Você também pode gostar
- Guia Curso de Desenho Cartoon Cenários PDFDocumento98 páginasGuia Curso de Desenho Cartoon Cenários PDFEvander Mendonça100% (8)
- Padroes de CandlesDocumento2 páginasPadroes de CandlesNor Gawas67% (3)
- Manual de Producao AudiovisualDocumento35 páginasManual de Producao AudiovisualMonique EvelleAinda não há avaliações
- Manual de Produção AudiovisualDocumento32 páginasManual de Produção AudiovisualCarolinaradjesAinda não há avaliações
- Preparação Do Design Gráfico para Mídia ImpressaDocumento63 páginasPreparação Do Design Gráfico para Mídia ImpressaLuiz Seman100% (1)
- Caligrafia JacksonAlves PDFDocumento10 páginasCaligrafia JacksonAlves PDFDorcasAinda não há avaliações
- Caligrafia JacksonAlves PDFDocumento10 páginasCaligrafia JacksonAlves PDFAlexsander Alves Teixeira100% (3)
- O Roteiro Nas Histórias em Quadrinhos LivroDocumento104 páginasO Roteiro Nas Histórias em Quadrinhos LivroEdmar Neves100% (1)
- Como Transformar Uma Ideia em RoteiroDocumento61 páginasComo Transformar Uma Ideia em RoteirosrsandroromeroAinda não há avaliações
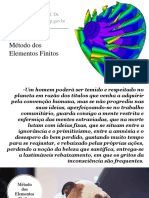
- Slide 1 - Aula de Elementos FinitosDocumento21 páginasSlide 1 - Aula de Elementos FinitosluisAinda não há avaliações
- Lista 3 ProvaDocumento7 páginasLista 3 ProvaWilson100% (1)
- Livro Movimento Parado Passo A PassoDocumento82 páginasLivro Movimento Parado Passo A PassoPaulo domingosAinda não há avaliações
- SPF Cenário 01-00Documento31 páginasSPF Cenário 01-00Vinicius VenezaAinda não há avaliações
- Cap 2 - Captacao e Aducao PDFDocumento55 páginasCap 2 - Captacao e Aducao PDFEduardo WolffAinda não há avaliações
- MTD20 KW AluminioDocumento23 páginasMTD20 KW AluminioRonny A. Chavez100% (2)
- Mini-Oficina de Quadrinhos Digitais - Versão 001Documento85 páginasMini-Oficina de Quadrinhos Digitais - Versão 001Luís Carlos SousaAinda não há avaliações
- EletrodinamicaDocumento6 páginasEletrodinamicaPaulo Faustini JrAinda não há avaliações
- TCC - Luis Tischer 2015Documento76 páginasTCC - Luis Tischer 2015Matheus SalesAinda não há avaliações
- Chrono Trigger PDFDocumento2 páginasChrono Trigger PDFChristian Mendes de OliveiraAinda não há avaliações
- Apostila InkscapeDocumento34 páginasApostila Inkscapefilipef9Ainda não há avaliações
- Trabalho de Pesquisa COLEGAS 2Documento15 páginasTrabalho de Pesquisa COLEGAS 2paulo cotaAinda não há avaliações
- Manual Guardian r290Documento2 páginasManual Guardian r290inkifireAinda não há avaliações
- Comandos Photoshop CS 5Documento9 páginasComandos Photoshop CS 5Wellington Pires da SilvaAinda não há avaliações
- Trabalho de Pesquisa COLEGASDocumento12 páginasTrabalho de Pesquisa COLEGASpaulo cotaAinda não há avaliações
- FlatPen Amostra GratisDocumento5 páginasFlatPen Amostra GratisJullian Corzario100% (1)
- Linguagem CinemaDocumento46 páginasLinguagem CinemaRafaela GomesAinda não há avaliações
- Desenho Assistido Por Computador - SketchupDocumento40 páginasDesenho Assistido Por Computador - Sketchupfidows70Ainda não há avaliações
- Aula de Artes - Professor Douglas - Luz e SombraDocumento45 páginasAula de Artes - Professor Douglas - Luz e SombraJandersonRodrigues100% (1)
- Apostila Free - Jackson AlvesDocumento11 páginasApostila Free - Jackson AlvesMarcus MatsuyamaAinda não há avaliações
- Confraria de Arton - Ficha Oficial de Pathfinder 2E e Aventura GrátisDocumento13 páginasConfraria de Arton - Ficha Oficial de Pathfinder 2E e Aventura GrátisArthur PinheiroAinda não há avaliações
- Apostila Sobre A HP-12CDocumento16 páginasApostila Sobre A HP-12Ccesarcosta_opetAinda não há avaliações
- Toaz - Info Manual Da Frontura Maquina de Trico Elgim Brother 840 PRDocumento50 páginasToaz - Info Manual Da Frontura Maquina de Trico Elgim Brother 840 PRNecielíAinda não há avaliações
- Dicionário Ilustrado PDFDocumento19 páginasDicionário Ilustrado PDFConstantino O SabinomanAinda não há avaliações
