Você também pode gostar
- Calculo Tecnico Aula7Documento8 páginasCalculo Tecnico Aula7Profissional SENAIAinda não há avaliações
- Desenhando uma engrenagem helicoidal tridimensional no InventorDocumento10 páginasDesenhando uma engrenagem helicoidal tridimensional no InventorIgor TrevisanAinda não há avaliações
- Roda de GenebraDocumento27 páginasRoda de Genebraleonardo manetti100% (4)
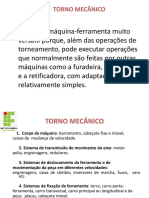
- Torno mecânico: máquina versátil para usinagemDocumento79 páginasTorno mecânico: máquina versátil para usinagemMarcos X AlmeidaAinda não há avaliações
- Como Ajustar A Suspensao Da Minha MotoDocumento9 páginasComo Ajustar A Suspensao Da Minha Motoapi-3698906100% (1)
- Catalogo Pro 2014 TRAMONTINADocumento70 páginasCatalogo Pro 2014 TRAMONTINAroneybaymaAinda não há avaliações
- Document statistics summaryDocumento2 páginasDocument statistics summaryJorge Alberto Ipinza MuñozAinda não há avaliações
- Motores assíncronos monofásicosDocumento15 páginasMotores assíncronos monofásicosgoncalves1981Ainda não há avaliações
- P09688 Central AgilityPopConnect REV0Documento2 páginasP09688 Central AgilityPopConnect REV0Magno Freitas100% (2)
- Mef - Tabelas de Unidades de MedidaDocumento5 páginasMef - Tabelas de Unidades de MedidamhzevianiAinda não há avaliações
- Especificações técnicas motor C43NE 6 cilindrosDocumento6 páginasEspecificações técnicas motor C43NE 6 cilindrosulisses_turco100% (1)
- Exercicio ROMIDocumento22 páginasExercicio ROMIjanchieta100% (1)
- Elementos de Máquinas I - EngrenagensDocumento23 páginasElementos de Máquinas I - Engrenagensdan campAinda não há avaliações
- Macete Do Tubo YES 125Documento6 páginasMacete Do Tubo YES 125Cleber MesquitaAinda não há avaliações
- Lista de Exercicios - Elemento de FixaçãoDocumento4 páginasLista de Exercicios - Elemento de FixaçãoRobertodeOLiveiraAinda não há avaliações
- Apostila de Metrologia 2 ParteDocumento33 páginasApostila de Metrologia 2 Partedanosdcno67% (3)
- Projetos Com Esp32 Programado Em Arduino - Parte ViiiNo EverandProjetos Com Esp32 Programado Em Arduino - Parte ViiiAinda não há avaliações
- Tabela de Manutenção - Civic 92-00Documento1 páginaTabela de Manutenção - Civic 92-00rodrigonunnesAinda não há avaliações
- Sistema de arrefecimento do motor - Precauções e preparaçãoDocumento30 páginasSistema de arrefecimento do motor - Precauções e preparaçãoSouza JuniorAinda não há avaliações
- Aula 02 - Controle Malha Aberta e FechadaDocumento4 páginasAula 02 - Controle Malha Aberta e FechadaLu SampaioAinda não há avaliações
- Instruções de segurança e operação de retificadoraDocumento108 páginasInstruções de segurança e operação de retificadoraThiago GomesAinda não há avaliações
- 1001 Gambiarras DR800Documento19 páginas1001 Gambiarras DR800Rodrigo Egea Peres50% (2)
- Folga de VálvulasDocumento6 páginasFolga de VálvulasTatiano BrolloAinda não há avaliações
- Manutenção automotiva em 1200hDocumento3 páginasManutenção automotiva em 1200hDanilo FreitasAinda não há avaliações
- Tipos Motores MotosDocumento3 páginasTipos Motores Motoslogion78839Ainda não há avaliações
- Tabela Fresa ModuloDocumento1 páginaTabela Fresa ModuloDarci José MestreAinda não há avaliações
- Manual de Desmontagem, Montagem e Análise de FalhasDocumento70 páginasManual de Desmontagem, Montagem e Análise de FalhasValbertgAinda não há avaliações
- GH900manual PDFDocumento2 páginasGH900manual PDFRobson GuedesAinda não há avaliações
- Alinhamento de Direcção. ÂngulosDocumento36 páginasAlinhamento de Direcção. ÂngulosAntónio FernandesAinda não há avaliações
- Injeção EletrônicaDocumento9 páginasInjeção EletrônicaRenamAinda não há avaliações
