Você também pode gostar
- GA Apostila de Coordenadas Polares PDFDocumento34 páginasGA Apostila de Coordenadas Polares PDFSteven CannonAinda não há avaliações
- CALCULO III TEXTO INTEGRAL DUPLA (Em Coordenadas Polares) PDFDocumento12 páginasCALCULO III TEXTO INTEGRAL DUPLA (Em Coordenadas Polares) PDFCaio Felipe CarvalhoAinda não há avaliações
- Coord Polares PDFDocumento18 páginasCoord Polares PDFIsamaira OliveiraAinda não há avaliações
- Curvas Planas em Coordenadas Polares: SumárioDocumento23 páginasCurvas Planas em Coordenadas Polares: SumárioMisael Albuquerque LiraAinda não há avaliações
- Texto 03 Integral Dupla em Coordenadas PolaresDocumento10 páginasTexto 03 Integral Dupla em Coordenadas PolaresbarbararodleiAinda não há avaliações
- GA - Apostila de Coordenadas PolaresDocumento34 páginasGA - Apostila de Coordenadas PolarespecankasAinda não há avaliações
- Coordenadas PolaresDocumento8 páginasCoordenadas PolaresLeonardo RamosAinda não há avaliações
- Coordenadas PolaresDocumento18 páginasCoordenadas PolaresLumaTelesAinda não há avaliações
- PolaresDocumento9 páginasPolaresjuliaocbvAinda não há avaliações
- Apostila Coordenadas Polares-Alunos PDFDocumento43 páginasApostila Coordenadas Polares-Alunos PDFMatheus Ferri0% (1)
- Polares 13Documento18 páginasPolares 13Eduardo DelfinoAinda não há avaliações
- TeoricoDocumento24 páginasTeoricoCowboyAinda não há avaliações
- Aula 32 - C Lculo 2Documento10 páginasAula 32 - C Lculo 2Adriano MoschiniAinda não há avaliações
- Coordenadas PolaresDocumento9 páginasCoordenadas PolaresDusty MurphyAinda não há avaliações
- Área em Coordenadas PolaresDocumento17 páginasÁrea em Coordenadas PolaresCarlos MagnoAinda não há avaliações
- 3º Teorico - Coordenadas PolaresDocumento26 páginas3º Teorico - Coordenadas PolaresJoão Junio NascimentoAinda não há avaliações
- 0 AM2 Part1Documento25 páginas0 AM2 Part1RafaelaMateusAinda não há avaliações
- q6 Coord Polar PDFDocumento18 páginasq6 Coord Polar PDFDoroteia12Ainda não há avaliações
- Coordenadas PolaresDocumento6 páginasCoordenadas PolaresDanielaAinda não há avaliações
- Coordenadas PolaresDocumento5 páginasCoordenadas PolareshnpereiraAinda não há avaliações
- Gabarito Prova 2 PGDocumento4 páginasGabarito Prova 2 PGPaulo Luis SempeAinda não há avaliações
- Notas de Aula Calculo 3Documento6 páginasNotas de Aula Calculo 3Skibid toiletAinda não há avaliações
- Areas em Coordenadas PolaresDocumento5 páginasAreas em Coordenadas PolaresTonny AntonyAinda não há avaliações
- Aula 5 - Coordenadas PolaresDocumento24 páginasAula 5 - Coordenadas PolaresThiago SilvaAinda não há avaliações
- Grupo Isometrias GeometriaEuclidianaDocumento4 páginasGrupo Isometrias GeometriaEuclidianamarlon mathAinda não há avaliações
- GA A Resumo 11 Coordenadas Polares e CilíndricasDocumento3 páginasGA A Resumo 11 Coordenadas Polares e CilíndricasNilson PimentelAinda não há avaliações
- 7 CP CPP CerDocumento18 páginas7 CP CPP CerMaria SilvaAinda não há avaliações
- Geometria Analítica: Cristiane Da SilvaDocumento19 páginasGeometria Analítica: Cristiane Da SilvaEduardo SantosAinda não há avaliações
- Relatório Final-Artur Jorge Marinho - (IC)Documento15 páginasRelatório Final-Artur Jorge Marinho - (IC)Artur JorgeAinda não há avaliações
- Coordenadas Polares - CônicasDocumento17 páginasCoordenadas Polares - CônicasRil SilvaAinda não há avaliações
- 349506-Coordenadas PolaresDocumento6 páginas349506-Coordenadas PolaresAlef BehlingAinda não há avaliações
- Trigonometria Na CircunferênciaDocumento7 páginasTrigonometria Na Circunferênciasidney_lanesAinda não há avaliações
- Ponto Reta Plano 2Documento5 páginasPonto Reta Plano 2Nonato LopesAinda não há avaliações
