Você também pode gostar
- Técnicas Vocais para Terapia de VozDocumento14 páginasTécnicas Vocais para Terapia de VozLumus Maxima100% (6)
- Compilado - Tecnico - C05 - S Comando e Proteção de Motores CA de BT - Web - NOVODocumento676 páginasCompilado - Tecnico - C05 - S Comando e Proteção de Motores CA de BT - Web - NOVOfabricioAinda não há avaliações
- BrasagemDocumento29 páginasBrasagemCelso Brito100% (1)
- Praticas Gerais de ManutencaoDocumento351 páginasPraticas Gerais de ManutencaoMonica Mascarenhas100% (1)
- Comandos EletroeletrônicosDocumento213 páginasComandos Eletroeletrônicosgiliard100% (1)
- Apostila de Inversores de Frequência 3Documento7 páginasApostila de Inversores de Frequência 3Renato NogueiraAinda não há avaliações
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Documentos de AulaDocumento36 páginasDocumentos de AulaRobson TelesAinda não há avaliações
- Prova Abendi Me - 02Documento7 páginasProva Abendi Me - 02agustpassos100% (1)
- 814.0201-0 SRP 4030 Flex 380V Control Net Danfoss FC101Documento11 páginas814.0201-0 SRP 4030 Flex 380V Control Net Danfoss FC101manutencao inapAinda não há avaliações
- Calculos Instalacoes MotoresDocumento35 páginasCalculos Instalacoes MotoresTonyBonjorniAinda não há avaliações
- Motores Siemens.Documento34 páginasMotores Siemens.Kesley Melo100% (1)
- Catalogo Ancora Chumbador ParaboltDocumento156 páginasCatalogo Ancora Chumbador ParaboltNícoli Galo100% (1)
- Trabalho Fabricacao Botijao de Gas PDFDocumento9 páginasTrabalho Fabricacao Botijao de Gas PDFleandromcsAinda não há avaliações
- Cuidados e Manutencao de Motores EletricosDocumento2 páginasCuidados e Manutencao de Motores EletricosRoberta Sabrina100% (1)
- Tomadas IndustriaisDocumento17 páginasTomadas IndustriaisfabiojxavierAinda não há avaliações
- Contactores - Protecção de Motores - AcessóriosDocumento8 páginasContactores - Protecção de Motores - Acessórios1efycbAinda não há avaliações
- Manual de Programação Hanwha 2020Documento82 páginasManual de Programação Hanwha 2020MaisaGamePlays Wolff100% (2)
- Memorial Descritivo Cabeamento Estruturado e CFTV Supermercado RomaDocumento9 páginasMemorial Descritivo Cabeamento Estruturado e CFTV Supermercado RomaSérgio MoreiraAinda não há avaliações
- Tabela Industry CompletaDocumento1.218 páginasTabela Industry CompletaSteve797979Ainda não há avaliações
- Compilado Técnico Acionamentos ogAZEZKDocumento27 páginasCompilado Técnico Acionamentos ogAZEZKDAYANNE SOUZA RODRIGUES GAMA100% (1)
- Apostila Motor Monofásico Universo Da Elétrica Prof Jadson CaetanoDocumento6 páginasApostila Motor Monofásico Universo Da Elétrica Prof Jadson CaetanoLênin CampolinaAinda não há avaliações
- Catálogo Conduletes e Acessórios PDFDocumento5 páginasCatálogo Conduletes e Acessórios PDFAlessandro E Mali DiasAinda não há avaliações
- Apresentação AngoltecDocumento18 páginasApresentação AngoltecPaulino Mutombo100% (1)
- Resumo - Concretos EspeciaisDocumento7 páginasResumo - Concretos EspeciaisKaue Kawashita100% (1)
- Motores Elétricos SiemensDocumento34 páginasMotores Elétricos Siemens76971495100% (2)
