Você também pode gostar
- Feiticeiros e Maldições - Livro Básico v1.1Documento360 páginasFeiticeiros e Maldições - Livro Básico v1.1Matheus Martins BenettiAinda não há avaliações
- Introdução à Hidrologia AplicadaDocumento269 páginasIntrodução à Hidrologia AplicadaMICHERLANESIQUEIRAAinda não há avaliações
- Os valores humanos fundamentaisDocumento3 páginasOs valores humanos fundamentaisRoney Soares100% (1)
- Ficha de Avaliação - 3º Período - 3º Ano EM - IIDocumento8 páginasFicha de Avaliação - 3º Período - 3º Ano EM - IItulipa1977Ainda não há avaliações
- Geometria analítica - Lista de exercícios vetores no planoDocumento2 páginasGeometria analítica - Lista de exercícios vetores no planoEsteves SemetafísicaAinda não há avaliações
- vetores3Documento45 páginasvetores3Wanderson CândidoAinda não há avaliações
- Lista 02 - Álgebra VetorialDocumento4 páginasLista 02 - Álgebra VetorialMaria Eduarda EnriconiAinda não há avaliações
- Lista 3Documento2 páginasLista 3Joaog123Ainda não há avaliações
- Lista2 GADocumento7 páginasLista2 GAJonatas SouzaAinda não há avaliações
- MAT3457 – Álgebra Linear I - Lista de Exercícios 1o Semestre 2019Documento15 páginasMAT3457 – Álgebra Linear I - Lista de Exercícios 1o Semestre 2019VisitanteAinda não há avaliações
- Lista ProdvetDocumento5 páginasLista ProdvetEmilia Reynaud EmiAinda não há avaliações
- Provas de propriedades geométricas de vetores e figuras planasDocumento3 páginasProvas de propriedades geométricas de vetores e figuras planasJoelAinda não há avaliações
- Produto escalar e geometria vetorialDocumento4 páginasProduto escalar e geometria vetoriallaudellinoAinda não há avaliações
- Lista de exercícios de álgebra linear com soluçõesDocumento6 páginasLista de exercícios de álgebra linear com soluçõesventooesteAinda não há avaliações
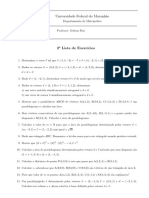
- 1 Lista Vetorial UFMADocumento2 páginas1 Lista Vetorial UFMAThomáz M.A.FAinda não há avaliações
- AGA Lista 04Documento2 páginasAGA Lista 04LuanAinda não há avaliações
- Aula 1 Vetores NoçãoDocumento3 páginasAula 1 Vetores NoçãoMarcos Freitas de MoraesAinda não há avaliações
- Lista04 MvgaDocumento4 páginasLista04 MvgaHenrique MedeirosAinda não há avaliações
- MAT105 - Geometria Analítica – Lista 1 de exercíciosDocumento3 páginasMAT105 - Geometria Analítica – Lista 1 de exercíciosVieira BrunoAinda não há avaliações
- UNIVERSIDADE FEDERAL DE SERGIPE: LISTA 1 - VETORES E GEOMETRIA ANALÍTICADocumento2 páginasUNIVERSIDADE FEDERAL DE SERGIPE: LISTA 1 - VETORES E GEOMETRIA ANALÍTICATheo MenezesAinda não há avaliações
- Conteúdo: Álgebra Dos Vetores No Espaço N-DimensionalDocumento10 páginasConteúdo: Álgebra Dos Vetores No Espaço N-DimensionalCauêt SilvaAinda não há avaliações
- Lista de Exercícios - Semana 02Documento3 páginasLista de Exercícios - Semana 02STEFANIO CARLOSAinda não há avaliações
- Lista 7 GaalDocumento4 páginasLista 7 GaalHoltzAinda não há avaliações
- Vetores no R2 e R3Documento22 páginasVetores no R2 e R3Célsio MuacandalaAinda não há avaliações
- Vetores em r2 e r3Documento19 páginasVetores em r2 e r3Francielly RodriguesAinda não há avaliações
- TerceiraListaDocumento5 páginasTerceiraListaChrisAssunAinda não há avaliações