- Catálogo de peças RD 135'98Documento51 páginasCatálogo de peças RD 135'98Athiq NehmanAinda não há avaliações
- Conjunto Compressor de PalhetasDocumento5 páginasConjunto Compressor de PalhetasFred Porto100% (1)
- Osciloscopio Manual Dso 1.4Documento6 páginasOsciloscopio Manual Dso 1.4jfmadalenaAinda não há avaliações
- Comportamento dinâmico CVT GX9Documento1 páginaComportamento dinâmico CVT GX9Carlos André AraujoAinda não há avaliações
- Elementos de TransmissãoDocumento22 páginasElementos de TransmissãoFelipe “ma7Tos” MattosAinda não há avaliações
- Lista de peças de motores a gasolina NG137/NG137VDocumento29 páginasLista de peças de motores a gasolina NG137/NG137Vtazjuan1Ainda não há avaliações
- Manual Técnico - Manual de Instrução RV25 - RV25Documento6 páginasManual Técnico - Manual de Instrução RV25 - RV25André LuisAinda não há avaliações
- Mangueira PDFDocumento22 páginasMangueira PDFHebert N. de PaulaAinda não há avaliações
- Ângulo VálvulasDocumento9 páginasÂngulo VálvulasFernando AndradeAinda não há avaliações
- Apostila de ELEMENTOS DE MÁQUINASDocumento221 páginasApostila de ELEMENTOS DE MÁQUINASamiltoncravomoraes100% (1)
- Motor de Popa: Partes e FuncionamentoDocumento40 páginasMotor de Popa: Partes e FuncionamentoRenato Ferreira100% (1)
- Terminologia e simbologia na soldaDocumento10 páginasTerminologia e simbologia na soldaharylyAinda não há avaliações
- Catálogo automotivo SKF 2005Página25, 26, 29, 30, 31,32, 37, 38, 41, 42,43, 46, 49, 50, 51,52, 53, 54, 55, 56,57, 5825, 26, 29, 30, 31,32, 37, 38, 41, 42,43, 46, 49, 50, 51,52, 53, 54, 55, 56,57, 58Documento101 páginasCatálogo automotivo SKF 2005Página25, 26, 29, 30, 31,32, 37, 38, 41, 42,43, 46, 49, 50, 51,52, 53, 54, 55, 56,57, 5825, 26, 29, 30, 31,32, 37, 38, 41, 42,43, 46, 49, 50, 51,52, 53, 54, 55, 56,57, 58opercontactAinda não há avaliações
- Configurações avançadas modem VivoDocumento5 páginasConfigurações avançadas modem VivoMaycomTargino100% (1)
- Alarme microcontrolado para proteger motosDocumento16 páginasAlarme microcontrolado para proteger motosAntonio Carlos100% (1)
- 1.2 - Qualidades de Superficies e Toleranciamento Geometrico-2020Documento21 páginas1.2 - Qualidades de Superficies e Toleranciamento Geometrico-2020Valter MacicameAinda não há avaliações
- Manual Trituradora PDFDocumento56 páginasManual Trituradora PDFMAYRA ALEJANDRA CARDOZO FERROAinda não há avaliações
- Motores de indução monofásicos: tipos e teoria do campo giranteDocumento64 páginasMotores de indução monofásicos: tipos e teoria do campo girantekaminavaAinda não há avaliações
- Exercícios de Campo Magnético e Indução EletromagnéticaDocumento6 páginasExercícios de Campo Magnético e Indução Eletromagnéticaeduardo hei100% (1)
- Válvulas pneumáticas direcionais: símbolos e tipos de acionamentoDocumento8 páginasVálvulas pneumáticas direcionais: símbolos e tipos de acionamentoJorge luizAinda não há avaliações
- 333L Projeto de MecanismosDocumento38 páginas333L Projeto de Mecanismosallan0% (2)
- Roda de GenebraDocumento11 páginasRoda de GenebramariliaAinda não há avaliações
- Biela e ManivelaDocumento24 páginasBiela e Manivelagegejfm100% (1)
- PTG - Desenvolvimento de Projeto de Esteira1Documento17 páginasPTG - Desenvolvimento de Projeto de Esteira1Hannah CredencialAinda não há avaliações
- Desenvolvendo Uma Moenda de CanaDocumento14 páginasDesenvolvendo Uma Moenda de Canajovalmeida100% (3)
- Dimensionamento de Um Moto-RedutorDocumento27 páginasDimensionamento de Um Moto-RedutorTaynan SilvaAinda não há avaliações
- Projeto de Um Portão ElétricoDocumento10 páginasProjeto de Um Portão ElétricoTiago Horstmann100% (1)
