rede Industrial Profibus Entre CLP S7-1200 e s7-300 - TIA PORTAL1Leo Cruz100% (1)
- Redes industriais TIA PortalDocumento144 páginasRedes industriais TIA PortalLMS Automation 4.0100% (2)
- Apostila Factory Talk View 2Documento131 páginasApostila Factory Talk View 2011078100% (2)
- Aplicação fuzzy x pid: técnicas de controle em ambientes simuladosNo EverandAplicação fuzzy x pid: técnicas de controle em ambientes simuladosAinda não há avaliações
- Introdução às linguagens de programação para CLPNo EverandIntrodução às linguagens de programação para CLPAinda não há avaliações
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte INo EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte IAinda não há avaliações
- Projetos De Instrumentação Eletrônica Usando O ArduinoNo EverandProjetos De Instrumentação Eletrônica Usando O ArduinoAinda não há avaliações
- SCE PT 010-010 R1209 Startup S7-1200 PDFDocumento63 páginasSCE PT 010-010 R1209 Startup S7-1200 PDFMarceloDellAinda não há avaliações
- SCE - PT - 031-300 IEC-Times and Counters S7-1200 - R1709Documento33 páginasSCE - PT - 031-300 IEC-Times and Counters S7-1200 - R1709Alexsandro OrchulhakAinda não há avaliações
- SCE - PT - 032-300 IEC-Timers and Counters - S7-1500 - R1703Documento29 páginasSCE - PT - 032-300 IEC-Timers and Counters - S7-1500 - R1703AgnaldoAinda não há avaliações
- Sce 011 102 Hardware Configuration s7 1200 Cpu1215c r1807 PTDocumento54 páginasSce 011 102 Hardware Configuration s7 1200 Cpu1215c r1807 PTWil WiltmarAinda não há avaliações
- Sce 032 500 Analog Values s7 1500 r1703 PTDocumento39 páginasSce 032 500 Analog Values s7 1500 r1703 PTRichard PolitoriAinda não há avaliações
- Documentação de Treinamento SCE: Módulo TIA Portal 012-101Documento65 páginasDocumentação de Treinamento SCE: Módulo TIA Portal 012-101José RicardoAinda não há avaliações
- SCE - PT - 012-201 Decentral Hardware Configuration S7-1500 ET200SP PN - R1703Documento81 páginasSCE - PT - 012-201 Decentral Hardware Configuration S7-1500 ET200SP PN - R1703RafaelAinda não há avaliações
- Ícones de Diagnósticos TIA Portal v14Documento3 páginasÍcones de Diagnósticos TIA Portal v14Leo CruzAinda não há avaliações
- Sce - PT - 092-300 Opc Ua S7-1500 - R1807Documento48 páginasSce - PT - 092-300 Opc Ua S7-1500 - R1807Leo CruzAinda não há avaliações
- TIA V15.1 Resumo de InovaçõesDocumento23 páginasTIA V15.1 Resumo de InovaçõesLeo Cruz100% (1)
- Sce - PT - 092-300 Opc Ua S7-1500 - R1807Documento48 páginasSce - PT - 092-300 Opc Ua S7-1500 - R1807Leo CruzAinda não há avaliações
- TIA V15.1 Requisitos para InstalaçãoDocumento17 páginasTIA V15.1 Requisitos para InstalaçãoLeo Cruz100% (1)
- SCE PT 031-410 Basics Diagnostics S7-1200 R1504Documento35 páginasSCE PT 031-410 Basics Diagnostics S7-1200 R1504Leo CruzAinda não há avaliações
- Requisitos para Instalação TIA Portal V15Documento11 páginasRequisitos para Instalação TIA Portal V15Leo CruzAinda não há avaliações
- Proteção de Código Fonte para o SIMATIC S7-1200 TIA PortalDocumento9 páginasProteção de Código Fonte para o SIMATIC S7-1200 TIA PortalLeo CruzAinda não há avaliações
- TIA V14 - Links Básicos PDFDocumento25 páginasTIA V14 - Links Básicos PDFLeo CruzAinda não há avaliações
- Ajuste Temporizador IHMDocumento3 páginasAjuste Temporizador IHMLeo CruzAinda não há avaliações
- SCE - PT - 012-100 Unspecific Hardware Configuration S7-1500 - R1512Documento53 páginasSCE - PT - 012-100 Unspecific Hardware Configuration S7-1500 - R1512Leo CruzAinda não há avaliações
- SCE - PT - 011-100 Unspecific Hardware Configuration S7-1200 - R1504Documento42 páginasSCE - PT - 011-100 Unspecific Hardware Configuration S7-1200 - R1504Leo CruzAinda não há avaliações
- Configuração e Testes de Comunicação Via Interface OPCDocumento22 páginasConfiguração e Testes de Comunicação Via Interface OPCLeo CruzAinda não há avaliações
- S7-300 - Conversao INT para S5TimeDocumento3 páginasS7-300 - Conversao INT para S5TimeLeo Cruz0% (1)
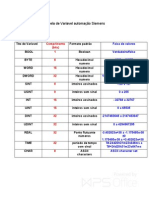
- Tabela de Variáveis SiemensDocumento1 páginaTabela de Variáveis SiemensLeo Cruz100% (1)
- SINAMICS MDI posicionamento guiaDocumento7 páginasSINAMICS MDI posicionamento guiajeanfmirandaAinda não há avaliações
- Report WinCC ProfessionalDocumento10 páginasReport WinCC ProfessionalLeo CruzAinda não há avaliações
- Configuração de Alarmes de Usuários e Operator Input Log. WinCC ProfessionalDocumento6 páginasConfiguração de Alarmes de Usuários e Operator Input Log. WinCC ProfessionalLeo Cruz100% (1)