- 2 Lista Vetorial UFMADocumento2 páginas2 Lista Vetorial UFMAThomáz M.A.FAinda não há avaliações
- Lista de exercícios de geometria analíticaDocumento5 páginasLista de exercícios de geometria analíticanano nanoAinda não há avaliações
- UFPR Centro Politécnico Disciplina Introdução Geometria Analítica Álgebra LinearDocumento5 páginasUFPR Centro Politécnico Disciplina Introdução Geometria Analítica Álgebra LinearHoltzAinda não há avaliações
- 05 - Conjunto Ortogonal de Vetores, Bases Ortogonais e OrtonormaisDocumento7 páginas05 - Conjunto Ortogonal de Vetores, Bases Ortogonais e OrtonormaisLeo MenezesAinda não há avaliações
- VetoresDocumento7 páginasVetoreseng.alinehennAinda não há avaliações
- Vetores Lista 1Documento25 páginasVetores Lista 1Daniel AraujoAinda não há avaliações
- Avaliação de Álgebra Vetorial e Geometria AnalíticaDocumento1 páginaAvaliação de Álgebra Vetorial e Geometria AnalíticaJosé Lima Silva JúniorAinda não há avaliações
- lista de exercícios geometria analítica e álgebra linearDocumento3 páginaslista de exercícios geometria analítica e álgebra linearCARLOS EDUARDO LOPES REIS DE CAMPOSAinda não há avaliações
- Lista 6Documento1 páginaLista 6Ranis JuniorAinda não há avaliações
- Lista de exercícios de álgebra linear e geometria analíticaDocumento15 páginasLista de exercícios de álgebra linear e geometria analíticammartinez2012Ainda não há avaliações
- Vetores No R 2 e R 3Documento108 páginasVetores No R 2 e R 3Vitor Gabriel moraesAinda não há avaliações
- Lista - Cal3Documento34 páginasLista - Cal3Anderson Corrêa PortoAinda não há avaliações
- Lista de Exercicios Vetores PDFDocumento2 páginasLista de Exercicios Vetores PDFElias MatemáticoAinda não há avaliações
- UFPR - Lista 8 de Introdução a Geometria Analítica e Álgebra LinearDocumento3 páginasUFPR - Lista 8 de Introdução a Geometria Analítica e Álgebra LinearHoltzAinda não há avaliações
- 03 - Plano - R3Documento13 páginas03 - Plano - R3poffo_edu6665Ainda não há avaliações
- Lista Avaliativa I - GADocumento2 páginasLista Avaliativa I - GAMicheliAinda não há avaliações
- Lista de Exercícios 2 - Vetores e Produto Vetorial-V2Documento1 páginaLista de Exercícios 2 - Vetores e Produto Vetorial-V2Eugenio Saverio Trazzi Bellini JrAinda não há avaliações
- Ficha Formativa Novembro 2017Documento4 páginasFicha Formativa Novembro 2017Mariana PortasAinda não há avaliações
- Um Curso de Calculo v2 - Lista 6.3 ResoluçãoDocumento4 páginasUm Curso de Calculo v2 - Lista 6.3 ResoluçãoSHAOLIN MATADOR DE PORCOAinda não há avaliações
- Aula 3 - Vetores em 2D e 3D (Modo de CompatibilidadeDocumento8 páginasAula 3 - Vetores em 2D e 3D (Modo de CompatibilidadeDanilo LoubachAinda não há avaliações
- (Algebra Linear) Vetores No Plano e No Espaço Parte 3Documento24 páginas(Algebra Linear) Vetores No Plano e No Espaço Parte 3Nickolas Cavalcanti100% (1)
- Lista 1 de CVDocumento5 páginasLista 1 de CVeduardomirandameiraAinda não há avaliações
- Exercciossobre Dependncia Lineare Produto EscalarDocumento5 páginasExercciossobre Dependncia Lineare Produto EscalarJOAO PEDRO SANTOS DE SOUSAAinda não há avaliações
