Você também pode gostar
- Exercícios de Geometria - ResoluçãoDocumento6 páginasExercícios de Geometria - Resoluçãolucypurr.the.catAinda não há avaliações
- Equações ParametricasIIDocumento13 páginasEquações ParametricasIIEduardo Leopoldo Da SilvaAinda não há avaliações
- Resolução 2 Ficha 12 Ano Treino Fevereiro 2023 - Versão 2Documento3 páginasResolução 2 Ficha 12 Ano Treino Fevereiro 2023 - Versão 2Rrpso2004Ainda não há avaliações
- Exercicios Resolvidos Diagonalizaçãode Matrizes SimetricasDocumento10 páginasExercicios Resolvidos Diagonalizaçãode Matrizes Simetricasbrenda isabelAinda não há avaliações
- Equações PlanosDocumento10 páginasEquações PlanosFrancisco JuniorAinda não há avaliações
- Aula Angulos Entre Retas PDFDocumento13 páginasAula Angulos Entre Retas PDFDiego AlexandreAinda não há avaliações
- Funções trigonométricas: seno, cosseno e tangenteDocumento5 páginasFunções trigonométricas: seno, cosseno e tangenteikehrpAinda não há avaliações
- Coord Polares PDFDocumento18 páginasCoord Polares PDFIsamaira OliveiraAinda não há avaliações
- Sistema de Equações LinearesDocumento14 páginasSistema de Equações Linearesivanilson semedoAinda não há avaliações
- Exercicios de Geometria AnaliticaDocumento1 páginaExercicios de Geometria AnaliticaJaden SatoiroAinda não há avaliações
- 12.º Apont - Vetores e Valores PrópriosDocumento18 páginas12.º Apont - Vetores e Valores PrópriosAndrah SemedoAinda não há avaliações
- Capítulo 6 - Análise de Fourier - Ckt62Documento19 páginasCapítulo 6 - Análise de Fourier - Ckt62AntonioAinda não há avaliações
- Equações paramétricas de retas no espaçoDocumento61 páginasEquações paramétricas de retas no espaçooliverAinda não há avaliações
- Matemática PPT - Polígonos IDocumento13 páginasMatemática PPT - Polígonos IMatemática PPT100% (7)
- 7 at Online Fourier e Laplace - Andre - LucasDocumento3 páginas7 at Online Fourier e Laplace - Andre - LucasAndré LucasAinda não há avaliações
- Apostila de Análise Estrutural I - ArcosDocumento4 páginasApostila de Análise Estrutural I - ArcosCaykeLuisAinda não há avaliações
- Apostila Matemática Cálculo CEFET Capítulo 04 DerivadasDocumento50 páginasApostila Matemática Cálculo CEFET Capítulo 04 DerivadasMatemática Mathclassy100% (1)
- CurvSup_Aula01Documento20 páginasCurvSup_Aula01Jessica CastriciniAinda não há avaliações
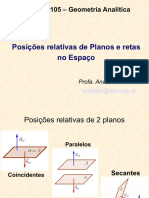
- MAT105 Posicoes Planos Retas VFDocumento22 páginasMAT105 Posicoes Planos Retas VFJamilo Dos SantosAinda não há avaliações
- Parte Apostila POLARES ERON-29-40Documento12 páginasParte Apostila POLARES ERON-29-40Paulo BotêsAinda não há avaliações
- Construindo círculos tangentes com régua e compassoDocumento9 páginasConstruindo círculos tangentes com régua e compassoEdinei ChagasAinda não há avaliações
- 1 - Lista - Espaço Tridimensional, VetoresDocumento5 páginas1 - Lista - Espaço Tridimensional, VetoresJúlia Martins Rodríguez de AzevedoAinda não há avaliações
- GA - Apostila de Coordenadas PolaresDocumento34 páginasGA - Apostila de Coordenadas PolarespecankasAinda não há avaliações
- GABARITO_PROVA_2_PGDocumento4 páginasGABARITO_PROVA_2_PGPaulo Luis SempeAinda não há avaliações
- Funções TrigonométricasDocumento17 páginasFunções TrigonométricasKyoAinda não há avaliações
- Capitulo005 Introducao Ao Estudo de SeriesDocumento13 páginasCapitulo005 Introducao Ao Estudo de SeriesAllan Sousa SoaresAinda não há avaliações
- 07 - ExSala06 - RetasDocumento2 páginas07 - ExSala06 - RetasEdson GimenezAinda não há avaliações
- 11a4Documento3 páginas11a4Ana Rita LopesAinda não há avaliações
- Aula10 Mat Transposta InversaDocumento5 páginasAula10 Mat Transposta InversaRicardo RibeiroAinda não há avaliações
