Você também pode gostar
- Dimensionamento de instalação de bombeamentoDocumento29 páginasDimensionamento de instalação de bombeamentoCleber Fenrir Vitorio100% (1)
- Aula 1 - Combinações de AçoesDocumento20 páginasAula 1 - Combinações de AçoesGuilherme Casanova BrancoAinda não há avaliações
- Projetar sarjeta e calcular eficiência de gradeDocumento5 páginasProjetar sarjeta e calcular eficiência de gradeTiago OliveiraAinda não há avaliações
- Fórmulas Mecânica Dos SolosDocumento1 páginaFórmulas Mecânica Dos SolosjuniomfAinda não há avaliações
- Domínios de deformação em vigas de concreto armadoDocumento8 páginasDomínios de deformação em vigas de concreto armadoRicardo BorgesAinda não há avaliações
- Mecânica dos Fluidos - Lista de Exercícios 1Documento4 páginasMecânica dos Fluidos - Lista de Exercícios 1Wagner José TrevelimAinda não há avaliações
- Apostila Pontes de Concreto Passo A Passo 1 PDFDocumento19 páginasApostila Pontes de Concreto Passo A Passo 1 PDFEliônidas X CristianeAinda não há avaliações
- Lista de Exercícios SaneamentoDocumento2 páginasLista de Exercícios SaneamentoCledson Richardy LimaAinda não há avaliações
- Bombas em sistemas de abastecimento de água: problemas e soluçõesDocumento2 páginasBombas em sistemas de abastecimento de água: problemas e soluçõesCleiton SimetteAinda não há avaliações
- Método Da FlexibilidadeDocumento15 páginasMétodo Da FlexibilidadeRenatinhaNettoAinda não há avaliações
- Tema 05 - Trac3a7ado em Planta-Implantacao de Curvas SimplesDocumento7 páginasTema 05 - Trac3a7ado em Planta-Implantacao de Curvas Simplesjoaquim meque100% (2)
- Dimensionamento de Estruturas de Concreto ProtendidoDocumento3 páginasDimensionamento de Estruturas de Concreto ProtendidoRamon Costa NascimentoAinda não há avaliações
- Equação de Bernoulli e problemas de escoamento em canais e dutosDocumento9 páginasEquação de Bernoulli e problemas de escoamento em canais e dutosVictor SantosAinda não há avaliações
- Verificação de perfis metálicos sob flexão considerando influência de furosDocumento17 páginasVerificação de perfis metálicos sob flexão considerando influência de furosualaceAinda não há avaliações
- Diagramas de esforços em vigas isostáticasDocumento6 páginasDiagramas de esforços em vigas isostáticasMiguel Dantas de SantanaAinda não há avaliações
- Colunas: Estabilidade e Fórmula de EulerDocumento14 páginasColunas: Estabilidade e Fórmula de EulerIvan210Ainda não há avaliações
- Deformação 1Documento25 páginasDeformação 1Lilian Queiroz DaguanoAinda não há avaliações
- 1 - Flexão Composta Normal PDFDocumento27 páginas1 - Flexão Composta Normal PDFDaniel Agostini CruzAinda não há avaliações
- Problemas Resolvidos e ExplicadosDocumento74 páginasProblemas Resolvidos e ExplicadosCristian ViverosAinda não há avaliações
- Tabel Perfil EnrijecidoDocumento2 páginasTabel Perfil EnrijecidoMarciel UnepróAinda não há avaliações
- PONTES - Exercícios 01 (Armadura de Flexão)Documento4 páginasPONTES - Exercícios 01 (Armadura de Flexão)Marcella LorenaAinda não há avaliações
- Apostila Sistemas Estruturais II VIGA ALAVANCA-r2Documento18 páginasApostila Sistemas Estruturais II VIGA ALAVANCA-r2Jessica FonsecaAinda não há avaliações
- Projeto de recapeamento asfáltico e drenagem em Iaçu-BADocumento19 páginasProjeto de recapeamento asfáltico e drenagem em Iaçu-BAJose Cicero100% (1)
- Função de Varias VariáveisDocumento3 páginasFunção de Varias Variáveisfernando melo0% (1)
