Você também pode gostar
- Lider de Si Mesmo QuizzDocumento5 páginasLider de Si Mesmo QuizzIvo Charles50% (2)
- Magia Dourada-AstrologiaDocumento6 páginasMagia Dourada-AstrologiaPaula ChapoutoAinda não há avaliações
- Link de LivrosDocumento8 páginasLink de LivrosCaio PatricioAinda não há avaliações
- Macs - 10º AnoDocumento17 páginasMacs - 10º AnoLeonor Gouveia100% (2)
- Resumo Macs 10ºDocumento11 páginasResumo Macs 10ºMarianaSilva100% (3)
- Os Romanos 7º AnoDocumento10 páginasOs Romanos 7º AnoSusana Ferrao100% (1)
- MACS - 10º e 11º AnoDocumento32 páginasMACS - 10º e 11º AnoCristina Casquilho M. Castro100% (1)
- 9 Problemas de EmpacotamentoDocumento2 páginas9 Problemas de Empacotamentoflipe86% (7)
- Macs 10ºDocumento9 páginasMacs 10ºIvo Peixoto100% (1)
- 2 - Ficha Trabalho - Derivadas-11ºano-Maio 16-Francisco CabralDocumento2 páginas2 - Ficha Trabalho - Derivadas-11ºano-Maio 16-Francisco CabralAna Silva100% (1)
- Re82129 Ny11 Resolucoes Ga11Documento43 páginasRe82129 Ny11 Resolucoes Ga11itsbeeeaaa100% (2)
- A4 - Funções PeriódicasDocumento53 páginasA4 - Funções PeriódicasNuno M Alexandre83% (12)
- Resumo de MACS para o ExameDocumento28 páginasResumo de MACS para o ExameInes Viana100% (1)
- Probabilidades MACS 11anoDocumento2 páginasProbabilidades MACS 11anoRita Dimas100% (1)
- Teste4 2P MMACS11Documento9 páginasTeste4 2P MMACS11Mário Carneiro100% (1)
- MacsDocumento34 páginasMacsDaniela MartinsAinda não há avaliações
- Prova Global Máximo Junho 2020Documento12 páginasProva Global Máximo Junho 2020João Antunes100% (2)
- Proposta Teste3 MMACS10Documento9 páginasProposta Teste3 MMACS10Fernando Correia0% (1)
- 10ºano - MACS - PercentagensDocumento4 páginas10ºano - MACS - PercentagensCristinaAinda não há avaliações
- Teste Modulo A6Documento3 páginasTeste Modulo A6estela2013100% (1)
- Proposta Teste1 MMACS11Documento7 páginasProposta Teste1 MMACS11Maria Carvalho0% (1)
- 10ºano MACS Ficha 4 - Revisão Teste 3Documento4 páginas10ºano MACS Ficha 4 - Revisão Teste 3sofia NunesAinda não há avaliações
- Teste Macs 11Documento9 páginasTeste Macs 11Mário Carneiro75% (4)
- Propostas de Resolução Testes - ArealDocumento112 páginasPropostas de Resolução Testes - ArealJoana Reis0% (2)
- FA2 - Probabilidade CondicionadaDocumento4 páginasFA2 - Probabilidade CondicionadaJoão Pinto de CarvalhoAinda não há avaliações
- Disciplina: Matemática Módulo A1: Geometria 10º Ano: Ficha de Trabalho N.º 3Documento3 páginasDisciplina: Matemática Módulo A1: Geometria 10º Ano: Ficha de Trabalho N.º 3Susana da Silva Ribeiro0% (1)
- Resumo Teorico Matematica B 11º AnoDocumento15 páginasResumo Teorico Matematica B 11º AnoTiago Almeida100% (1)
- Ficha de Trabalho N.º 3: Curso Profissional A Professora: Susana RibeiroDocumento4 páginasFicha de Trabalho N.º 3: Curso Profissional A Professora: Susana RibeiroSusana da Silva RibeiroAinda não há avaliações
- TesteAvaliacao 11ano Nov2019 MMACS11Documento5 páginasTesteAvaliacao 11ano Nov2019 MMACS11Maria CarvalhoAinda não há avaliações
- Ae Macs1015 Teste 1Documento8 páginasAe Macs1015 Teste 1Adélia Gonçalves100% (1)
- Ficha de Trabalho 11C Grafos Set.09Documento3 páginasFicha de Trabalho 11C Grafos Set.09daniel.danibra6004100% (2)
- 1º Teste (A8) ResoluçãoDocumento4 páginas1º Teste (A8) ResoluçãoAnite GiVa100% (2)
- Resumos Macs 10 e 11 AnosDocumento36 páginasResumos Macs 10 e 11 AnosFilipe Marques100% (1)
- Proposta Teste2 MMACS11 PDFDocumento8 páginasProposta Teste2 MMACS11 PDFMaria CarvalhoAinda não há avaliações
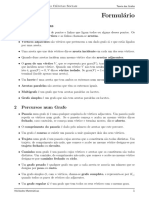
- Formulario Geometria 10ºanoDocumento2 páginasFormulario Geometria 10ºanokobeh1086% (7)
