Você também pode gostar
- Cartilha SENARDocumento84 páginasCartilha SENARBruno CarlosAinda não há avaliações
- Apostila DroneDocumento27 páginasApostila DroneFabiano Alves654p vgyy77Ainda não há avaliações
- Drones e Ciencia Prudkin & Breunig 2019Documento126 páginasDrones e Ciencia Prudkin & Breunig 2019Marcos PalaciosAinda não há avaliações
- Uso de Vant Na AgriculturaDocumento11 páginasUso de Vant Na AgriculturaMaycon VieiraAinda não há avaliações
- Ebook Aerofotogrametria Com Drones HorusDocumento25 páginasEbook Aerofotogrametria Com Drones HorusShaier DornelesAinda não há avaliações
- Ebook Topografia Com Drones para Iniciantes PDFDocumento19 páginasEbook Topografia Com Drones para Iniciantes PDFJoão Paulo Lima100% (3)
- Apostila Curso de Drone V3.0Documento91 páginasApostila Curso de Drone V3.0Principe OicramAinda não há avaliações
- TCC DronesDocumento50 páginasTCC DronesCarlos Henrique Araújo Norte100% (1)
- Procedimentos Legais para Habilitação de DronesDocumento14 páginasProcedimentos Legais para Habilitação de DronesErick TolentinoAinda não há avaliações
- RG DRONES Brochura ACADEMIADocumento28 páginasRG DRONES Brochura ACADEMIAAdriano CHAVES DE FRANÇAAinda não há avaliações
- Historia Da FotoGraMeTriaDocumento35 páginasHistoria Da FotoGraMeTriaRodryAinda não há avaliações
- Resolução Espectral Na Utilização de Drones?Documento10 páginasResolução Espectral Na Utilização de Drones?Adenilson GiovaniniAinda não há avaliações
- FotogrametriaDocumento21 páginasFotogrametriaHewerton Alves da Silva100% (1)
- Ebook - o Guia Definitivo Sobre Pontos de ApoioDocumento23 páginasEbook - o Guia Definitivo Sobre Pontos de ApoioFranco BaldiAinda não há avaliações
- Publicacao - DRONES 20161130 20012017 WebDocumento92 páginasPublicacao - DRONES 20161130 20012017 WebALEXANDRE JOSE FIGUEIREDO LOUREIRO100% (2)
- TRABALHO TOPOGRAFIA - Levantamento TopograficoDocumento9 páginasTRABALHO TOPOGRAFIA - Levantamento Topograficohermilio saiaAinda não há avaliações
- Curso de Drone - QuantumDocumento5 páginasCurso de Drone - QuantumEdmilson Lima Júnior100% (1)
- DRONES - Guia Básico para Mapeamento Aéreo - WEBDocumento61 páginasDRONES - Guia Básico para Mapeamento Aéreo - WEBRobson SantosAinda não há avaliações
- Como Importar Imagem Raster No AutoCAD Civil 3DDocumento5 páginasComo Importar Imagem Raster No AutoCAD Civil 3DEfraim Fernandes FernandesAinda não há avaliações
- Ebook - Drones Na AgriculturaDocumento26 páginasEbook - Drones Na AgriculturaRudimar PetterAinda não há avaliações
- Curso Drone Na AgriculturaDocumento470 páginasCurso Drone Na AgriculturaEngenharia Elétrica100% (2)
- Ortofotocarta, Cartas e Plantas Oriundas Do Mapeamento Com DroneDocumento12 páginasOrtofotocarta, Cartas e Plantas Oriundas Do Mapeamento Com DroneAdenilson GiovaniniAinda não há avaliações
- Levantamento Aerofotogramétrico: o Guia Definitivo Sobre o Assunto!Documento20 páginasLevantamento Aerofotogramétrico: o Guia Definitivo Sobre o Assunto!Adenilson GiovaniniAinda não há avaliações