- Lista 7Documento3 páginasLista 7asdfghjklAinda não há avaliações
- 1 Lista Exercicios EletroDocumento3 páginas1 Lista Exercicios EletroGeraldo PereiraAinda não há avaliações
- Equações do Plano em 3DDocumento15 páginasEquações do Plano em 3DDaniani GondimAinda não há avaliações
- Resoluçao de ExerciciosDocumento9 páginasResoluçao de ExerciciosFrank Jone JuniorAinda não há avaliações
- Lista - 01 de Álgebrar LinearDocumento2 páginasLista - 01 de Álgebrar LinearMarcos Gabriel Lima Dos SantosAinda não há avaliações
- Acfrogcroyn-9nkmh3qyax0k1kpkst8 Rl1boc0gzqxgceps0lzn194s3gdctrsppd 4xkeoy2r7napcuwilkgs5mplthbujk Aqpnk 6l3jvctxiepu5gmhpwhwu2gkygvnyg9wtldzq32pfpn8Documento12 páginasAcfrogcroyn-9nkmh3qyax0k1kpkst8 Rl1boc0gzqxgceps0lzn194s3gdctrsppd 4xkeoy2r7napcuwilkgs5mplthbujk Aqpnk 6l3jvctxiepu5gmhpwhwu2gkygvnyg9wtldzq32pfpn8guilherme.cantante.2Ainda não há avaliações
- Derivadas direcionais: vetor gradienteDocumento4 páginasDerivadas direcionais: vetor gradienteFrancielle CostaAinda não há avaliações
- Representação de vetores no R2 e R3Documento102 páginasRepresentação de vetores no R2 e R3RaumakAinda não há avaliações
- Algebra Linear - Álgebra Vetorial e Geometria em r2 e r3Documento6 páginasAlgebra Linear - Álgebra Vetorial e Geometria em r2 e r3Anna RodriguesAinda não há avaliações
- prod_vetDocumento9 páginasprod_vetDavidAinda não há avaliações
- AL 1 - O Espaço Euclidiano R NDocumento6 páginasAL 1 - O Espaço Euclidiano R NBruno dos SantosAinda não há avaliações
- Lista Mod 1 Lis 1 c3 02 2019Documento7 páginasLista Mod 1 Lis 1 c3 02 2019Matheus RodriguesAinda não há avaliações
- Aula 1 Vetores NoçãoDocumento3 páginasAula 1 Vetores NoçãoMarcos Freitas de MoraesAinda não há avaliações
- Vetores no R3: decomposição e propriedadesDocumento1 páginaVetores no R3: decomposição e propriedadesMarcos Freitas de MoraesAinda não há avaliações
- Geometria analítica retaDocumento2 páginasGeometria analítica retaMarcos Freitas de MoraesAinda não há avaliações
- Estudo Das Cônicas e QuádricasDocumento144 páginasEstudo Das Cônicas e QuádricasMarcos Freitas de MoraesAinda não há avaliações
- Produto escalar e vetorial de vetoresDocumento2 páginasProduto escalar e vetorial de vetoresMarcos Freitas de MoraesAinda não há avaliações
- Vetores: Noção, Propriedades e OperaçõesDocumento4 páginasVetores: Noção, Propriedades e OperaçõesMarcos Freitas de MoraesAinda não há avaliações
- Aula 10 - Cônicas e QuádricasDocumento3 páginasAula 10 - Cônicas e QuádricasMarcos Freitas de MoraesAinda não há avaliações
- Estudo Das Cônicas e QuádricasDocumento144 páginasEstudo Das Cônicas e QuádricasMarcos Freitas de MoraesAinda não há avaliações
- Hidrologia CompletoDocumento151 páginasHidrologia CompletoMarcos Freitas de MoraesAinda não há avaliações
- Aula 4 - LOB1233Documento25 páginasAula 4 - LOB1233Marcos Freitas de MoraesAinda não há avaliações
- Perfuratriz Hidráulica HB-17 até 9mDocumento1 páginaPerfuratriz Hidráulica HB-17 até 9mMaximiliano BettarelAinda não há avaliações
- Dispers Green LBDocumento1 páginaDispers Green LBKevin GonzalezAinda não há avaliações
- Aulas Particulares 08Documento2 páginasAulas Particulares 08thiago rebeloAinda não há avaliações
