Você também pode gostar
- Lista Algebra LinearDocumento8 páginasLista Algebra LinearLucas MoreiraAinda não há avaliações
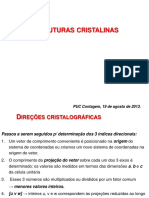
- Estru..cristalina 3..fator de Empacotamento..dens. LinearDocumento25 páginasEstru..cristalina 3..fator de Empacotamento..dens. LinearFabaoabrAinda não há avaliações
- Espaços e Subespaços Vetoriais1Documento30 páginasEspaços e Subespaços Vetoriais1Alessandro BastosAinda não há avaliações
- Espaços e Subespaços VetoriaisDocumento30 páginasEspaços e Subespaços VetoriaisAlessandro BastosAinda não há avaliações
- Circuitos Elétricos - ThéveninDocumento4 páginasCircuitos Elétricos - ThéveninAmanda NergerAinda não há avaliações
- Exercicios Avaliativos 1 AmpOp LinearesDocumento5 páginasExercicios Avaliativos 1 AmpOp LinearesFELIPY PENHA BOTEGAAinda não há avaliações
- ELETRONICADocumento25 páginasELETRONICAHenrique LopesAinda não há avaliações
- Slides ACII - Tema 2 Trifásicos (17out20)Documento51 páginasSlides ACII - Tema 2 Trifásicos (17out20)moreira287Ainda não há avaliações
- Aula3 VetoresDocumento20 páginasAula3 VetoresvitorAinda não há avaliações
- Aula 16 SEPsDocumento29 páginasAula 16 SEPsLetyflixAinda não há avaliações
- CAP3SDocumento30 páginasCAP3SHenry HcAinda não há avaliações
- Aula 10Documento10 páginasAula 10Amparo AlmeidaAinda não há avaliações
- Tabel AsDocumento2 páginasTabel AsRodrigo RamosAinda não há avaliações
- Prática 2Documento5 páginasPrática 2Rodrigo RamosAinda não há avaliações
- Exercicios AmpOp Lineares 2019Documento7 páginasExercicios AmpOp Lineares 2019FELIPY PENHA BOTEGAAinda não há avaliações
- R C L em Corrente AlternadaDocumento8 páginasR C L em Corrente AlternadaAndre Rodriguez SpirimAinda não há avaliações
- Lista de Algebra Linear Nº 1Documento2 páginasLista de Algebra Linear Nº 1benicio100% (1)
- Exercício 02Documento3 páginasExercício 02Conta NetflixAinda não há avaliações
- Relatório Diodo ZenerDocumento7 páginasRelatório Diodo ZenerLeonardoJunqueiraAinda não há avaliações
- Ga Aulapratica01 GabaritoDocumento10 páginasGa Aulapratica01 GabaritoEthos IgniAinda não há avaliações
- Resolucao de Exercico 3 FinalizadoDocumento5 páginasResolucao de Exercico 3 FinalizadoAbraz BamoAinda não há avaliações
- Aula 7 FasoresDocumento14 páginasAula 7 FasoresDiogoAinda não há avaliações
- Aula 7 FasoresDocumento14 páginasAula 7 FasoresDiogoAinda não há avaliações
- Diode Diodos RetificadorDocumento11 páginasDiode Diodos Retificadorjose luizAinda não há avaliações
- Mat Ensino 03 - Vetores e Algebra Vetorial RESOL EXERC 2017-1Documento11 páginasMat Ensino 03 - Vetores e Algebra Vetorial RESOL EXERC 2017-1Sebastião CorrêaAinda não há avaliações
- Geometria AnaliticaDocumento23 páginasGeometria AnaliticaOctavio Mario MuchangaAinda não há avaliações
- Vetores Teoria + Exercicios de FixaçãoDocumento2 páginasVetores Teoria + Exercicios de FixaçãoLaís CiriacoAinda não há avaliações
- Combinação Linear - Sérgio Ricardo de Brito GadelhaDocumento9 páginasCombinação Linear - Sérgio Ricardo de Brito GadelhaVinicius Machado Pereira dos santosAinda não há avaliações
- R2 PEA3311 2021 Transformadores ModeloRELATORIODocumento16 páginasR2 PEA3311 2021 Transformadores ModeloRELATORIOAndré FerreiraAinda não há avaliações
- Geometria Analà - Tica Vetores em IRnDocumento27 páginasGeometria Analà - Tica Vetores em IRnAninha De Oliveira SilvaAinda não há avaliações
- A) Taxa de RealimentaçãoDocumento8 páginasA) Taxa de Realimentaçãovieira.george8082Ainda não há avaliações
- Operacoes Com VetoresDocumento9 páginasOperacoes Com VetoresLady CarvalhoAinda não há avaliações
- Algebra LuisDocumento13 páginasAlgebra LuisLir Jr.Ainda não há avaliações