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- Material Didático - Mundo SENAI - ProteçãoDocumento5 páginasMaterial Didático - Mundo SENAI - ProteçãoDiogo Coelho LeiteAinda não há avaliações
- TRANSFORMADORES IdeaisDocumento41 páginasTRANSFORMADORES Ideaisapi-3735445100% (5)
- Analise Elementar Do Mecanismo Da Caixa de VelocidadesDocumento12 páginasAnalise Elementar Do Mecanismo Da Caixa de VelocidadesCastelo GomesAinda não há avaliações
- Bloco M10B ER, MINIPEI E DGS - SOLUÇÃODocumento2 páginasBloco M10B ER, MINIPEI E DGS - SOLUÇÃOCOOK ENERGIA E TELECOMUNICAÇÕES, COM IND LTDAAinda não há avaliações
- Solda Mig - Mag - Trabalho EscolarDocumento21 páginasSolda Mig - Mag - Trabalho EscolarklausahlfAinda não há avaliações
- Geração Distribuida e Smart GridDocumento24 páginasGeração Distribuida e Smart GridrodrsilvAinda não há avaliações
- União TransformadoresDocumento2 páginasUnião TransformadoresMarcelo LacerdaAinda não há avaliações
- Sistemas Elétricos Marítimos - Ele 75 - Aulas 09 e 12Documento14 páginasSistemas Elétricos Marítimos - Ele 75 - Aulas 09 e 12Jefferson T. GiraoAinda não há avaliações
- Manutenção Máquinas Elétricas PDFDocumento76 páginasManutenção Máquinas Elétricas PDFElizeu Paulino50% (2)
- Motores Elétricos - 7 - Motor MonofasicoDocumento26 páginasMotores Elétricos - 7 - Motor Monofasicobaixar arquivosAinda não há avaliações
- Calibração PT100 PDFDocumento10 páginasCalibração PT100 PDFSara LaraAinda não há avaliações
- Disjuntores DR Eletrtomar HagerDocumento2 páginasDisjuntores DR Eletrtomar HagerLourran FreireAinda não há avaliações
- Curso EletoEletronica - Geradores e Motores PDFDocumento55 páginasCurso EletoEletronica - Geradores e Motores PDFIagoFernandesAinda não há avaliações
- Apostila Eletrica PDFDocumento8 páginasApostila Eletrica PDFfatimalfredoAinda não há avaliações
- Manual Do InterfoneDocumento4 páginasManual Do InterfoneadmgilAinda não há avaliações
- Anritsu Guia Rapido Uso MT9083A-B-C Rev 1 Out 2010Documento16 páginasAnritsu Guia Rapido Uso MT9083A-B-C Rev 1 Out 2010ruverAinda não há avaliações
- Isolação de Motor Corrente ContínuaDocumento4 páginasIsolação de Motor Corrente ContínuaRobson TelesAinda não há avaliações
- Lista de Exercicios - Fundamentos Da EletrotécnicaDocumento17 páginasLista de Exercicios - Fundamentos Da EletrotécnicaDaniel Fec FluAinda não há avaliações
- Rede DeviceNetDocumento27 páginasRede DeviceNetwagnertr9162Ainda não há avaliações
- t13 Inversores de FrequenciaDocumento52 páginast13 Inversores de FrequencialsmateusAinda não há avaliações
- Manual 2106LD 00XDocumento31 páginasManual 2106LD 00Xmpr2001Ainda não há avaliações
- Ebook Guia LIDE 1.1 - Sala Da ElétricaDocumento32 páginasEbook Guia LIDE 1.1 - Sala Da ElétricaEudo Silva100% (1)
- Transistores - Teoria e Prática 1 PDFDocumento4 páginasTransistores - Teoria e Prática 1 PDFGuilherme Nagae100% (1)
- E BOOK LadderDocumento15 páginasE BOOK Ladderpatrick_vianaAinda não há avaliações
- Catalogo HeliarDocumento32 páginasCatalogo HeliarCairineLopesAinda não há avaliações