- Ficha de Avaliação Módulo A7 Junho 2020 PDFDocumento5 páginasFicha de Avaliação Módulo A7 Junho 2020 PDFTânia DiasAinda não há avaliações
- TesteAvaliacao 10ano NOV2020 MMACS10Documento9 páginasTesteAvaliacao 10ano NOV2020 MMACS10spacparenteAinda não há avaliações
- Ficha de Trabalho - Funções Logarítmicas - Módulo A9Documento4 páginasFicha de Trabalho - Funções Logarítmicas - Módulo A9Ana Sofia Martins100% (1)
- Programa Matemática B 10 e 11Documento2 páginasPrograma Matemática B 10 e 11Carlos GalhanoAinda não há avaliações
- MACS 10 (Teste 1) Out2019 TextoDocumento6 páginasMACS 10 (Teste 1) Out2019 TextoNatália CarneiroAinda não há avaliações
- Fichas MACS 11Documento25 páginasFichas MACS 11Elisabete E David100% (6)
- CadernoDeTestes2021 22Documento8 páginasCadernoDeTestes2021 22Xana Couto100% (1)
- TesteAvaliacao 10ano Maio2019 MMACS10Documento10 páginasTesteAvaliacao 10ano Maio2019 MMACS10João AntunesAinda não há avaliações
- Teste MacsDocumento2 páginasTeste Macscahenriques80% (5)
- Teste de Matemática 11 AnoDocumento8 páginasTeste de Matemática 11 AnoCarla NunesAinda não há avaliações
- Mma12 Fichas 2Documento61 páginasMma12 Fichas 2carolinaAinda não há avaliações
- Historia 11º Ano 2º Teste PDFDocumento4 páginasHistoria 11º Ano 2º Teste PDFSusana Ferrao100% (1)
- Ficha de Avaliação Diagnóstica 10º Ano MACSDocumento3 páginasFicha de Avaliação Diagnóstica 10º Ano MACSHelena Monteiro100% (2)
- Macs 10o e 11o Ano Resumos de Macs Com A Materia de 10o e 11o AnoDocumento33 páginasMacs 10o e 11o Ano Resumos de Macs Com A Materia de 10o e 11o AnoElisa DiasAinda não há avaliações
- MACS 11ano - Grafos ResumoDocumento5 páginasMACS 11ano - Grafos ResumoEduardo Felgueiras100% (2)
- Avaliação Bimestral de História e Geografia 3º Ano 1ºb - Anos IniciaisDocumento6 páginasAvaliação Bimestral de História e Geografia 3º Ano 1ºb - Anos IniciaisJosimar LuisAinda não há avaliações
- MACS - ModelosPopulacionaisDocumento6 páginasMACS - ModelosPopulacionaisRita DimasAinda não há avaliações
- FT 1 - Mód A7Documento2 páginasFT 1 - Mód A7Maria José Teixeira100% (13)
- Ficha 3 Prob MACS 12 13Documento3 páginasFicha 3 Prob MACS 12 13Narcisa Alexandra FilipeAinda não há avaliações
- Matemática - Geometria - Ficha de Trabalho Nº 4 - Conjuntos de Pontos e Condições Distância Entre Dois Pontos Mediatriz de Um SegmentoDocumento6 páginasMatemática - Geometria - Ficha de Trabalho Nº 4 - Conjuntos de Pontos e Condições Distância Entre Dois Pontos Mediatriz de Um SegmentoGeometria Ensino Médio100% (6)
- MACS (Teste3 11ano) 01 2020Documento4 páginasMACS (Teste3 11ano) 01 2020Sandra Seco100% (1)
- Proposta - Teste1 - MMACS11 - CópiaDocumento4 páginasProposta - Teste1 - MMACS11 - CópiaMaria Carvalho0% (1)
- Cpma1 Guia ProfDocumento23 páginasCpma1 Guia ProfPaula Maria da Silva Leitao0% (1)
- Teste Final Mod A1Documento3 páginasTeste Final Mod A1Eleuterio Monteiro50% (2)
- MACS - 11º AnoDocumento15 páginasMACS - 11º AnoCristinaSoaresAinda não há avaliações
- Macs 10º/11ºDocumento5 páginasMacs 10º/11ºrooniebunnyAinda não há avaliações
- Resumo GrafoDocumento4 páginasResumo GrafoArthur GarciaAinda não há avaliações
- GrafosDocumento8 páginasGrafosdanieldotsAinda não há avaliações
- Aplicação Do Teorema de EulerDocumento5 páginasAplicação Do Teorema de EulerkprbassAinda não há avaliações
- Modelos de GrafosDocumento31 páginasModelos de GrafosAna PetingaAinda não há avaliações
- Ficha FormativaDocumento4 páginasFicha FormativaNuno BarrosAinda não há avaliações
- Eu Na HistóriaDocumento2 páginasEu Na HistóriaSusana FerraoAinda não há avaliações
- 2019 2020 Eq10 02 Teste Elem Quim Sua Organiz v2Documento9 páginas2019 2020 Eq10 02 Teste Elem Quim Sua Organiz v2Susana FerraoAinda não há avaliações