- Dimensionamento econômico de canaisDocumento13 páginasDimensionamento econômico de canaisAnderson CidesAinda não há avaliações
- Dimensionamento de sapatas de fundação para pilares submetidos a esforços axiais e fletoresDocumento2 páginasDimensionamento de sapatas de fundação para pilares submetidos a esforços axiais e fletoresLauro MotaAinda não há avaliações
- 330650-Civil - 2017 - Fisica II - Cap. 02 - Campo Eletrico IIDocumento16 páginas330650-Civil - 2017 - Fisica II - Cap. 02 - Campo Eletrico IIWilliam PolAinda não há avaliações
- Determinação da perda de carga em tubulaçõesDocumento16 páginasDeterminação da perda de carga em tubulaçõesAriana MelloAinda não há avaliações
- Apostila Sobre Tipos de ContençõesDocumento34 páginasApostila Sobre Tipos de ContençõesCesar AugustoAinda não há avaliações
- AULA 01 (14.02.19) - Capítulo 8.2 - Perda de CargaDocumento19 páginasAULA 01 (14.02.19) - Capítulo 8.2 - Perda de CargaMaria VitoriaAinda não há avaliações
- Planilha Orçamentária ModeloDocumento99 páginasPlanilha Orçamentária ModeloJúlioCésarBotelho100% (1)
- Dimensionamento de seções retangularesDocumento1 páginaDimensionamento de seções retangularesJairo GonzagaAinda não há avaliações
- Apostila PrimoDocumento85 páginasApostila PrimoSofia GilóAinda não há avaliações
- Capítulo 9Documento21 páginasCapítulo 9diegofoureauxAinda não há avaliações
- Dinâmica Dos FluidosDocumento60 páginasDinâmica Dos FluidosSANDRO SALOMÃO YURIAinda não há avaliações
- 03 - MEC - SOL - III - Deslocamentos - em - Peças - Retilíneas - Fle TidasDocumento66 páginas03 - MEC - SOL - III - Deslocamentos - em - Peças - Retilíneas - Fle TidasMoisés Brazão Dias JúniorAinda não há avaliações
- Exercicios Unid.1.1 A 2.1 - Pedro CruzDocumento5 páginasExercicios Unid.1.1 A 2.1 - Pedro CruzPedro CesarAinda não há avaliações
- Capacidade máx. reservatório laje armadaDocumento4 páginasCapacidade máx. reservatório laje armadaYuri SilvaAinda não há avaliações
- Hidráulica Agrícola: Exercícios de Perdas de Carga em CondutasDocumento23 páginasHidráulica Agrícola: Exercícios de Perdas de Carga em CondutasRuana VianaAinda não há avaliações
- Produto vetorial e escalarDocumento5 páginasProduto vetorial e escalarBrian I. Kate100% (1)
- PUC-GO Estruturas II exercícios método deslocamentosDocumento4 páginasPUC-GO Estruturas II exercícios método deslocamentosFlavio Augustus100% (1)
- Estado de Tensao em MaciÇos TerrososDocumento5 páginasEstado de Tensao em MaciÇos TerrososCamila Bernardy MartinezAinda não há avaliações
- Cálculo estrutural de laje, viga e pilar de concreto armadoDocumento41 páginasCálculo estrutural de laje, viga e pilar de concreto armadoAna Carolina ZanonAinda não há avaliações
- Determinação do módulo de elasticidade de solo arenoso compactado utilizando ensaios de ultrassomDocumento12 páginasDeterminação do módulo de elasticidade de solo arenoso compactado utilizando ensaios de ultrassomTayssa MarquesAinda não há avaliações
- Tensão X Deformação 2021Documento17 páginasTensão X Deformação 2021Rodrigo Felix33100% (1)
- Dimensão de lajesDocumento7 páginasDimensão de lajesstaden1000Ainda não há avaliações
- Cálculo de Lajes TreliçadasDocumento9 páginasCálculo de Lajes TreliçadasMarcos QueirózAinda não há avaliações
- Secao 4 Deflexoes de VigasDocumento2 páginasSecao 4 Deflexoes de VigasJoão DurvalAinda não há avaliações
