Você também pode gostar
- SI unidades e cargas elétricasDocumento222 páginasSI unidades e cargas elétricasMiguel Vidal GalvãoAinda não há avaliações
- Física - CEESVO - Apostila1Documento57 páginasFísica - CEESVO - Apostila1Vestibular Apostilas100% (5)
- Revisão de Matemática para o Sistema Internacional de MedidasDocumento24 páginasRevisão de Matemática para o Sistema Internacional de MedidasNando100% (1)
- Aula 01 BiofisicaDocumento8 páginasAula 01 Biofisicaapi-3724336Ainda não há avaliações
- O que é física e suas grandezasDocumento4 páginasO que é física e suas grandezasMichelle VilanovaAinda não há avaliações
- Apostila de Estudos - 2Documento33 páginasApostila de Estudos - 2Delcon RicardoAinda não há avaliações
- Noções de Grandezas FísicasDocumento57 páginasNoções de Grandezas Físicasclaudio barnabeAinda não há avaliações
- Unidades de Medida e Sistemas de MediçãoDocumento4 páginasUnidades de Medida e Sistemas de Mediçãoerika_martino_2Ainda não há avaliações
- Electrotecnia 11 CLDocumento21 páginasElectrotecnia 11 CLQuizonge Lundemba100% (2)
- Determinação da densidade de um corpo de prova utilizando diferentes provetasDocumento5 páginasDeterminação da densidade de um corpo de prova utilizando diferentes provetasMarcio GambôaAinda não há avaliações
- Apostila Materiais e Máquinas-Modulo-02Documento37 páginasApostila Materiais e Máquinas-Modulo-02Arlan FNAinda não há avaliações
- Definição do metro e conversão de unidades de comprimentoDocumento26 páginasDefinição do metro e conversão de unidades de comprimentoLeandro SilvaAinda não há avaliações
- Física MagnitudesDocumento17 páginasFísica MagnitudesflowerbaguesAinda não há avaliações
- Aula1 (2023 - Alunos-Fisica)Documento16 páginasAula1 (2023 - Alunos-Fisica)André António Xavier MenezesAinda não há avaliações
- Pratica 1Documento8 páginasPratica 1Felisberto LimaAinda não há avaliações
- Sistemas de Unidades e Análise dimensional em FísicaDocumento3 páginasSistemas de Unidades e Análise dimensional em FísicaDiogo GonçaloAinda não há avaliações
- Mecânica Técnica: Introdução e Sistema de UnidadesDocumento23 páginasMecânica Técnica: Introdução e Sistema de UnidadesOtilio FreireAinda não há avaliações
- Projeto de tubulações: conceitos e aplicaçõesDocumento33 páginasProjeto de tubulações: conceitos e aplicaçõesProjeto QualificarAinda não há avaliações
- Fisica Aplicada A AeronauticaDocumento365 páginasFisica Aplicada A AeronauticaDaniloVilasBoasAinda não há avaliações
- As Unidades FundamentaisDocumento10 páginasAs Unidades FundamentaisLEANDRO MARTINS DA SILVAAinda não há avaliações
- Faculdade Única de Ipatinga: Prática Pedagógica Interdisciplinar:Física ExperimentalDocumento154 páginasFaculdade Única de Ipatinga: Prática Pedagógica Interdisciplinar:Física ExperimentalNain GaldsAinda não há avaliações
- Porosidade, permeabilidade e perda de pressão em CLAEDocumento6 páginasPorosidade, permeabilidade e perda de pressão em CLAEJosenildes monteiro torres100% (1)
- 1.1 Grandezas e Unidades ResumoDocumento4 páginas1.1 Grandezas e Unidades ResumoohohoAinda não há avaliações
- Apostila Treinamento Caldeiras- construçãoR1Documento36 páginasApostila Treinamento Caldeiras- construçãoR1Danielly GersonAinda não há avaliações
- Grandezas Físicas ExploradasDocumento344 páginasGrandezas Físicas ExploradasGustavo Noriyuki100% (1)
- Aulas WilsonDocumento332 páginasAulas WilsonWilson PassosAinda não há avaliações
- Medições e Sistemas de UnidadesDocumento7 páginasMedições e Sistemas de UnidadesPalhaço CacetãoAinda não há avaliações
- Física Com o Prof Girotto - 1EM - Medidas e Notação CientíficaDocumento5 páginasFísica Com o Prof Girotto - 1EM - Medidas e Notação CientíficaGirotto BritoAinda não há avaliações
- Notação de Potências de 10 e o Sistema Internacional de Unidades (SIDocumento247 páginasNotação de Potências de 10 e o Sistema Internacional de Unidades (SIKim PenicheAinda não há avaliações