- Atividade Sísmica: 5.1. - Estudo Dos SismosDocumento3 páginasAtividade Sísmica: 5.1. - Estudo Dos SismosSusana FerraoAinda não há avaliações
- Grecia Antiga 10º Ano HumanidadesDocumento10 páginasGrecia Antiga 10º Ano HumanidadesSusana FerraoAinda não há avaliações
- Fsica9ano 140514004421 Phpapp01Documento134 páginasFsica9ano 140514004421 Phpapp01Susana FerraoAinda não há avaliações
- Ha - Segredos-Que-O-Teu-Corpo-Pode-Nao-Estar-A-Conseguir-Partilhar-TeDocumento5 páginasHa - Segredos-Que-O-Teu-Corpo-Pode-Nao-Estar-A-Conseguir-Partilhar-TeJaymilâne ViturinoAinda não há avaliações
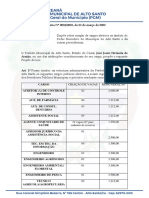
- Lei Ordinária Criando Cargos (Atualizada Com Remuneração2)Documento5 páginasLei Ordinária Criando Cargos (Atualizada Com Remuneração2)Vinicius FeitosaAinda não há avaliações
- I Ciclo Sim Pas 3Documento16 páginasI Ciclo Sim Pas 3Thiago FrancaAinda não há avaliações
- Planilha Do Plano de Aula - 03 A 11 de MarçoDocumento6 páginasPlanilha Do Plano de Aula - 03 A 11 de MarçoRuth Ferreira Avelar OliveiraAinda não há avaliações
- Apresentação EnsaiosDocumento10 páginasApresentação EnsaiosFernando Campagnaro ReisAinda não há avaliações
- Infusão BiodiversidadeDocumento18 páginasInfusão BiodiversidadeCatarina SousaAinda não há avaliações
- Avaliação de Conclusão de CursoDocumento2 páginasAvaliação de Conclusão de CursoIsaias Souza0% (1)
- Cat Plutao JDocumento2 páginasCat Plutao JMariano PinheiroAinda não há avaliações
- Texto Expositivo ExplicativoDocumento9 páginasTexto Expositivo ExplicativoMateus De Jesus100% (1)
- Trabalho de Recursos Huamnos PDFDocumento20 páginasTrabalho de Recursos Huamnos PDFSidónio MárioAinda não há avaliações
- Plano de AulaDocumento6 páginasPlano de AulaMaria FerreiraAinda não há avaliações
- Anastilose UrbanaDocumento14 páginasAnastilose UrbanaRafaela Simonato CitronAinda não há avaliações
- Slides Progressões PG - 2 A e B - Dia 22-03Documento10 páginasSlides Progressões PG - 2 A e B - Dia 22-03Romario_UEFSAinda não há avaliações
- Mergulho - Aula 1 - ApresentaçãoDocumento27 páginasMergulho - Aula 1 - ApresentaçãoRodrigo PereiraAinda não há avaliações
- Soldado - PM SPDocumento5 páginasSoldado - PM SPRhyan VenitesAinda não há avaliações
- M 04 PMRNDocumento37 páginasM 04 PMRNjorgeluis.pm.advAinda não há avaliações
- Noções de AdministraçãoDocumento137 páginasNoções de AdministraçãoAdmilson FerreiraAinda não há avaliações
- Formação GeralDocumento115 páginasFormação GeralJefferson RamosAinda não há avaliações
- Sequestro NagundaDocumento22 páginasSequestro NagundaNandoAinda não há avaliações
- História Resumos PDFDocumento30 páginasHistória Resumos PDFDalila De SousaAinda não há avaliações
- Configurações Do TransistorDocumento2 páginasConfigurações Do Transistorfofuchinho mphili mphumapoAinda não há avaliações
- Discurso de Tomada de Posse Do Coronel Pedro Brito Teixeira - RG3 - ZMM - VFDocumento5 páginasDiscurso de Tomada de Posse Do Coronel Pedro Brito Teixeira - RG3 - ZMM - VFPedro Brito TeixeiraAinda não há avaliações
- Atividades Setores Da EconomiaDocumento3 páginasAtividades Setores Da Economialilian betiuAinda não há avaliações
- Física Capítulo 1 - Lista 1Documento2 páginasFísica Capítulo 1 - Lista 1Eduardo CarvalhoAinda não há avaliações
- Dissertação - Comunicação de ModaDocumento105 páginasDissertação - Comunicação de ModaMarianaMartoranoAinda não há avaliações
- Lista de Exercícios - Biologia Prof. Shesterson (Aulão ENEM 2022)Documento2 páginasLista de Exercícios - Biologia Prof. Shesterson (Aulão ENEM 2022)Luiza MonteiroAinda não há avaliações