- Catálogo Estampos TRES SDocumento43 páginasCatálogo Estampos TRES SIRINEU MAURICIO DE LIMA ALVESAinda não há avaliações
- Catalogo Comercial de Bases de EstampoDocumento44 páginasCatalogo Comercial de Bases de EstampoRodrigoDoNascimentoBuenoAinda não há avaliações
- Receita Sousplat Juta Euroroma Zaide Grafico Ecologico SustentavelDocumento1 páginaReceita Sousplat Juta Euroroma Zaide Grafico Ecologico SustentavelNana CortialAinda não há avaliações
- Griffu - 1997 - Tralhas VariasDocumento1 páginaGriffu - 1997 - Tralhas VariasAndré BrandãoAinda não há avaliações
- CheatSheet - ScrivenerDocumento5 páginasCheatSheet - ScrivenerLuiz Filipe AraújoAinda não há avaliações
- Dokumen - Tips - Livro Preparacao Do Design Grafico para Impressao OfflineoffsetDocumento12 páginasDokumen - Tips - Livro Preparacao Do Design Grafico para Impressao OfflineoffsetFabiana AbgussenAinda não há avaliações
- Tribuna Quark N.40 - 2019-09Documento28 páginasTribuna Quark N.40 - 2019-09Mel PolidoriAinda não há avaliações
- Degustação PPR Digital As Ferramentas Do Módulo Parcialcad - Tradução Por Renata BlumerDocumento31 páginasDegustação PPR Digital As Ferramentas Do Módulo Parcialcad - Tradução Por Renata BlumerJuan Antonio Hernández CitalAinda não há avaliações
- A Arte Da AnimaçãoDocumento24 páginasA Arte Da AnimaçãoGabriel RelichAinda não há avaliações
- Tga Rotogravura PDFDocumento64 páginasTga Rotogravura PDFCesar Augusto Marques FilhoAinda não há avaliações
- 04 Planos DecupagemDocumento27 páginas04 Planos DecupagemguilhermewrAinda não há avaliações
- Passo A Passo SublimaçãoDocumento8 páginasPasso A Passo SublimaçãoRene AbdulAinda não há avaliações
- Catalogo Brindes Paraná 2023Documento35 páginasCatalogo Brindes Paraná 2023Paullo VicttorAinda não há avaliações
- Aula 01 - Materiais de Desenho TcnicoDocumento20 páginasAula 01 - Materiais de Desenho TcnicoCaio Fernando LiraAinda não há avaliações
- Apostila MataleoneDocumento59 páginasApostila Mataleonealvaro assuncaoAinda não há avaliações
- UntitledDocumento6 páginasUntitledBianca ChavesAinda não há avaliações
- Beer Cap 1 Ex 6Documento2 páginasBeer Cap 1 Ex 6André Luis Pissolatti100% (1)
- Avaliação Oficial I - AlgoritmosDocumento4 páginasAvaliação Oficial I - AlgoritmosKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Criterios Dimensionamento de Condutores 23Documento9 páginasCriterios Dimensionamento de Condutores 23Klew Cleudiney Theodoro BrandãoAinda não há avaliações
- Formulário RMA Pichau 2023Documento1 páginaFormulário RMA Pichau 2023Klew Cleudiney Theodoro Brandão0% (1)
- Orientação AplicaçãoDocumento2 páginasOrientação AplicaçãoKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Montagem e ManutençãoDocumento6 páginasMontagem e ManutençãoKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- MODELO PROVA HardwareDocumento5 páginasMODELO PROVA HardwareKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- HardwareDocumento3 páginasHardwareKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Tenha Uma Fonte Ajustável para A Sua Bancada Com o Módulo Regulador de Tensão LM317 - Arduino e CIADocumento2 páginasTenha Uma Fonte Ajustável para A Sua Bancada Com o Módulo Regulador de Tensão LM317 - Arduino e CIAKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Hardware 0 A12Documento155 páginasHardware 0 A12Klew Cleudiney Theodoro BrandãoAinda não há avaliações