- Matemática - Rumoaoita - Artigoconicascap3Documento9 páginasMatemática - Rumoaoita - Artigoconicascap3Geometria Ensino MédioAinda não há avaliações
- Cálculo Ii - Novo: Ifsul - Câmpus PelotasDocumento38 páginasCálculo Ii - Novo: Ifsul - Câmpus PelotassylviocoelhoAinda não há avaliações
- Aula 21Documento5 páginasAula 21Felipe CruzAinda não há avaliações
- Equações Da Reta No Plano: SumárioDocumento29 páginasEquações Da Reta No Plano: SumárioRaphael Martinez EleuterioAinda não há avaliações
- PantografoDocumento7 páginasPantografoJefferson T. Girao100% (1)
- Curso - Coordenadas Polares - Conteúdo (Apostila)Documento7 páginasCurso - Coordenadas Polares - Conteúdo (Apostila)Samantha CarlaAinda não há avaliações
- Coordenadas Polares PDFDocumento12 páginasCoordenadas Polares PDFLuis AnjosAinda não há avaliações
- Sistema de Coordenadas Polares Com Exercios Resolvidos Calculo ADocumento21 páginasSistema de Coordenadas Polares Com Exercios Resolvidos Calculo AClaudio Pereira50% (2)
- Posição Relativa Entre Retas e Círculos e Distâncias: SumárioDocumento17 páginasPosição Relativa Entre Retas e Círculos e Distâncias: SumárioMisael Albuquerque LiraAinda não há avaliações
- Planos RetasDocumento34 páginasPlanos Retasjorge LuisAinda não há avaliações
- PDF 2c2ba Ano Aula 5 Trigonometria Na CircunferenciaDocumento18 páginasPDF 2c2ba Ano Aula 5 Trigonometria Na CircunferenciaCristiano MarquesAinda não há avaliações
- Cap 10.6Documento5 páginasCap 10.6Igor MillisAinda não há avaliações
- Mata01 2023 2Documento14 páginasMata01 2023 2rafael92527Ainda não há avaliações
- Ficha 5 - Apoio 11Documento2 páginasFicha 5 - Apoio 11Catarina JesusAinda não há avaliações
- Equivalentes 5 PostuladoDocumento10 páginasEquivalentes 5 PostuladoFernando FilhoAinda não há avaliações
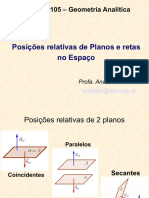
- MAT105 Posicoes Planos Retas VFDocumento22 páginasMAT105 Posicoes Planos Retas VFJamilo Dos SantosAinda não há avaliações
- Equações ParametricasIIDocumento13 páginasEquações ParametricasIIEduardo Leopoldo Da SilvaAinda não há avaliações
- Aula 7 - Áreas e Comprimentos em Coordenadas PolaresDocumento28 páginasAula 7 - Áreas e Comprimentos em Coordenadas PolaresThiago SilvaAinda não há avaliações
- Resumo Coordenadas PolaresDocumento4 páginasResumo Coordenadas PolaresJoao Raimundo FerreiraAinda não há avaliações
- Apostila GACV Cap10-13Documento65 páginasApostila GACV Cap10-13Gabriel medinaAinda não há avaliações
- Apostila Coordenadas Polares Cilindricas EsfericasDocumento10 páginasApostila Coordenadas Polares Cilindricas Esfericashfthtj cgjfjxAinda não há avaliações
- Apost2 6Documento8 páginasApost2 6Helena BatistaAinda não há avaliações
- TP6 SolDocumento12 páginasTP6 SolAna Carina CostaAinda não há avaliações
- Ma092 34 Ga Proj Dist A RetaDocumento17 páginasMa092 34 Ga Proj Dist A RetaNelson DomingosAinda não há avaliações
- 014 Areas Medidas de Superficies Parte IVDocumento10 páginas014 Areas Medidas de Superficies Parte IVJeremias SouzaAinda não há avaliações
- 10 CineticaDocumento2 páginas10 CineticaPaulo BotêsAinda não há avaliações
- Propriedades ColigativasDocumento2 páginasPropriedades ColigativasCecília MeloAinda não há avaliações
- Reacoes OrganicasDocumento6 páginasReacoes Organicassbjabxjhsac100% (1)
- 10 - Resumo - HidrocarbonetosDocumento2 páginas10 - Resumo - HidrocarbonetosCaio GóesAinda não há avaliações
- 15 - Análise DimensionalDocumento2 páginas15 - Análise DimensionalGabriel BorgesAinda não há avaliações
- Circuito de Corrente Alternada MISTODocumento9 páginasCircuito de Corrente Alternada MISTOSamuel SouzaAinda não há avaliações
- Manual Manutenção MW-80H R07Documento63 páginasManual Manutenção MW-80H R07Daniel BAinda não há avaliações