- #029 - Live Do Nelso - Dimensionamento de Laje Treliçada PDFDocumento3 páginas#029 - Live Do Nelso - Dimensionamento de Laje Treliçada PDFPetrovisk MedeirosAinda não há avaliações
- Coeficientes de Recalque Horizontal e Vertical Do SoloDocumento9 páginasCoeficientes de Recalque Horizontal e Vertical Do SoloCharles Ramon Maia OliveiraAinda não há avaliações
- Apostila de Análise Estrutural I - Pórticos IsostáticosDocumento6 páginasApostila de Análise Estrutural I - Pórticos IsostáticosCaykeLuisAinda não há avaliações
- B.095 SISTEMA DE CORRER RPTDocumento2 páginasB.095 SISTEMA DE CORRER RPTHelder CostaAinda não há avaliações
- Lista Ndices Fsicos - Completa UFRNDocumento7 páginasLista Ndices Fsicos - Completa UFRNhunter hunterAinda não há avaliações
- Aglomerantes, gesso e cal aérea: introdução e propriedadesDocumento25 páginasAglomerantes, gesso e cal aérea: introdução e propriedadesAriel MassonAinda não há avaliações
- Coeficiente de SeguranaDocumento4 páginasCoeficiente de SeguranaJoão LucasAinda não há avaliações
- Iot Para Medir Dinamômetro Com Esp32 Programado Em ArduinoNo EverandIot Para Medir Dinamômetro Com Esp32 Programado Em ArduinoAinda não há avaliações
- Pontes em concreto armado: Análise e dimensionamentoNo EverandPontes em concreto armado: Análise e dimensionamentoAinda não há avaliações
- Projeto de mola helicoidal, embreagem de disco e eixo para transmissão de potênciaDocumento4 páginasProjeto de mola helicoidal, embreagem de disco e eixo para transmissão de potênciaTheoAinda não há avaliações
- R_Lista1Documento1 páginaR_Lista1Tiago Rodrigues MendonçaAinda não há avaliações
- Tema 5 Torc3a7c3a3o Al 2Documento19 páginasTema 5 Torc3a7c3a3o Al 2Eduardo Zefanias CumbaneAinda não há avaliações
- Técnicas para elaborar relatórios de pesquisaDocumento13 páginasTécnicas para elaborar relatórios de pesquisaEduardo Zefanias Cumbane100% (1)
- A Erosão É Um Dos Problemas Naturais Mais RecorrentesDocumento3 páginasA Erosão É Um Dos Problemas Naturais Mais RecorrentesEduardo Zefanias CumbaneAinda não há avaliações
- A LeituraDocumento29 páginasA LeituraEduardo Zefanias CumbaneAinda não há avaliações
- Memoria Descritiva Do JJDocumento6 páginasMemoria Descritiva Do JJEduardo Zefanias CumbaneAinda não há avaliações
- Carta de ApresentaçãoDocumento2 páginasCarta de ApresentaçãoEduardo Zefanias CumbaneAinda não há avaliações
- Pre CandidaturaterminadaDocumento1 páginaPre CandidaturaterminadaEduardo Zefanias CumbaneAinda não há avaliações
- Lecn PT 4a 1s Uc Betão Armado IDocumento2 páginasLecn PT 4a 1s Uc Betão Armado IEduardo Zefanias CumbaneAinda não há avaliações
- Projecto EcoModel Acty Moçambique.Documento4 páginasProjecto EcoModel Acty Moçambique.Eduardo Zefanias CumbaneAinda não há avaliações
- Relatório Do Trabalho de PetrologiaDocumento2 páginasRelatório Do Trabalho de PetrologiaEduardo Zefanias CumbaneAinda não há avaliações
- Modulo 1Documento20 páginasModulo 1Eduardo Zefanias CumbaneAinda não há avaliações
- Betão Pré-EsforçadoDocumento203 páginasBetão Pré-EsforçadoSérgio BernardesAinda não há avaliações
- Calculo de Confiabilidade PDFDocumento9 páginasCalculo de Confiabilidade PDFmasi1975Ainda não há avaliações
- Acompanhamento personalizado em matemáticaDocumento96 páginasAcompanhamento personalizado em matemáticajulianaAinda não há avaliações
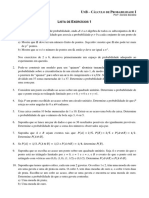
- Lista de Exercícios de ProbabilidadeDocumento4 páginasLista de Exercícios de ProbabilidadeGabriel RibeiroAinda não há avaliações