- Rede de Distribuição Subterrânea para CondomíniosDocumento53 páginasRede de Distribuição Subterrânea para CondomíniosLuis Carlos BrandtAinda não há avaliações
- Como Fazer Instalação Elétrica Residencial 2021Documento10 páginasComo Fazer Instalação Elétrica Residencial 2021Jair José MellorAinda não há avaliações
- Tipos de Boiler - Boiler A Gás, Boiler Solar Ou Boiler Elétrico - AquecenorteDocumento22 páginasTipos de Boiler - Boiler A Gás, Boiler Solar Ou Boiler Elétrico - AquecenorteSamo Matavela100% (1)
- Relatorio de Estagio - Modelo 2016Documento9 páginasRelatorio de Estagio - Modelo 2016Antonio CarvalhoAinda não há avaliações
- Trane - Manual de Instalação TRAE e TRCEDocumento31 páginasTrane - Manual de Instalação TRAE e TRCEZeBocao0% (2)
- Aula 7 - Relé de Impulso Por Pulsador, Programador Horário e Segurança em Instalações ElétricasDocumento43 páginasAula 7 - Relé de Impulso Por Pulsador, Programador Horário e Segurança em Instalações ElétricasS. ChavesAinda não há avaliações
- Instalação de Motores ElétricosDocumento33 páginasInstalação de Motores ElétricosJonathas PereiraAinda não há avaliações
- Hidroeletricas 2018-2022 Jan2018Documento1 páginaHidroeletricas 2018-2022 Jan2018boyna_ramoneAinda não há avaliações
- Módulo 1 - Fundamentos - e!COCKPITDocumento31 páginasMódulo 1 - Fundamentos - e!COCKPITGILBERTO M. S. PENIDOAinda não há avaliações
- Placa de Identificação Motores WEGDocumento1 páginaPlaca de Identificação Motores WEGAndré Zardo CruberAinda não há avaliações
- Diagramas de Motores Elétricos e Dispositivos de AcionamentosDocumento12 páginasDiagramas de Motores Elétricos e Dispositivos de AcionamentosJULIANOAinda não há avaliações
- Ligacões de Motores de Indução TrifásicosDocumento9 páginasLigacões de Motores de Indução TrifásicosJULIANOAinda não há avaliações
- Exercícios Sobre Potência Elétrica em CCDocumento1 páginaExercícios Sobre Potência Elétrica em CCJULIANOAinda não há avaliações
- Acionamentos Aula02 DispositivosDocumento40 páginasAcionamentos Aula02 DispositivosJULIANOAinda não há avaliações
- 001 - Primeira Lei de OhmDocumento1 página001 - Primeira Lei de OhmJudson JuniorAinda não há avaliações
- Apostila de Analise de Circuitos Parte I PDFDocumento43 páginasApostila de Analise de Circuitos Parte I PDFJULIANOAinda não há avaliações
- Aula 2 Eletromagnetismo 01Documento52 páginasAula 2 Eletromagnetismo 01JULIANOAinda não há avaliações
- Material Sobre Motores Elétricos PDFDocumento10 páginasMaterial Sobre Motores Elétricos PDFJULIANOAinda não há avaliações
- Avaliação Semanal III e IVDocumento8 páginasAvaliação Semanal III e IVMarcos LimaAinda não há avaliações
- Basse PoliesterDocumento3 páginasBasse PoliesterpaulinosancjarojasAinda não há avaliações
- Aocp 2014Documento11 páginasAocp 2014Gustavo CostaAinda não há avaliações
- Silo - Tips Sistema de Osmose Reversa BaumerDocumento12 páginasSilo - Tips Sistema de Osmose Reversa BaumerFrancisco MartinezAinda não há avaliações
- Lista 1 MGT 2020 2Documento4 páginasLista 1 MGT 2020 2Ueverton FreireAinda não há avaliações