- Relatorio de Projeto RedutorDocumento26 páginasRelatorio de Projeto RedutorCarlos RodriguesAinda não há avaliações
- Projetos industriais: treinamento e consultoria técnicaDocumento14 páginasProjetos industriais: treinamento e consultoria técnicarobertomsferreira100% (5)
- Síntese GráficaDocumento31 páginasSíntese GráficaBruno Ferreira CoutoAinda não há avaliações
- DIREÇÃODocumento1 páginaDIREÇÃOBruno Ferreira CoutoAinda não há avaliações
- Trabalho Diferenças Finitas UFG 2016-1Documento2 páginasTrabalho Diferenças Finitas UFG 2016-1Bruno Ferreira CoutoAinda não há avaliações
- Tese EletropneumáticaDocumento104 páginasTese EletropneumáticaBruno Ferreira CoutoAinda não há avaliações
- Primeiro teste de transferência de calor na nacele de turbina eólicaDocumento3 páginasPrimeiro teste de transferência de calor na nacele de turbina eólicaBruno Ferreira CoutoAinda não há avaliações
- Diagrama de MoodyDocumento1 páginaDiagrama de MoodyBruno Ferreira CoutoAinda não há avaliações
- Tecnologia EletropneumaticaDocumento152 páginasTecnologia EletropneumaticaWil WiltmarAinda não há avaliações
- Projeto de eixo rotativo por tensão, deflexão e velocidade críticaDocumento31 páginasProjeto de eixo rotativo por tensão, deflexão e velocidade críticaBruno Ferreira CoutoAinda não há avaliações
- Projeto de eixo rotativo por tensão, deflexão e velocidade críticaDocumento31 páginasProjeto de eixo rotativo por tensão, deflexão e velocidade críticaBruno Ferreira CoutoAinda não há avaliações
- Primeiro Teste TC1 2016-1Documento1 páginaPrimeiro Teste TC1 2016-1Bruno Ferreira CoutoAinda não há avaliações
- Análise Numérica de Condução Bidimensional em Parede Plana Por Diferenças Finitas No MatlabDocumento26 páginasAnálise Numérica de Condução Bidimensional em Parede Plana Por Diferenças Finitas No MatlabBruno Ferreira CoutoAinda não há avaliações
- Apostila LatexDocumento56 páginasApostila LatexsandmanofharlemAinda não há avaliações
- LatexDocumento60 páginasLatexmhenley8059Ainda não há avaliações
- A Matriz de Eisenhower para Priorizar o Tempo emDocumento3 páginasA Matriz de Eisenhower para Priorizar o Tempo emEuclides Do SharingaAinda não há avaliações
- 3995 Apostila de Solidworks (Autocad)Documento47 páginas3995 Apostila de Solidworks (Autocad)ThIaGoM100% (17)
- Pílula - RG - Gestão Do TempoDocumento8 páginasPílula - RG - Gestão Do TempoBruno Ferreira CoutoAinda não há avaliações
- Notas - Prova 3Documento1 páginaNotas - Prova 3Bruno Ferreira CoutoAinda não há avaliações
- Gestão de Tempo - EndeavorDocumento4 páginasGestão de Tempo - EndeavorBruno Ferreira CoutoAinda não há avaliações
- Esboço de CalendárioDocumento1 páginaEsboço de CalendárioBruno Ferreira CoutoAinda não há avaliações
- Tabela de Ajustes ISADocumento3 páginasTabela de Ajustes ISAGustavo KosterAinda não há avaliações
- Aula 13aDocumento1 páginaAula 13aBruno Ferreira CoutoAinda não há avaliações
- Horario Engenharia Mecanica 2017 2 FINALDocumento5 páginasHorario Engenharia Mecanica 2017 2 FINALBruno Ferreira CoutoAinda não há avaliações
- Bancada Didática Turbo-CompressorDocumento98 páginasBancada Didática Turbo-CompressorBruno Ferreira CoutoAinda não há avaliações
- Resumo ABNTDocumento3 páginasResumo ABNTBruno Ferreira CoutoAinda não há avaliações
- Apostila SolidWorks 2006Documento92 páginasApostila SolidWorks 2006Bruno Ferreira CoutoAinda não há avaliações
- Segundo Trabalho de Elementos de Máquinas 2 - Ana Carolina Brenno Bruno e JohnathanDocumento20 páginasSegundo Trabalho de Elementos de Máquinas 2 - Ana Carolina Brenno Bruno e JohnathanBruno Ferreira CoutoAinda não há avaliações
- Aula sobre diodos em eletrônica básicaDocumento14 páginasAula sobre diodos em eletrônica básicaBruno Ferreira CoutoAinda não há avaliações