- Electronics ExercisesDocumento17 páginasElectronics ExercisesZyphon400Ainda não há avaliações
- 2 (B) Lista de Exercícios Espaço Vetorial - 21Documento3 páginas2 (B) Lista de Exercícios Espaço Vetorial - 21Rafael PorfirioAinda não há avaliações
- Exerc Cios de Lgebra Linear IIDocumento3 páginasExerc Cios de Lgebra Linear IIDilza HelenaAinda não há avaliações
- 2a Lista de Exercicios GERSONDocumento4 páginas2a Lista de Exercicios GERSONDouglas Roberto Santos da SilvaAinda não há avaliações
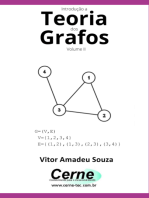
- GrafosDocumento20 páginasGrafosRita BezerraAinda não há avaliações
- Algebra Fatec2011Documento8 páginasAlgebra Fatec2011Alexandre AlvesAinda não há avaliações
- Lab 5 Potencia Ativa e ReativaDocumento10 páginasLab 5 Potencia Ativa e ReativaPedro MarcolinAinda não há avaliações
- Aula 5Documento11 páginasAula 5Adilson KatendeAinda não há avaliações
- Pré Relatório Eletrônica I UFSCDocumento3 páginasPré Relatório Eletrônica I UFSCGustavo NollaAinda não há avaliações
- 01 - VetoresDocumento12 páginas01 - Vetorespoffo_edu6665Ainda não há avaliações
- Apostila 03 VetoresDocumento2 páginasApostila 03 VetoresPedro RochaAinda não há avaliações
- Exp. 12 - BobinasDocumento3 páginasExp. 12 - BobinasSamuel MotaAinda não há avaliações
- Tratamento Algebrico de VectoresDocumento22 páginasTratamento Algebrico de VectoresVicente Xavier ChocancuneneAinda não há avaliações
- Difração de Raios-X (Max)Documento18 páginasDifração de Raios-X (Max)hey viAinda não há avaliações
- Lista 20do 20andrade 201Documento10 páginasLista 20do 20andrade 201Gabriel CôrtesAinda não há avaliações
- 10259-Aplicações de Autovalores e Autovetores Na Eng ElétricaDocumento8 páginas10259-Aplicações de Autovalores e Autovetores Na Eng ElétricaFilipe Dutra MayerAinda não há avaliações
- Apostila Algebra LinearDocumento92 páginasApostila Algebra LinearwisterAinda não há avaliações
- VetoresDocumento15 páginasVetoresEdison Fernandes MottaAinda não há avaliações
- (Algebra Linear) Vetores No Plano e No Espaço Parte 3Documento24 páginas(Algebra Linear) Vetores No Plano e No Espaço Parte 3Nickolas Cavalcanti100% (1)
- Álgebra Linear - Aula 11 - Espaço Vetorial - Base e DimensãoDocumento7 páginasÁlgebra Linear - Aula 11 - Espaço Vetorial - Base e DimensãoVitor SilvaAinda não há avaliações
- 1-AULA SENAI Sistema de CoordenadasDocumento17 páginas1-AULA SENAI Sistema de CoordenadasFabricio MendesAinda não há avaliações
- Estudo Dirigido Álgebra Linear (2 AV)Documento2 páginasEstudo Dirigido Álgebra Linear (2 AV)RobertoCTeixeirAinda não há avaliações
- Diodos - Relatorio CientíficoDocumento5 páginasDiodos - Relatorio CientíficoEduardo SouzaAinda não há avaliações
- Analogia Geométrica E Produtos De Vetores Em N DimensõesNo EverandAnalogia Geométrica E Produtos De Vetores Em N DimensõesAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Aula 14 - Fiação PDFDocumento4 páginasAula 14 - Fiação PDFGabriel DimitriAinda não há avaliações
- Udesc - Gabriel Dimitri Granemann Santana - Plano de Trabalho - Ppgeel - 2022.1Documento15 páginasUdesc - Gabriel Dimitri Granemann Santana - Plano de Trabalho - Ppgeel - 2022.1Gabriel DimitriAinda não há avaliações
- SVM TrabalhoDocumento25 páginasSVM TrabalhoGabriel DimitriAinda não há avaliações
- Exemplo de Projeto ArquitetônicoDocumento21 páginasExemplo de Projeto ArquitetônicoGabriel DimitriAinda não há avaliações
- Exemplo de Projeto HidrossanitárioDocumento8 páginasExemplo de Projeto HidrossanitárioGabriel Dimitri100% (1)
- ProjetoDocumento1 páginaProjetoGabriel DimitriAinda não há avaliações
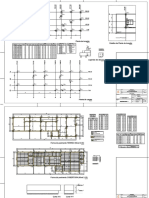