- 04 Aula Equipamentos Da Sala de ExamesDocumento40 páginas04 Aula Equipamentos Da Sala de ExamesJhones JnsAinda não há avaliações
- Recristalizaçao e Determinaçao Do Ponto de FusaoDocumento9 páginasRecristalizaçao e Determinaçao Do Ponto de FusaoJessy santosAinda não há avaliações
- MetalografiaDocumento51 páginasMetalografiaAntonioCarlosSilvaAinda não há avaliações
- 04 Apostila - Eletrogate - Kit - Arduino - BeginningDocumento25 páginas04 Apostila - Eletrogate - Kit - Arduino - BeginningEldglay da Silva DomingosAinda não há avaliações
- Análise Do Projeto de Separadores de Arraste Externos À Cozedores A Vácuo em Usinas SucroalcooleirasDocumento80 páginasAnálise Do Projeto de Separadores de Arraste Externos À Cozedores A Vácuo em Usinas SucroalcooleirasagsbuenoAinda não há avaliações
- MNFIOU2EDocumento13 páginasMNFIOU2ERicardo CamargosAinda não há avaliações
- Conexão Lemúria - Terra CristalDocumento3 páginasConexão Lemúria - Terra CristalSerGioJúniorAinda não há avaliações
- Manual Nr12Documento26 páginasManual Nr12Giuliano ArzamendiaAinda não há avaliações
- Cópia de AULA 04 1ANODocumento2 páginasCópia de AULA 04 1ANOKaua SouzaAinda não há avaliações
- Noções de Referencial e MU PROENEMDocumento7 páginasNoções de Referencial e MU PROENEMThays BrandãoAinda não há avaliações
- Cálculo de Andaimes Segundo UNE em 12810Documento10 páginasCálculo de Andaimes Segundo UNE em 12810kleissonAinda não há avaliações
- QuimioinformaticaDocumento55 páginasQuimioinformaticaRicardo "JAWJAW" StefaniAinda não há avaliações
- ATV12-Ajustes Iniciais de Fabrica e Diagrama Basico de ligacao-BR-11JAN10Documento1 páginaATV12-Ajustes Iniciais de Fabrica e Diagrama Basico de ligacao-BR-11JAN10Marcos Paulo Lima MaiaAinda não há avaliações
- Ava 01Documento2 páginasAva 01Dang_dAinda não há avaliações
- Resumo O Universo e A Origem Da Vida Na Visão Dos Filósofos Pré-SocráticosDocumento3 páginasResumo O Universo e A Origem Da Vida Na Visão Dos Filósofos Pré-Socráticosguilhermesousamachado25Ainda não há avaliações
- Novos Programas Ssa2 2023Documento24 páginasNovos Programas Ssa2 2023Yasmin AraújoAinda não há avaliações
- Plano de Lavra e de Negocios RetificadoDocumento38 páginasPlano de Lavra e de Negocios RetificadoDavid PedroAinda não há avaliações
- Aula 59 - Playlist de Análise Combinatória e ProbabilidadeDocumento1 páginaAula 59 - Playlist de Análise Combinatória e ProbabilidadeMatheus Vieira de OliveiraAinda não há avaliações
- A.L.1.1-Plano InclinadoDocumento21 páginasA.L.1.1-Plano InclinadoAluno Ana Carolina Silva CabralAinda não há avaliações
- TITAC2022B - 4.3 Métodos de AplicaçãoDocumento8 páginasTITAC2022B - 4.3 Métodos de AplicaçãoBruno GavaAinda não há avaliações
- Movimento Retilíneo - Lista de ExercciosDocumento2 páginasMovimento Retilíneo - Lista de ExercciosBRUNA ARAUJO CARDOSOAinda não há avaliações
- LINDA WAWITA - FlautaDocumento1 páginaLINDA WAWITA - FlautagabinoAinda não há avaliações
- Hce300 Landstar - Guia5 - LocaçãoDocumento14 páginasHce300 Landstar - Guia5 - LocaçãoMadruguinha GonzagaAinda não há avaliações
- LISTA 23 Cap 7 Trabalho de Força VariávelDocumento2 páginasLISTA 23 Cap 7 Trabalho de Força VariávelMaria Eduarda Enriconi100% (1)
- Aula 01 - FUNDAMENTOS DE BIOQUÍMICA OkDocumento73 páginasAula 01 - FUNDAMENTOS DE BIOQUÍMICA OkSara CasteloAinda não há avaliações
- SupercondutoresDocumento8 páginasSupercondutoresCoelhoAinda não há avaliações
- 191 Manual TrunnyDocumento52 páginas191 Manual TrunnyDeyvid Lins de FreitasAinda não há avaliações
- JCB+JS200,+JS210,+JS220,+JS240,+JS260+Service+Repair+Manual (330-412) en PTDocumento83 páginasJCB+JS200,+JS210,+JS220,+JS240,+JS260+Service+Repair+Manual (330-412) en PTRaphael De Almeida Gomes100% (1)