- NBR 6489 Solo - Prova de Carga Estática em Fundação DiretaDocumento15 páginasNBR 6489 Solo - Prova de Carga Estática em Fundação DiretaTássia NetoAinda não há avaliações
- Laboratório de AED-01 - 03 - Pré-Lab 01 - Experimento de Reynolds-Perda de Carga-Instabilidade de Rayleigh-TaylorDocumento27 páginasLaboratório de AED-01 - 03 - Pré-Lab 01 - Experimento de Reynolds-Perda de Carga-Instabilidade de Rayleigh-TaylorFernando Antonio dos Santos DinizAinda não há avaliações
- Calendário de Plano de Manutenção - BASEDocumento10 páginasCalendário de Plano de Manutenção - BASEamanda8medeiros-5Ainda não há avaliações
- O Projeto Secreto de Einstein - Vitor Alexandre Chnee PDFDocumento231 páginasO Projeto Secreto de Einstein - Vitor Alexandre Chnee PDFjdjm1Ainda não há avaliações
- Instruções de Montagem e Operação: Redutores Das Séries R.., F.., K.., S.., SPIROPLAN W.Documento236 páginasInstruções de Montagem e Operação: Redutores Das Séries R.., F.., K.., S.., SPIROPLAN W.Jhenifer Da Silva Dias AlvesAinda não há avaliações
- Bocais para Tubos Ap PDFDocumento13 páginasBocais para Tubos Ap PDFflávio_isaiaAinda não há avaliações
- Ceperj 2012 Cedae RJ Engenheiro Eletricista ProvaDocumento8 páginasCeperj 2012 Cedae RJ Engenheiro Eletricista Provafelipealves13Ainda não há avaliações
- Experimento 5Documento3 páginasExperimento 5João FelipeAinda não há avaliações
- MANUAL DE INSTRUCAO CTSI Caminhao Transbordo Santa IzabelDocumento16 páginasMANUAL DE INSTRUCAO CTSI Caminhao Transbordo Santa IzabelZeka Borgato0% (1)
- Trabalho de Ciências - MagnetismoDocumento6 páginasTrabalho de Ciências - MagnetismoLucas DihlAinda não há avaliações
- 1700 Questões - Parte 2 PDFDocumento594 páginas1700 Questões - Parte 2 PDFWendel MeloAinda não há avaliações
- Tabela de Componentes Elétricos CompressoresDocumento12 páginasTabela de Componentes Elétricos CompressoresSergio PinheiroAinda não há avaliações
- Relatório Completo 2Documento12 páginasRelatório Completo 2Camila Sciena100% (1)
- Nota de Aula 2Documento10 páginasNota de Aula 2Isak XavierAinda não há avaliações
- Aula 14 Estudo Dos Geradores ElétricosDocumento24 páginasAula 14 Estudo Dos Geradores ElétricosEric DerreAinda não há avaliações
- Roteiro 10 - Sintese - Cu - Glicinato - Espectroscopia UV-Vis - Versaonova - 2023 - QuiÌ Mica e Engenharia - 02032023-2Documento13 páginasRoteiro 10 - Sintese - Cu - Glicinato - Espectroscopia UV-Vis - Versaonova - 2023 - QuiÌ Mica e Engenharia - 02032023-2Victor RodriguesAinda não há avaliações
- N-2785 Contec Monitoração, Interpretação e Controle Da Corrosão Interna em DutosDocumento75 páginasN-2785 Contec Monitoração, Interpretação e Controle Da Corrosão Interna em DutosRobert EinstenAinda não há avaliações
- Setor de Ensaios ElétricosDocumento13 páginasSetor de Ensaios ElétricosLeonardo CiossaniAinda não há avaliações
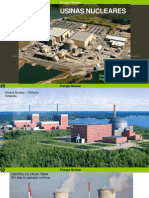
- Usinas Nucleares 2021 RogrioDocumento161 páginasUsinas Nucleares 2021 RogrioLucas SoaresAinda não há avaliações
- Aula05 Remoto ExercíciosDocumento4 páginasAula05 Remoto ExercíciosEmerson MatheusAinda não há avaliações