- Ebook Aerofotogrametria Com Drones HorusDocumento22 páginasEbook Aerofotogrametria Com Drones Horussaviodebrito100% (1)
- Drones e direitos de personalidade: delimitações contemporâneas da ilicitudeNo EverandDrones e direitos de personalidade: delimitações contemporâneas da ilicitudeAinda não há avaliações
- Py Qgis 1Documento72 páginasPy Qgis 1Miguel HenleyAinda não há avaliações
- Apostila Curso Pilotagem DroneDocumento16 páginasApostila Curso Pilotagem DroneFernando TuraniAinda não há avaliações
- Georreferenciamento de Imóveis RuraisDocumento217 páginasGeorreferenciamento de Imóveis RuraisThiago Laurindo 2Ainda não há avaliações
- 6 GNSSDocumento47 páginas6 GNSSJeiel FrancisAinda não há avaliações
- Câmera para Drone: Conheça Os 3 Principais Tipos ExistentesDocumento11 páginasCâmera para Drone: Conheça Os 3 Principais Tipos ExistentesAdenilson GiovaniniAinda não há avaliações
- Apostila Qgis para Analise EspacialDocumento98 páginasApostila Qgis para Analise EspacialCarolina Costa100% (1)
- Geração De Mapas Digitais Com O GoogleNo EverandGeração De Mapas Digitais Com O GoogleAinda não há avaliações
- Topografia Com Drones: Conheça As 7 EtapasDocumento11 páginasTopografia Com Drones: Conheça As 7 EtapasAdenilson GiovaniniAinda não há avaliações
- Aplicação Do Drone Na Engenharia de Agrimensura e para o Georreferenciamento de Imóveis Rurais Abordagem Histórico Legal No BrasilDocumento41 páginasAplicação Do Drone Na Engenharia de Agrimensura e para o Georreferenciamento de Imóveis Rurais Abordagem Histórico Legal No BrasilrufuelAinda não há avaliações
- Aula 10 FotogrametriaDocumento79 páginasAula 10 FotogrametriaDelilah Magalhaes0% (1)
- TCC Drones e TerraplenagemDocumento12 páginasTCC Drones e TerraplenagemDavid BergensAinda não há avaliações
- Apostila Topografia UFRGSDocumento151 páginasApostila Topografia UFRGSEduardo SilveiraAinda não há avaliações
- Manual Operacional de Drones CGUDocumento29 páginasManual Operacional de Drones CGUPrincipe OicramAinda não há avaliações
- Manual ENVIDocumento306 páginasManual ENVIdclealalvesAinda não há avaliações
- Checklist Pre-VôoDocumento2 páginasChecklist Pre-Vôomarlon santosAinda não há avaliações
- E-Book - Mapeamento Aereo Com DronesDocumento41 páginasE-Book - Mapeamento Aereo Com DronesCamila MB100% (1)
- Software ErdasDocumento22 páginasSoftware ErdasIgor GonçalvesAinda não há avaliações
- Apostila Desenho Tecnico II - Parte 2Documento39 páginasApostila Desenho Tecnico II - Parte 2plgcadAinda não há avaliações
- Mapeamento Com Drones Prof Rafael Calderon 2020 1 PDFDocumento47 páginasMapeamento Com Drones Prof Rafael Calderon 2020 1 PDFcleytonricardoAinda não há avaliações
- Deteção RemotaDocumento22 páginasDeteção RemotaPauloAinda não há avaliações
- Geoprocessamento em ArcgisDocumento77 páginasGeoprocessamento em ArcgisRicardo SousaAinda não há avaliações
- Curso Civil 3D-SurveyDocumento17 páginasCurso Civil 3D-SurveyJose Jaramillo MoscosoAinda não há avaliações
- Praticas Idrisi TaigaDocumento57 páginasPraticas Idrisi TaigaCaio Dafico100% (1)