- Apresentação GenéticaDocumento30 páginasApresentação GenéticaIara FernandesAinda não há avaliações
- Manual 2710 PDocumento49 páginasManual 2710 PAlan FelipiAinda não há avaliações
- Currículo Danielli Dias Ribeiro Pereira - FisioterapiaDocumento2 páginasCurrículo Danielli Dias Ribeiro Pereira - FisioterapiaDanielli DiasAinda não há avaliações
- BJJ mente corpo almaDocumento6 páginasBJJ mente corpo almaDjalma HenaresAinda não há avaliações
- Alterações em editais de cursos de pós-graduação na ESP/CEDocumento44 páginasAlterações em editais de cursos de pós-graduação na ESP/CEGlauco BanhosAinda não há avaliações
- Introdução à construção de dashboards com ExcelDocumento30 páginasIntrodução à construção de dashboards com ExcelLivis The RabbitAinda não há avaliações
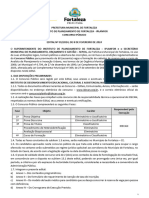
- Editaliplanfor 2024Documento60 páginasEditaliplanfor 2024Lania FreitasAinda não há avaliações
- Avaetê ArtigoDocumento11 páginasAvaetê ArtigoMarcos GMAinda não há avaliações
- Planejamento Do Maternal I - A (Férias)Documento10 páginasPlanejamento Do Maternal I - A (Férias)Luana Daniel da SilvaAinda não há avaliações
- Análise de Incertezas de Parâmetros em ACVed usando Simulação de Monte CarloDocumento163 páginasAnálise de Incertezas de Parâmetros em ACVed usando Simulação de Monte CarloTamires CordeiroAinda não há avaliações
- Meio AmbienteDocumento4 páginasMeio AmbienteSonaly SilveiraAinda não há avaliações
- Relatório Extensão - Docx ModeloDocumento32 páginasRelatório Extensão - Docx ModeloGleicy FavachoAinda não há avaliações
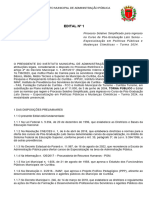
- EDITAL 1_2024 publicado no DOMDocumento18 páginasEDITAL 1_2024 publicado no DOMrogonsalvesAinda não há avaliações
- Acumuladores hidráulicosDocumento2 páginasAcumuladores hidráulicosMaurício MarianoAinda não há avaliações
- Relatório UsinagemDocumento12 páginasRelatório UsinagemIsabela RodriguesAinda não há avaliações
- 12ano F 2 1 3 Campo GraviticoDocumento18 páginas12ano F 2 1 3 Campo GraviticoGiovani CortezAinda não há avaliações
- Manual Completo - PolospackDocumento46 páginasManual Completo - Polospackigor suzatoAinda não há avaliações
- Guitar Hacks - Abril 2019Documento30 páginasGuitar Hacks - Abril 2019Yuri Santos PassosAinda não há avaliações
- Utilização Do Resíduo Proveniente Do Desdobramento de Rochas Ornamentais Na ConfecçãoDocumento5 páginasUtilização Do Resíduo Proveniente Do Desdobramento de Rochas Ornamentais Na Confecçãointelligenic torricelliAinda não há avaliações
- Introdução e Conceitos GRMP AtualizadoDocumento18 páginasIntrodução e Conceitos GRMP AtualizadoFabrício AlvesAinda não há avaliações
- Relatorio 2 Fisica ExpDocumento11 páginasRelatorio 2 Fisica ExpClarissa CardosoAinda não há avaliações
- Sobrepressão para Dimensionamento de Válvula de Alívio PDFDocumento4 páginasSobrepressão para Dimensionamento de Válvula de Alívio PDFClerder CardosoAinda não há avaliações
- Gabarito Do Estagio F de Matematica Do KumongolkesDocumento2 páginasGabarito Do Estagio F de Matematica Do Kumongolkestahtainara308Ainda não há avaliações
- O Que É IMC PercentilDocumento4 páginasO Que É IMC PercentilMaria Araujo BarbosaAinda não há avaliações