- Exemplo de Projeto EstruturalDocumento7 páginasExemplo de Projeto EstruturalGabriel DimitriAinda não há avaliações
- TCC1 - Avaliação de Cargas para Correção Do Fator de Deslocamento - Banca - Rev10Documento139 páginasTCC1 - Avaliação de Cargas para Correção Do Fator de Deslocamento - Banca - Rev10Gabriel DimitriAinda não há avaliações
- Policlinica - Layout 1 - Consultórios - Janeiro 2022Documento1 páginaPoliclinica - Layout 1 - Consultórios - Janeiro 2022Gabriel DimitriAinda não há avaliações
- TCC1 - Avaliação de Cargas para Correção Do Fator de Deslocamento - 16 - 11 - 2021Documento122 páginasTCC1 - Avaliação de Cargas para Correção Do Fator de Deslocamento - 16 - 11 - 2021Gabriel DimitriAinda não há avaliações
- TCC1 - Avaliação de Cargas para Correção Do Fator de DeslocamentDocumento115 páginasTCC1 - Avaliação de Cargas para Correção Do Fator de DeslocamentGabriel DimitriAinda não há avaliações
- Checklist Conferência ProjeosDocumento2 páginasChecklist Conferência ProjeosGabriel DimitriAinda não há avaliações
- I3210039 I3210039 Travessia Vias Com Ramal Ou Rede Subterranea 27nov2018Documento1 páginaI3210039 I3210039 Travessia Vias Com Ramal Ou Rede Subterranea 27nov2018Gabriel DimitriAinda não há avaliações
- BR PneumáticosDocumento38 páginasBR PneumáticosLeon FelipeAinda não há avaliações
- Catálogo de Peças de Reposição: Atualizado Em: Julho/2013Documento402 páginasCatálogo de Peças de Reposição: Atualizado Em: Julho/2013Reginaldo BersaniAinda não há avaliações
- Manual Técnico Gp8 12laDocumento24 páginasManual Técnico Gp8 12laWillerEstevesAinda não há avaliações
- 2 Classificados Recentes - Página 2 de 10 - Negrini ClassificadosDocumento9 páginas2 Classificados Recentes - Página 2 de 10 - Negrini ClassificadosStafferOliveiraAinda não há avaliações
- Job - Comp Code PDFDocumento87 páginasJob - Comp Code PDFLucas MoreiraAinda não há avaliações
- Lista de Peças CPM (VR) 20-30Documento56 páginasLista de Peças CPM (VR) 20-30UILSONAinda não há avaliações
- Dicas de Manutencão em Aparelhos de SomDocumento7 páginasDicas de Manutencão em Aparelhos de SomEurides Vicente MarcondesAinda não há avaliações
- Catalogo de Serviço Geral Mf8690Documento324 páginasCatalogo de Serviço Geral Mf8690Geovane PereiraAinda não há avaliações
- Códigos de Bips Das BiosDocumento8 páginasCódigos de Bips Das BiosAlmg GmlaAinda não há avaliações
- Contemp K, T KTDocumento88 páginasContemp K, T KTIsrael SilvaAinda não há avaliações
- Manual Good Light PlusDocumento1 páginaManual Good Light PlusRodrigo SilvaAinda não há avaliações
- Catalogo Bosh Rotor, Tampa, BobinaDocumento445 páginasCatalogo Bosh Rotor, Tampa, BobinadiegopostAinda não há avaliações
- Catalogo Compacto Tramontina PRO 2012Documento88 páginasCatalogo Compacto Tramontina PRO 2012eduardoskycutAinda não há avaliações
- Catalogo1 PDFDocumento110 páginasCatalogo1 PDFEloizioMecanico100% (1)
- TUTORIAL MÓDULO PONTE-H L298 - Reduzido PDFDocumento9 páginasTUTORIAL MÓDULO PONTE-H L298 - Reduzido PDFLeandro RibeiroAinda não há avaliações
- Guia Aula Prática 01Documento3 páginasGuia Aula Prática 01Milene OliveiraAinda não há avaliações
- Sony Home Theater - Dav-Dz120kDocumento95 páginasSony Home Theater - Dav-Dz120kPaulo Roberto s freire67% (3)
- Alternador - EsquemaDocumento35 páginasAlternador - EsquemaErivaldo Gonçalves100% (1)
- Sistema de Freio - ABSDocumento2 páginasSistema de Freio - ABSDedeh SilvaAinda não há avaliações
- Amplificadores de Potência A B Ab PDFDocumento10 páginasAmplificadores de Potência A B Ab PDFroberto336545-1Ainda não há avaliações
- PDF Manual de Operaao l60f l70f l90f CompressDocumento250 páginasPDF Manual de Operaao l60f l70f l90f CompressStop RUSH100% (1)