- Topografia Aplicada Ao GeorreferenciamentoDocumento94 páginasTopografia Aplicada Ao GeorreferenciamentoPedro AraújoAinda não há avaliações
- SIRGAS 2000: o Que É, Qual Sua História, Objetivos e o Estado Da ArteDocumento15 páginasSIRGAS 2000: o Que É, Qual Sua História, Objetivos e o Estado Da ArteAdenilson GiovaniniAinda não há avaliações
- Ebook Guia Pratico HorusDocumento24 páginasEbook Guia Pratico HorusRicardo Vilar Neves100% (1)
- Guia Do ENVI e TeledeteccionDocumento317 páginasGuia Do ENVI e Teledetecciongeoespacialgis100% (2)
- Normas Técnicas de Produção CartografiaDGT PDFDocumento86 páginasNormas Técnicas de Produção CartografiaDGT PDFJose Fernando Carvalho100% (1)
- Fotogrametria e Fotointerpretação 1Documento39 páginasFotogrametria e Fotointerpretação 1Anderson NascimentoAinda não há avaliações
- Aposilta Sensoriamento Remoto InpeDocumento34 páginasAposilta Sensoriamento Remoto InpePedro NetoAinda não há avaliações
- Apostila Topografia I 2014Documento79 páginasApostila Topografia I 2014Daniel OcAinda não há avaliações
- CURSO SWAT 2019 - PontalDocumento60 páginasCURSO SWAT 2019 - PontalHector HarrisAinda não há avaliações
- Protocolo Estrutura e Diversidade Da VegetaçãoDocumento9 páginasProtocolo Estrutura e Diversidade Da VegetaçãoDennis Panayotis Ostrensky SaridakisAinda não há avaliações
- Coleta de HerpetofaunaDocumento4 páginasColeta de HerpetofaunaDennis Panayotis Ostrensky SaridakisAinda não há avaliações
- Plantas Ornamentais - Rizzini PDFDocumento73 páginasPlantas Ornamentais - Rizzini PDFDennis Panayotis Ostrensky Saridakis100% (1)
- Do A EscalarDocumento30 páginasDo A EscalarJean QuadrosAinda não há avaliações
- Sobrevivencia Na SelvaDocumento113 páginasSobrevivencia Na Selvaangelomella01100% (1)
- Valoração Econômica Da Biodiversidade No BrasilDocumento18 páginasValoração Econômica Da Biodiversidade No BrasilDennis Panayotis Ostrensky SaridakisAinda não há avaliações
- Indicadores de Sustentabilidade e GovernançaDocumento68 páginasIndicadores de Sustentabilidade e GovernançaDennis Panayotis Ostrensky SaridakisAinda não há avaliações
- A Valoração Ambiental Como Ferramenta de Gestão em UCsDocumento15 páginasA Valoração Ambiental Como Ferramenta de Gestão em UCsDennis Panayotis Ostrensky SaridakisAinda não há avaliações
- Apostila Detetive Particular 001Documento76 páginasApostila Detetive Particular 001Jhonny Wesker50% (2)
- DISSERTAÇAO Rafael Machado Do LivramentoDocumento143 páginasDISSERTAÇAO Rafael Machado Do LivramentoRafael MachadoAinda não há avaliações
- Questões - Música Na EducaçãoDocumento7 páginasQuestões - Música Na EducaçãoSalatiel NunesAinda não há avaliações
- Cap4 - Agitação e Mistura - 15 - 1 PDFDocumento53 páginasCap4 - Agitação e Mistura - 15 - 1 PDFarilson100% (1)
- SFM 2014 Aula 22Documento20 páginasSFM 2014 Aula 22Lucas SantosAinda não há avaliações
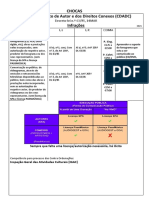
- Chocas Direito de AutorDocumento3 páginasChocas Direito de AutorAthomikAinda não há avaliações
- Manheim PrincipiosASTDocumento10 páginasManheim PrincipiosASTPriscila QuintelaAinda não há avaliações