- Atualização Mirror Link EvolveDocumento14 páginasAtualização Mirror Link EvolveArnaldo Rosentino Junior25% (4)
- A construção do significado em textosDocumento14 páginasA construção do significado em textosLuna Aps MartinsAinda não há avaliações
- Funções de Um Técnico Superior de EducaçãoDocumento1 páginaFunções de Um Técnico Superior de EducaçãoSónia FerreiraAinda não há avaliações
- Coluna de Perfuracao FormulasDocumento133 páginasColuna de Perfuracao FormulasStefano CorrêaAinda não há avaliações
- APECA - Exemplo RFAIDocumento277 páginasAPECA - Exemplo RFAIOsvaldo DiasAinda não há avaliações
- Matemática ComputacionalDocumento177 páginasMatemática ComputacionalJoão Rocha LabregoAinda não há avaliações
- RPG Mundo AnimeDocumento58 páginasRPG Mundo Animemalonejesus74Ainda não há avaliações
- Caderno Do Aluno 07-08 ICBAS 5ºDocumento11 páginasCaderno Do Aluno 07-08 ICBAS 5ºapi-3726545100% (3)
- Moçambique: País da África OrientalDocumento9 páginasMoçambique: País da África OrientalDominique Benjamim de MándiAinda não há avaliações
- 2022 02 23 ASSINADO Do3-Páginas-158-169Documento12 páginas2022 02 23 ASSINADO Do3-Páginas-158-169Marc ArnoldiAinda não há avaliações
- Memórias dos avós na sala de aulaDocumento18 páginasMemórias dos avós na sala de aulaValdirene SousaAinda não há avaliações
- Recuperação Da Barragem Do Gama Por Meio de Cutoff em Jet GroutingDocumento10 páginasRecuperação Da Barragem Do Gama Por Meio de Cutoff em Jet GroutingMax Gabriel Timo BarbosaAinda não há avaliações
- Sinopse Zoológica dos InvertebradosDocumento32 páginasSinopse Zoológica dos InvertebradosIcaro PereiraAinda não há avaliações
- Psicologia GeralDocumento2 páginasPsicologia GeralAli Braz Momade MucopotoAinda não há avaliações
- Sisu UEPB 2014Documento36 páginasSisu UEPB 2014Felipe SantosAinda não há avaliações
- Cinesioterapia - Aula 01pptDocumento18 páginasCinesioterapia - Aula 01pptPriscila Scott Gomes100% (1)
- Novo Código de Obras e Edificações de TeresinaDocumento61 páginasNovo Código de Obras e Edificações de TeresinaMarcos Gabriel Coimbra FrançaAinda não há avaliações
- Quesitos em Medicina LegalDocumento18 páginasQuesitos em Medicina LegalTen_SevalhoAinda não há avaliações
- ABNT NBR 14951defeitos de Pintura PDFDocumento4 páginasABNT NBR 14951defeitos de Pintura PDFrenanskAinda não há avaliações
- MicroStation 2D CAD GuideDocumento56 páginasMicroStation 2D CAD GuidesandreazoAinda não há avaliações
- Ética PastoralDocumento3 páginasÉtica PastoralGladson2010Ainda não há avaliações
- Análise Institucional LourauDocumento2 páginasAnálise Institucional LourauMatheus SantosAinda não há avaliações
- Fala, Memória - Vladimir NabokovDocumento278 páginasFala, Memória - Vladimir NabokovSilvio AgendaAinda não há avaliações
- Educação Especial E Inclusiva E Neuropsicopedagogia Institucional E Clínica 800 HorasDocumento2 páginasEducação Especial E Inclusiva E Neuropsicopedagogia Institucional E Clínica 800 Horaseasports maax0% (1)
- Libras - Atividade 3Documento1 páginaLibras - Atividade 3Lorena ReisAinda não há avaliações
- E-Book - Colonos, Posseiros e Grileiros.2020Documento208 páginasE-Book - Colonos, Posseiros e Grileiros.2020Maristela SoldaAinda não há avaliações
- Relatório Tempo de PegaDocumento6 páginasRelatório Tempo de PegacamilafernandescofAinda não há avaliações
- NR 35 - ResumoDocumento13 páginasNR 35 - ResumoCarol AlvesAinda não há avaliações
- Lista Hidro 2Documento4 páginasLista Hidro 2Flaviana Martins Conde OliveiraAinda não há avaliações
- Adelice Souza - Jeremias, Profeta Da ChuvaDocumento46 páginasAdelice Souza - Jeremias, Profeta Da ChuvakehrleAinda não há avaliações