- Curvas Polares e CoordenadasDocumento34 páginasCurvas Polares e CoordenadasSteven CannonAinda não há avaliações
- Valores e vectores própriosDocumento16 páginasValores e vectores própriosBruna Duarte100% (1)
- Produto Escalar e Declive de RetasDocumento1 páginaProduto Escalar e Declive de RetasFrederico MarquesAinda não há avaliações
- Trigonometria: Razões, Fórmulas e ClassificaçõesDocumento3 páginasTrigonometria: Razões, Fórmulas e ClassificaçõesFilipe MarquesAinda não há avaliações
- Trabalho 1-GAALDocumento4 páginasTrabalho 1-GAALBruno BorgesAinda não há avaliações
- Aula 21 - 2020Documento35 páginasAula 21 - 2020CarolinaDireitoAinda não há avaliações
- Al - L5 - SolDocumento5 páginasAl - L5 - SolSeza SuritaAinda não há avaliações
- Prova 2 2019 1Documento4 páginasProva 2 2019 1Katherine FockAinda não há avaliações
- Lista Autovalores Autovetores GabaritoDocumento5 páginasLista Autovalores Autovetores GabaritoEduardoRaphaelAinda não há avaliações
- Lista 6 de CF368 - Eletromagnetismo IDocumento5 páginasLista 6 de CF368 - Eletromagnetismo ISthefanie Monica100% (1)
- Polares 13Documento18 páginasPolares 13Eduardo DelfinoAinda não há avaliações
- Exemplo Lei de GaussDocumento2 páginasExemplo Lei de GaussMarcos PaizanteAinda não há avaliações
- Equações de Retas e Planos no EspaçoDocumento19 páginasEquações de Retas e Planos no Espaçojoao pauloAinda não há avaliações
- Microsoft Word ELM ER 07 Cap7 PDFDocumento19 páginasMicrosoft Word ELM ER 07 Cap7 PDFicaroAinda não há avaliações
- Exame Resolvido - UEM 2005 - Questões 1-10Documento8 páginasExame Resolvido - UEM 2005 - Questões 1-10ADERITOAinda não há avaliações
- EA 12 10ºanoDocumento3 páginasEA 12 10ºanosandraspaulo1674Ainda não há avaliações
- ExameNormal CorrecçãoDocumento7 páginasExameNormal CorrecçãoAbrão AntónioAinda não há avaliações
- Potências, radicais e notação científica emDocumento7 páginasPotências, radicais e notação científica emAna Catarina Sousa Silva GomesAinda não há avaliações
- Expoente 12 - Prova-Modelo de Exame - ResolucaoDocumento11 páginasExpoente 12 - Prova-Modelo de Exame - ResolucaoNicola CortesaoAinda não há avaliações
- Atividade EDA2 Equações Diferenciais Aplicadas II - Serie de FourierDocumento9 páginasAtividade EDA2 Equações Diferenciais Aplicadas II - Serie de FourierCarla MeloAinda não há avaliações
- 1-RetasPlanos EquacoesDocumento80 páginas1-RetasPlanos EquacoesGustavo BenAinda não há avaliações
- Matemática 10º Ano - Resumos e Exercicios - DR Eduardo OliveiraDocumento15 páginasMatemática 10º Ano - Resumos e Exercicios - DR Eduardo OliveiraTioed Oliveira100% (2)
- Diagonalização de matrizesDocumento13 páginasDiagonalização de matrizesJanderson Barbeito da SilvaAinda não há avaliações
- 2022 - Lista3 GabaritoDocumento6 páginas2022 - Lista3 Gabaritoeric.kinoshitaAinda não há avaliações
- IntSup PDFDocumento45 páginasIntSup PDFjoeAinda não há avaliações
- Equações de Retas e PlanosDocumento15 páginasEquações de Retas e PlanosRUHAN PONCEAinda não há avaliações
- Lista 1 Da Unidade 1Documento4 páginasLista 1 Da Unidade 1Israel FelixAinda não há avaliações
- Correção Do Exame de Matemática ADocumento9 páginasCorreção Do Exame de Matemática AamandaAinda não há avaliações
- Livro Possibilidades e Desafios Da EducaçãoDocumento152 páginasLivro Possibilidades e Desafios Da EducaçãoEllen SantosAinda não há avaliações
- PROGRAMA EDUCATIVO PARA ALUNO COM DIFICULDADESDocumento30 páginasPROGRAMA EDUCATIVO PARA ALUNO COM DIFICULDADESBerta Pereira Costa100% (1)
- Exercicio PythonDocumento17 páginasExercicio PythonfredsoncbrlAinda não há avaliações
- Laboratório de Mecânica & Física introduz conceitos-chaveDocumento45 páginasLaboratório de Mecânica & Física introduz conceitos-chaveJacinto Faustino100% (1)