- Florais RP CompletoDocumento24 páginasFlorais RP CompletoCleo SilvaAinda não há avaliações
- Ai FGV CronogramaDocumento16 páginasAi FGV Cronogramafabar200075% (8)
- RGPS - Características e Regras Gerais PDFDocumento162 páginasRGPS - Características e Regras Gerais PDFLaryssa RodriguesAinda não há avaliações
- Modelo Portfolio UnoparDocumento8 páginasModelo Portfolio UnoparJosé Aron100% (3)
- BÁSICO - Mód I - 1 AULA - O Processo de Criação Do Universo PDFDocumento4 páginasBÁSICO - Mód I - 1 AULA - O Processo de Criação Do Universo PDFRenan Ezra GP100% (1)
- Fichamento Ideologia Alemã - MarxDocumento22 páginasFichamento Ideologia Alemã - MarxDenner DantasAinda não há avaliações
- Física 23 - Princípios Da Eletricidade e Lei de CoulombDocumento7 páginasFísica 23 - Princípios Da Eletricidade e Lei de CoulombPaulo VieiraAinda não há avaliações
- j684 Unitrol 6000 Medium PTDocumento2 páginasj684 Unitrol 6000 Medium PTJulio ReisAinda não há avaliações
- Metodologia Do Trabalho CientíficoDocumento4 páginasMetodologia Do Trabalho CientíficoLucas CostaAinda não há avaliações
- 1 P.D - 2014 (Mat. 9º Ano) - Blog Do Prof. WarlesDocumento2 páginas1 P.D - 2014 (Mat. 9º Ano) - Blog Do Prof. WarlesNara Roberta AndradeAinda não há avaliações
- Resenha América IDocumento6 páginasResenha América Ilázaro_rufino_1Ainda não há avaliações
- Fabricantes Homologados PDFDocumento12 páginasFabricantes Homologados PDFEdinaldo MouraAinda não há avaliações
- Sistema de Gestao Ambiental (ISO 14001)Documento14 páginasSistema de Gestao Ambiental (ISO 14001)Wanderson MouraAinda não há avaliações
- Acustica e Introducao A OpticaDocumento3 páginasAcustica e Introducao A OpticaMaria Beatriz EstevamAinda não há avaliações
- Fluxograma Processo Açucar AlcoolDocumento1 páginaFluxograma Processo Açucar AlcoolRodrigo Ramos LottiAinda não há avaliações
- Descritivo Com Fazer Cerveja Com Kit Extrato e GraosDocumento8 páginasDescritivo Com Fazer Cerveja Com Kit Extrato e GraosKati RodriguesAinda não há avaliações
- U1 Aula8 Escalas CartograficasDocumento10 páginasU1 Aula8 Escalas CartograficasIgor Amaral PessoaAinda não há avaliações
- Manual Do Estudante Abepro e Abepro Jovem Edia A o 2014 1 PDFDocumento51 páginasManual Do Estudante Abepro e Abepro Jovem Edia A o 2014 1 PDFElsin SilvaAinda não há avaliações
- A Luuanda de José Luandino VieiraDocumento17 páginasA Luuanda de José Luandino Vieirataniacmacedo100% (1)
- Transtorno de Déficit de Atenção Com Hiperatividade: Medicalização, Classificação e Controle Dos DesviosDocumento90 páginasTranstorno de Déficit de Atenção Com Hiperatividade: Medicalização, Classificação e Controle Dos DesviosSara AlbuquerqueAinda não há avaliações
- Roteiro de Entrevista - Modelo IntentusDocumento2 páginasRoteiro de Entrevista - Modelo IntentusPaloma SantosAinda não há avaliações
- Conners ProfessoresDocumento1 páginaConners Professoressuzana lucas100% (1)
- Aula I Redação Esa - ParticularDocumento4 páginasAula I Redação Esa - ParticularAndreza RosaAinda não há avaliações