- Modelo ProvaDocumento126 páginasModelo ProvaKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Como Usar Um Smartphone Antigo Ou Tablet Como Uma Câmera de SegurançaDocumento3 páginasComo Usar Um Smartphone Antigo Ou Tablet Como Uma Câmera de SegurançaKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Real Time Clock (RTC) DS1307 - Arduino e CIADocumento3 páginasReal Time Clock (RTC) DS1307 - Arduino e CIAKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Como Usar Um Smartphone Antigo Ou Tablet Como Uma Câmera de SegurançaDocumento11 páginasComo Usar Um Smartphone Antigo Ou Tablet Como Uma Câmera de SegurançaKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Eletrônica - Mouse PS2 e Projetos Arduino OtimouseDocumento3 páginasEletrônica - Mouse PS2 e Projetos Arduino OtimouseKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- NewTone - Alternativa À Biblioteca Tone Do Arduino - Arduino e CIADocumento2 páginasNewTone - Alternativa À Biblioteca Tone Do Arduino - Arduino e CIAKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- Como Usar o Adaptador USB para ESP8266 ESP-01 - Arduino e CIADocumento5 páginasComo Usar o Adaptador USB para ESP8266 ESP-01 - Arduino e CIAKlew Cleudiney Theodoro Brandão100% (1)
- Programação Arduino para Iniciantes - o Controlador de Semáforo PDFDocumento10 páginasProgramação Arduino para Iniciantes - o Controlador de Semáforo PDFKlew Cleudiney Theodoro BrandãoAinda não há avaliações
- MessageDocumento13 páginasMessageGuilherme GmAinda não há avaliações
- Minicurso - Formulações de Compostos de Borracha - Elastomeros FlexsysDocumento140 páginasMinicurso - Formulações de Compostos de Borracha - Elastomeros FlexsysGilson VieiraAinda não há avaliações
- Exercícios de Hidro e TermoDocumento6 páginasExercícios de Hidro e TermoFlávio Roberto Borges LimaAinda não há avaliações
- Guia de Horarios-Uni-Fim PDFDocumento2 páginasGuia de Horarios-Uni-Fim PDFAnonymous e5eAbnUlwJAinda não há avaliações
- Invenção Das Tradições PDFDocumento6 páginasInvenção Das Tradições PDFMaurício de TeixeiraAinda não há avaliações
- Sinalização Intercelular e Mecanismos Transdução Sinal I PDFDocumento27 páginasSinalização Intercelular e Mecanismos Transdução Sinal I PDFCarina Barbosa100% (1)
- Hermes Desvelado Por Rubellus PetrinusDocumento4 páginasHermes Desvelado Por Rubellus PetrinusRicardo Antunes100% (1)
- Clube de Desbravadores - AreiasDocumento3 páginasClube de Desbravadores - AreiasCleo Roger Heck100% (1)
- Teste de FormaçãoDocumento13 páginasTeste de FormaçãoElrohirPendragonAinda não há avaliações
- Normas para TubosDocumento6 páginasNormas para TubosLeandro VilalvaAinda não há avaliações
- Comgas A-041.01-09 - Tubos de Polietileno PE80 - LL4 para Redes de Gás NaturalDocumento15 páginasComgas A-041.01-09 - Tubos de Polietileno PE80 - LL4 para Redes de Gás NaturalUgoRibeiroAinda não há avaliações
- Amostragem GeorreferenciadaDocumento5 páginasAmostragem GeorreferenciadaGustavoHenriqueAinda não há avaliações
- Apostila de Quimica Analitica QualitativaDocumento83 páginasApostila de Quimica Analitica Qualitativasebianco0% (1)
- ABNT - DETERMINAÇÃO DE Estanho PDFDocumento2 páginasABNT - DETERMINAÇÃO DE Estanho PDFAlexandre PetolchcknyAinda não há avaliações
- Catalogo-Pecas BaldanDocumento64 páginasCatalogo-Pecas Baldanemerson sousa santosAinda não há avaliações
- Satyamurty Rudimentos de Meteorologia DinamicaDocumento154 páginasSatyamurty Rudimentos de Meteorologia DinamicaJorge Yoshiro KimuraAinda não há avaliações
- Procedimento de Aplicacao - Elastomero A Frio - Revisao 6Documento17 páginasProcedimento de Aplicacao - Elastomero A Frio - Revisao 6Rodrigues SantosAinda não há avaliações
- Matematica BasicaDocumento43 páginasMatematica BasicaAngela HernandezAinda não há avaliações
- 3 Variaveis Agudas de Montagem de Programa de Treinamento de ForcaDocumento44 páginas3 Variaveis Agudas de Montagem de Programa de Treinamento de ForcaJean Freitas LimaAinda não há avaliações
- ROCKFIBRAS - CalhasDocumento3 páginasROCKFIBRAS - Calhasbrujula24Ainda não há avaliações
- Os Náufragos Do SeleneDocumento154 páginasOs Náufragos Do SeleneDedinho HaraAinda não há avaliações
- Protese TCCDocumento155 páginasProtese TCCIlgner Aparecido BecheleniAinda não há avaliações
- IEBTDocumento20 páginasIEBTJohn Nias OniasAinda não há avaliações