- WinCC Professional PLC Code DisplayDocumento16 páginasWinCC Professional PLC Code DisplayLeo CruzAinda não há avaliações
- Uso de Janelas de Controle Na IHM (TIA Portal)Documento11 páginasUso de Janelas de Controle Na IHM (TIA Portal)Leo Cruz100% (1)
- Tentativas Invalidas de Login HMIDocumento3 páginasTentativas Invalidas de Login HMILeo CruzAinda não há avaliações
- Comunicação Com o 2x SIMATIC S7-1200Documento39 páginasComunicação Com o 2x SIMATIC S7-1200Leo Cruz100% (1)
- Introdução A IHM TIA PortalDocumento64 páginasIntrodução A IHM TIA PortalLeo Cruz100% (3)
- Temporizadores IEC e Contadores IEC Do S7-1200 TIA PortalDocumento54 páginasTemporizadores IEC e Contadores IEC Do S7-1200 TIA PortalLeo CruzAinda não há avaliações
- SCE PT 010 010 R1209 Programacao Startup Com SIMATIC S7 1200Documento63 páginasSCE PT 010 010 R1209 Programacao Startup Com SIMATIC S7 1200Sanderley Ribeiro de AlmeidaAinda não há avaliações
- Suvinil Látex Maxx Branco NeveDocumento9 páginasSuvinil Látex Maxx Branco NevethiagoAinda não há avaliações
- Lista 2Documento3 páginasLista 2pedro gonçalvesAinda não há avaliações
- Prova Números InteirosDocumento72 páginasProva Números InteirosJoana de CastroAinda não há avaliações
- Videojet Ink: Ficha de Informações de Segurança de Produtos QuímicosDocumento10 páginasVideojet Ink: Ficha de Informações de Segurança de Produtos Químicosanselmo sanchezAinda não há avaliações
- Lista 9Documento2 páginasLista 9jake poppeAinda não há avaliações
- Higiene Do TrabalhoDocumento26 páginasHigiene Do TrabalhoRuiMãodeFerroAinda não há avaliações
- Medidas de pH em águasDocumento13 páginasMedidas de pH em águasJamile De Souza Silva100% (1)
- Manual Sihi Lem 26-51-126 - PortDocumento51 páginasManual Sihi Lem 26-51-126 - PortWILSON MENDONÇAAinda não há avaliações
- CalometriaDocumento4 páginasCalometriaYasmim CostaAinda não há avaliações
- Manual de Boas PraticasDocumento12 páginasManual de Boas PraticasHans WandebergAinda não há avaliações
- Física 10o ano – Exercícios de Física de Exames e TestesDocumento6 páginasFísica 10o ano – Exercícios de Física de Exames e TestesRaquel_DanielaAinda não há avaliações
- Estabilidade medicamentosDocumento40 páginasEstabilidade medicamentosSidnei J Costa100% (1)
- MT - Digital - Ko25 - Ko15 - 20 - 35priime - 140119Documento44 páginasMT - Digital - Ko25 - Ko15 - 20 - 35priime - 140119Fabio DaronAinda não há avaliações
- Formulário Aprov Assistência Técnica - Anexos I A III (Pronto)Documento5 páginasFormulário Aprov Assistência Técnica - Anexos I A III (Pronto)Brenno CorrêaAinda não há avaliações
- Apresentação Câmara FriaDocumento36 páginasApresentação Câmara FriaflavialaminAinda não há avaliações
- Manual Elgin InstalacaoDocumento34 páginasManual Elgin InstalacaoJose Ignacio SalamancaAinda não há avaliações
- Check List - ANVISA RDC 216Documento5 páginasCheck List - ANVISA RDC 216pabline gerardi miguel100% (1)
- FuncDocumento64 páginasFuncedibenfica4879Ainda não há avaliações
- Esquema 1938 SDocumento149 páginasEsquema 1938 SSamit Jorge100% (1)
- Condução de Calor em Regime EstacionárioDocumento21 páginasCondução de Calor em Regime EstacionárioFelipe Gabriel DadamAinda não há avaliações
- Avi Fetrans CompletaDocumento5 páginasAvi Fetrans CompletaROGER PINHOAinda não há avaliações
- Prova 2016Documento10 páginasProva 2016Adilson Santos100% (1)
- Ex Motor Manual PT Rev D Web PDFDocumento32 páginasEx Motor Manual PT Rev D Web PDFsinaldocorvoAinda não há avaliações
- Primeira Lista de Exercícios de Cálculo IIDocumento4 páginasPrimeira Lista de Exercícios de Cálculo IIJosé Henrique de Mattos DraegerAinda não há avaliações
- Sostag - Lista 03 Vesp e Not - PRONTADocumento4 páginasSostag - Lista 03 Vesp e Not - PRONTAPedro MateusAinda não há avaliações
- NBR IEC 60079-10-2Documento34 páginasNBR IEC 60079-10-2Lugo EngenhariaAinda não há avaliações
- Instruções Calandra HM 5316Documento20 páginasInstruções Calandra HM 5316David MieiroAinda não há avaliações
- Tiristores na indústria: aplicações e tiposDocumento5 páginasTiristores na indústria: aplicações e tiposGera BarbosaAinda não há avaliações
- 928-Texto Do Artigo-3727-1-10-20200211Documento19 páginas928-Texto Do Artigo-3727-1-10-20200211Talita Fernandes FerreiraAinda não há avaliações
- Capítulo 2Documento6 páginasCapítulo 2LucieleDeHolandaAinda não há avaliações