Você também pode gostar
- RB ApostilaDocumento95 páginasRB ApostilaLuiz Carlos VidalAinda não há avaliações
- 2 5 Robotica PDFDocumento31 páginas2 5 Robotica PDFMario Richard100% (1)
- Apostila Robotica Industrial Senai 2016Documento31 páginasApostila Robotica Industrial Senai 2016Junior FernandesAinda não há avaliações
- Automação Industrial e Robótica - Aula-01Documento33 páginasAutomação Industrial e Robótica - Aula-01neo-brAinda não há avaliações
- Introdução À Robótica e MecatrônicaDocumento297 páginasIntrodução À Robótica e Mecatrônicavitoriaelisa100% (1)
- Robótica MecatrônicaDocumento131 páginasRobótica MecatrônicaFrederico de CastroAinda não há avaliações
- Braço RoboticoDocumento72 páginasBraço RoboticoAlmir AndradeAinda não há avaliações
- Livro - Robótica Industrial PDFDocumento268 páginasLivro - Robótica Industrial PDFBeatriz Cristina57% (7)
- Introducao A Robotica - Apostil - SENAIDocumento132 páginasIntroducao A Robotica - Apostil - SENAIismaellutz0% (2)
- Aula 5 Industria 40Documento14 páginasAula 5 Industria 40Fabiano Jose Fernandes RodriguesAinda não há avaliações
- III AManufatura - InddDocumento38 páginasIII AManufatura - Inddfabio SantosAinda não há avaliações
- Automação Residencial - CLPDocumento53 páginasAutomação Residencial - CLPautoelisandroAinda não há avaliações
- Introducao A Robotica Apostil SENAI PDFDocumento132 páginasIntroducao A Robotica Apostil SENAI PDFcabecavilAinda não há avaliações
- DDDDDocumento29 páginasDDDDRenan TabataAinda não há avaliações
- ROMANO, Vitor Ferreira. Robótica Industrial PDFDocumento268 páginasROMANO, Vitor Ferreira. Robótica Industrial PDFJosé Eduardo Cabral100% (1)
- FILOSOFIAS DE SUPERVISÃO - GeralDocumento96 páginasFILOSOFIAS DE SUPERVISÃO - Geralrenato Sousa Mendes de QueirozAinda não há avaliações
- 00 - APOSTILA - Elementos de RoboticaDocumento36 páginas00 - APOSTILA - Elementos de RoboticaRodrigo ReisAinda não há avaliações
- Relatório Final de RobóticaDocumento12 páginasRelatório Final de RobóticaSanderson MeloAinda não há avaliações
- Robotica Teoria e Pratica ROBOTICA TEORIDocumento173 páginasRobotica Teoria e Pratica ROBOTICA TEORIRafael SantosAinda não há avaliações
- AulaAutomaoIndustrialRobtica 20161109120348 PDFDocumento108 páginasAulaAutomaoIndustrialRobtica 20161109120348 PDFLory VianaAinda não há avaliações
- Robotica 4º Ano 1º BimDocumento9 páginasRobotica 4º Ano 1º BimMauro Sergio MartinsAinda não há avaliações
- AULA 02 Robótica Renata MercanteDocumento14 páginasAULA 02 Robótica Renata MercanteMaykell D'angeloAinda não há avaliações
- Marcos Silva Tarefa2Documento14 páginasMarcos Silva Tarefa2Marcos SilvaAinda não há avaliações
- Apostila Robótica PDFDocumento34 páginasApostila Robótica PDFClaudinha CristinaAinda não há avaliações
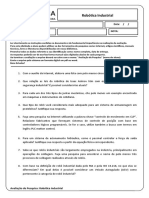
- Avaliação de PesquisaDocumento1 páginaAvaliação de PesquisaJessé Francisco do NascimentoAinda não há avaliações
- Automação e Controle Industrial - Aula 04Documento15 páginasAutomação e Controle Industrial - Aula 04renato Sousa Mendes de QueirozAinda não há avaliações
- Apostila de Robótica Educacional 2014Documento9 páginasApostila de Robótica Educacional 2014Alan PaivaAinda não há avaliações
- RobóticaDocumento6 páginasRobóticaLudmila KarinaAinda não há avaliações
- Mecatronica Facil 39 PDFDocumento37 páginasMecatronica Facil 39 PDFeloibpauloAinda não há avaliações
- Automação de Processos Industriais-Módulo 1Documento54 páginasAutomação de Processos Industriais-Módulo 1Assis JúniorAinda não há avaliações
- Ebook Isots15066 Explained PDF Free - En.ptDocumento27 páginasEbook Isots15066 Explained PDF Free - En.ptWillAinda não há avaliações
- Relatório Técnico - Mestrado Profissional: Tecnologia e Propriedade IntelectualNo EverandRelatório Técnico - Mestrado Profissional: Tecnologia e Propriedade IntelectualAinda não há avaliações
- Robotica Aula5Documento17 páginasRobotica Aula5Silvano PereiraAinda não há avaliações
- Redes IndustriaisDocumento26 páginasRedes IndustriaisGustavo Augusto100% (4)
- Implementando Um Despertador Para Android Programado No App InventorNo EverandImplementando Um Despertador Para Android Programado No App InventorAinda não há avaliações
- Evolução e A História Dos Sistemas OperacionaisDocumento16 páginasEvolução e A História Dos Sistemas OperacionaisThiago PinheiroAinda não há avaliações
- LivroDocumento26 páginasLivroKetlan PlacidoAinda não há avaliações
- 1 - Atividade - Fundamentos de Automacao e ControleDocumento1 página1 - Atividade - Fundamentos de Automacao e ControleEduarda OliveiraAinda não há avaliações
- Relatorio Carrinho AUTNOMODocumento19 páginasRelatorio Carrinho AUTNOMOjoeAinda não há avaliações
- Desenvolvendo Uma Aplicação De Pesquisa De Opinião No Android Programado No App InventorNo EverandDesenvolvendo Uma Aplicação De Pesquisa De Opinião No Android Programado No App InventorAinda não há avaliações
- Ebook Primeiros Passos Na Robótica e Automação Residencial V1Documento11 páginasEbook Primeiros Passos Na Robótica e Automação Residencial V1Bruno Ricardo0% (1)
- 4 0 Parte 5Documento7 páginas4 0 Parte 5Vinicius CaieroAinda não há avaliações
- Programando O Smartphone Para Usar Sintetizador De Voz Programado No App InventorNo EverandProgramando O Smartphone Para Usar Sintetizador De Voz Programado No App InventorAinda não há avaliações
- Apostila de RoboticaDocumento81 páginasApostila de RoboticaNando100% (3)
- O PID Fracionário: Uma Aplicação Prática e Real em Uma Planta-Piloto de Vazão IndustrialNo EverandO PID Fracionário: Uma Aplicação Prática e Real em Uma Planta-Piloto de Vazão IndustrialAinda não há avaliações
- Principios Da RoboticaDocumento20 páginasPrincipios Da RoboticaVitor RochaAinda não há avaliações
- Desenvolvendo Um Leitor De Partitura No Android Programado No App InventorNo EverandDesenvolvendo Um Leitor De Partitura No Android Programado No App InventorAinda não há avaliações
- Desenvolvendo Aplicações De Estatística Para Android No App InventorNo EverandDesenvolvendo Aplicações De Estatística Para Android No App InventorAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Radiação Uv Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Radiação Uv Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Decibelímetro Usando O Esp8266 (nodemcu) Programado Em LuaNo EverandDesenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Decibelímetro Usando O Esp8266 (nodemcu) Programado Em LuaAinda não há avaliações