- Resumo do Sistema Internacional de Unidades (SIDocumento8 páginasResumo do Sistema Internacional de Unidades (SIFelipe ReisAinda não há avaliações
- Apostila Física 1Documento40 páginasApostila Física 1MESTREJAinda não há avaliações
- Unidades básicas, suplementares e derivadasDocumento7 páginasUnidades básicas, suplementares e derivadasKayke Augusto dos Santos FerreiraAinda não há avaliações
- S.I. Unidades (Tabla)Documento3 páginasS.I. Unidades (Tabla)victor valderramaAinda não há avaliações
- Caderno de exercícios de Físico-Química (CEFQDocumento17 páginasCaderno de exercícios de Físico-Química (CEFQJosefinaXavierJosefinaXavierAinda não há avaliações
- Sistema Internacional de Unidades e outras unidades de medidaDocumento15 páginasSistema Internacional de Unidades e outras unidades de medidaBruno CunhaAinda não há avaliações
- Unidades de Medidas e VetoresDocumento7 páginasUnidades de Medidas e VetoresAdãoEdneiVieiraAinda não há avaliações
- Calendário de experimentos de Físico-Química Experimental IIDocumento36 páginasCalendário de experimentos de Físico-Química Experimental IIJuliana Soares CorrêaAinda não há avaliações
- Aula de Fundamentos de Matemática e Física - Sistemas de MedidasDocumento26 páginasAula de Fundamentos de Matemática e Física - Sistemas de Medidasantoniomandell77Ainda não há avaliações
- Unidades de Medida - SI e prefixosDocumento2 páginasUnidades de Medida - SI e prefixosRenato CandidoAinda não há avaliações
- Relatório - Exp6 - Ondas Senoidais e Curvas de Lissajous - Fenômenos Eletromagnéticos - Trim2.1Documento9 páginasRelatório - Exp6 - Ondas Senoidais e Curvas de Lissajous - Fenômenos Eletromagnéticos - Trim2.1Fernando Henrique G. ZucatelliAinda não há avaliações
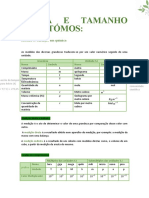
- MASSA E TAMANHO DOS ATÓMOS: MEDIÇÃO, CONSTITUIÇÃO E CÁLCULODocumento14 páginasMASSA E TAMANHO DOS ATÓMOS: MEDIÇÃO, CONSTITUIÇÃO E CÁLCULOBruna FrancoAinda não há avaliações
- Ygor ArquivoDocumento16 páginasYgor Arquivoygor.matosAinda não há avaliações
- Trabalho ElectronicaDocumento12 páginasTrabalho ElectronicaLêon Kïdh LKAinda não há avaliações
- Unidades de medida na físicaDocumento241 páginasUnidades de medida na físicaMarco AntonioAinda não há avaliações
- Analise DimensionalDocumento32 páginasAnalise DimensionalVinicius PereiraAinda não há avaliações
- Leitura e Interpretação de Projetos 1Documento33 páginasLeitura e Interpretação de Projetos 1Danielly G. JudicialAinda não há avaliações
- Sistema Internacional de UnidadesDocumento47 páginasSistema Internacional de Unidadesarianny LaiamarahAinda não há avaliações
- Roteiro 2 Pêndulo Simples e Pêndulo FísicoDocumento3 páginasRoteiro 2 Pêndulo Simples e Pêndulo FísicoJaco ChagasAinda não há avaliações
- Apostila Física FAP 1 - Tabela1 SI Unidades Básicas e DerivadasDocumento1 páginaApostila Física FAP 1 - Tabela1 SI Unidades Básicas e DerivadasFísica Concurso Vestibular100% (3)
- Conceitos básicos de Física emDocumento41 páginasConceitos básicos de Física emMarcio Luis CarlosAinda não há avaliações
- Carpitaria 03Documento33 páginasCarpitaria 03Manoel FilhoAinda não há avaliações
- Manutenção de Compressores - Apostila 2Documento33 páginasManutenção de Compressores - Apostila 2wagnerAinda não há avaliações
- Curso Online: TelhadistaDocumento33 páginasCurso Online: TelhadistaPedro CesarAinda não há avaliações
- DFo 2 4 1 Project PRDocumento2 páginasDFo 2 4 1 Project PRMatheus GarciaAinda não há avaliações
- Athon Física I PP-P1Documento1 páginaAthon Física I PP-P1Matheus GarciaAinda não há avaliações
- Apostila Googlehacking PDFDocumento5 páginasApostila Googlehacking PDFMatheus GarciaAinda não há avaliações
- DFo 2 6 Solution PR PDFDocumento3 páginasDFo 2 6 Solution PR PDFMatheus GarciaAinda não há avaliações
- DFo 2 6 Practice PRDocumento1 páginaDFo 2 6 Practice PRMatheus GarciaAinda não há avaliações
- DFo 2 4 1 Project PRDocumento2 páginasDFo 2 4 1 Project PRMatheus GarciaAinda não há avaliações