- Lista Teste 1Documento4 páginasLista Teste 1Luh BatistaAinda não há avaliações
- Lista de Exercícios de ProbabilidadeDocumento4 páginasLista de Exercícios de ProbabilidadeGabriel RibeiroAinda não há avaliações
- Modelos dinâmicos discretosDocumento3 páginasModelos dinâmicos discretosCamila Yumi YachiroAinda não há avaliações
- Cálculo de ProbabilidadesDocumento4 páginasCálculo de ProbabilidadesRaimundoAinda não há avaliações
- Prova de Matemática do Colégio Militar de Belo HorizonteDocumento12 páginasProva de Matemática do Colégio Militar de Belo HorizonteGuilherme de OliveiraAinda não há avaliações
- Apostila Tre Ba Raciociniologico EdgarDocumento62 páginasApostila Tre Ba Raciociniologico EdgarElisangela Lima100% (1)
- Ficha Global 5 - Enunciado PDFDocumento4 páginasFicha Global 5 - Enunciado PDFMJTAinda não há avaliações
- Teoria e Fundamentos Da ComputaçãoDocumento118 páginasTeoria e Fundamentos Da ComputaçãoHugo RochaAinda não há avaliações
- Mef 1Documento28 páginasMef 1Maria Cecilia Pontes SilvaAinda não há avaliações
- Códigos corretores de errosDocumento53 páginasCódigos corretores de errosSézani CarvalhoAinda não há avaliações
- Exemplos - Aula.8 - Paulo TeixieraDocumento65 páginasExemplos - Aula.8 - Paulo TeixieraPaulo Dã Nascimento TeixeiraAinda não há avaliações
- O Auxílio Da Modelagem Matemática À MedicinaDocumento3 páginasO Auxílio Da Modelagem Matemática À MedicinaSECRETORAinda não há avaliações
- A Lei que Governa Todos os SistemasDocumento140 páginasA Lei que Governa Todos os Sistemassoraya koberAinda não há avaliações
- Desenho dos diagramas de BodeDocumento20 páginasDesenho dos diagramas de BodeANA ELEIDY DA SILVA BELOTIAinda não há avaliações
- Trigonometria - Lista de ProblemasDocumento13 páginasTrigonometria - Lista de ProblemasfsfhtduAinda não há avaliações
- Prova Resolvida - TRT - 4 Região - RS - 2011 - FCCDocumento5 páginasProva Resolvida - TRT - 4 Região - RS - 2011 - FCCrenanbitencourt2010Ainda não há avaliações
- 11.8 Series de PotenciaDocumento12 páginas11.8 Series de Potenciafabiorj88Ainda não há avaliações
- Medição e unidades de medida no Sistema InternacionalDocumento38 páginasMedição e unidades de medida no Sistema InternacionalHeverton DiasAinda não há avaliações
- Matemática desafio 9o anoDocumento14 páginasMatemática desafio 9o anoOtavio NetoAinda não há avaliações
- C - COELHO, (2002) - Krause, Introdução Aos Fundamentos Axiomáticos Da Ciência (Resenha) (Olhar)Documento5 páginasC - COELHO, (2002) - Krause, Introdução Aos Fundamentos Axiomáticos Da Ciência (Resenha) (Olhar)Rodrigo CésarAinda não há avaliações
- Matemática - Exercícios Resolvidos - Contagem ProbabilidadeDocumento8 páginasMatemática - Exercícios Resolvidos - Contagem ProbabilidadeMatemática Mathclassy100% (17)
- Planejamento e Gerenciamento Do TransitoDocumento114 páginasPlanejamento e Gerenciamento Do TransitoAdalberto PagiolliAinda não há avaliações
- Química Analítica Quantitativa: Métodos, Erros e Tratamento de DadosDocumento124 páginasQuímica Analítica Quantitativa: Métodos, Erros e Tratamento de DadosJuliano CordeiroAinda não há avaliações
- Aula 14 RLM TRF Risco Exponencial v1Documento27 páginasAula 14 RLM TRF Risco Exponencial v1DAMIÃO WELLINGTON100% (1)
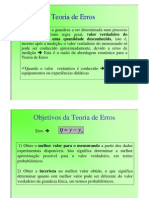
- Aula Teoria de ErrosDocumento22 páginasAula Teoria de ErrosDacabaca DucubucuAinda não há avaliações
- Consumo automóvel gráfico velocidadeDocumento6 páginasConsumo automóvel gráfico velocidadeGilsonSouzaAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.No EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Nota: 5 de 5 estrelas5/5 (1)
- Indicadores Matemáticos Para Apostas Em FutebolNo EverandIndicadores Matemáticos Para Apostas Em FutebolAinda não há avaliações