- Conceitos Lógicos MatemáticosDocumento12 páginasConceitos Lógicos Matemáticosrutharmaduras2619Ainda não há avaliações
- Teoria e Fundamentos Da ComputaçãoDocumento118 páginasTeoria e Fundamentos Da ComputaçãoHugo RochaAinda não há avaliações
- Matematica 1664038488Documento3 páginasMatematica 1664038488Cristian Azevedo100% (2)
- Matemática desafio 9o anoDocumento14 páginasMatemática desafio 9o anoOtavio NetoAinda não há avaliações
- Matemática Elementar Teste 1h15Documento2 páginasMatemática Elementar Teste 1h15Patrícia Trindade100% (1)
- Matemática Financeira na HP 12C e ExcelDocumento29 páginasMatemática Financeira na HP 12C e ExcelChirlene MaiaAinda não há avaliações
- UDESC ESAG Estatística I aula exercícios distribuições aleatóriasDocumento2 páginasUDESC ESAG Estatística I aula exercícios distribuições aleatóriasGabriel DiasAinda não há avaliações
- Exercicio PythonDocumento17 páginasExercicio PythonfredsoncbrlAinda não há avaliações
- Anexo Aula 948 13022023200910 73127Documento16 páginasAnexo Aula 948 13022023200910 73127Priscila RibeiroAinda não há avaliações
- Apostila 1º Ano 2.2021Documento90 páginasApostila 1º Ano 2.2021Carolina MartinsAinda não há avaliações
- Cálculo de ProbabilidadesDocumento4 páginasCálculo de ProbabilidadesRaimundoAinda não há avaliações
- Aula Teoria de ErrosDocumento22 páginasAula Teoria de ErrosDacabaca DucubucuAinda não há avaliações
- Matemática: Problemas e Exercícios de Frações DecimaisDocumento1 páginaMatemática: Problemas e Exercícios de Frações DecimaisDiogo CorreiaAinda não há avaliações
- Prova Resolvida - TRT - 4 Região - RS - 2011 - FCCDocumento5 páginasProva Resolvida - TRT - 4 Região - RS - 2011 - FCCrenanbitencourt2010Ainda não há avaliações
- Exemplos - Aula.8 - Paulo TeixieraDocumento65 páginasExemplos - Aula.8 - Paulo TeixieraPaulo Dã Nascimento TeixeiraAinda não há avaliações
- Assistente-Administrativo A ReferencialEFADocumento38 páginasAssistente-Administrativo A ReferencialEFASuzana PimentelAinda não há avaliações
- Lista Teste 1Documento4 páginasLista Teste 1Luh BatistaAinda não há avaliações
- 2.estatística Descritiva (Análise Exploratória de Dados) PDFDocumento11 páginas2.estatística Descritiva (Análise Exploratória de Dados) PDFRogerio Dos SantosAinda não há avaliações
- Química Analítica Quantitativa: Métodos, Erros e Tratamento de DadosDocumento124 páginasQuímica Analítica Quantitativa: Métodos, Erros e Tratamento de DadosJuliano CordeiroAinda não há avaliações
- Consumo automóvel gráfico velocidadeDocumento6 páginasConsumo automóvel gráfico velocidadeGilsonSouzaAinda não há avaliações
- Aula 1 Vetores NoçãoDocumento3 páginasAula 1 Vetores NoçãoMarcos Freitas de MoraesAinda não há avaliações
- Trigonometria - Lista de ProblemasDocumento13 páginasTrigonometria - Lista de ProblemasfsfhtduAinda não há avaliações
- Desenho dos diagramas de BodeDocumento20 páginasDesenho dos diagramas de BodeANA ELEIDY DA SILVA BELOTIAinda não há avaliações
- Medição e unidades de medida no Sistema InternacionalDocumento38 páginasMedição e unidades de medida no Sistema InternacionalHeverton DiasAinda não há avaliações
- Códigos corretores de errosDocumento53 páginasCódigos corretores de errosSézani CarvalhoAinda não há avaliações
- Prova de Matemática do Colégio Militar de Belo HorizonteDocumento12 páginasProva de Matemática do Colégio Militar de Belo HorizonteGuilherme de OliveiraAinda não há avaliações
- Eureka10 PDFDocumento61 páginasEureka10 PDFlos sabios100% (1)