Você também pode gostar
- TCC - Elliott Felipe v4Documento22 páginasTCC - Elliott Felipe v4Elliott ChavesAinda não há avaliações
- Geração Fotovoltaica em SDEE: Uma Breve Avaliação Dos Impactos Técnicos e Econômicos - SBSE 2016Documento6 páginasGeração Fotovoltaica em SDEE: Uma Breve Avaliação Dos Impactos Técnicos e Econômicos - SBSE 2016Rivanildo AlvesAinda não há avaliações
- Fluxo de potência: Teoria e implementação de códigos computacionaisNo EverandFluxo de potência: Teoria e implementação de códigos computacionaisAinda não há avaliações
- Algoritmo de Fluxo de Carga Com GDDocumento8 páginasAlgoritmo de Fluxo de Carga Com GDAugusto CasteloAinda não há avaliações
- Apostilha 1Documento28 páginasApostilha 1Felipe NunesAinda não há avaliações
- GPL 1148-IdpDocumento9 páginasGPL 1148-Idprcc_caetaAinda não há avaliações
- Admin, Andréia Crico Dos Santos, Carlos Eduardo TavaresDocumento31 páginasAdmin, Andréia Crico Dos Santos, Carlos Eduardo TavaresDanilo na BahiaAinda não há avaliações
- Sistemas Elétricos IDocumento3 páginasSistemas Elétricos IAugusto Santos (Slifer)Ainda não há avaliações
- Eraldo - Fluxo de PotênciaDocumento91 páginasEraldo - Fluxo de PotênciaAlex HenriqueAinda não há avaliações
- Estudo Do Fluxo de Potência Otimizado Com A Adição DaDocumento8 páginasEstudo Do Fluxo de Potência Otimizado Com A Adição DaEdson CavalcanteAinda não há avaliações
- Ajuste de Fator de Potência Da Geração EólicaDocumento153 páginasAjuste de Fator de Potência Da Geração EólicaManoel Camargo SampaioAinda não há avaliações
- Fluxo de Potência em Sistema de DistribuiçãoDocumento13 páginasFluxo de Potência em Sistema de DistribuiçãoEmily DanyaniAinda não há avaliações
- Projeto - Análise de SEPs (2019.2)Documento6 páginasProjeto - Análise de SEPs (2019.2)Epitácio Junior Mauriz de Moura FeitosaAinda não há avaliações
- Mapa - Análise de Sistemas de Potência - 54 2023Documento8 páginasMapa - Análise de Sistemas de Potência - 54 2023Fabio GuimaraesAinda não há avaliações
- Relatório 02 - EletricidadeDocumento24 páginasRelatório 02 - EletricidadeDaniel RodrigoAinda não há avaliações
- Construção de Curvas de Capabilidade de Geradores Síncronos Usando MatlabDocumento8 páginasConstrução de Curvas de Capabilidade de Geradores Síncronos Usando MatlabLucas TozattiAinda não há avaliações
- Mapa - Análise de Sistemas de Potência - 542023Documento4 páginasMapa - Análise de Sistemas de Potência - 542023AZUL ASSESSORIA ACADÊMICAAinda não há avaliações
- FrequenciaDocumento13 páginasFrequenciaRafael FeitosaAinda não há avaliações
- 2019 Modelo LCC Mitigacao OscilacoesDocumento9 páginas2019 Modelo LCC Mitigacao Oscilacoesrcc_caetaAinda não há avaliações
- Apostila SEP Fluxo de Carga Muito BoaDocumento153 páginasApostila SEP Fluxo de Carga Muito BoaFrancisco De Assis Dias80% (5)
- Trabalho 2 ASEPDocumento8 páginasTrabalho 2 ASEPkeveny2000Ainda não há avaliações
- Estudo de Fluxo de PotênciaDocumento6 páginasEstudo de Fluxo de PotênciaJose NhanzaAinda não há avaliações
- Realocação Dinâmica de Cargas Monofásicas para Equilibrio de FaseDocumento116 páginasRealocação Dinâmica de Cargas Monofásicas para Equilibrio de FaseRafael Mendes Amorim100% (1)
- Transmissão de EnergiaDocumento17 páginasTransmissão de EnergiaEduardo SaiterAinda não há avaliações
- Gat13 PDFDocumento6 páginasGat13 PDFMarco Antonio Esquivel BarretoAinda não há avaliações
- Análise Da Propagação de Ondas Viajantes em Uma Linha de Transmissão HVDC Com Geração Distribuída Através Da Elaboração de Um Simulador Didático.Documento6 páginasAnálise Da Propagação de Ondas Viajantes em Uma Linha de Transmissão HVDC Com Geração Distribuída Através Da Elaboração de Um Simulador Didático.Daniel CarlosAinda não há avaliações
- 0535 GDS/ (Codigo) : Clock de Processadores Relegou A Estratégia de Paralelização A Um Segundo Plano Nos ProgramasDocumento9 páginas0535 GDS/ (Codigo) : Clock de Processadores Relegou A Estratégia de Paralelização A Um Segundo Plano Nos ProgramasThomas CampelloAinda não há avaliações
- Estudo de Caso de Interação Transformador-Sistema de Uma Subestação deDocumento10 páginasEstudo de Caso de Interação Transformador-Sistema de Uma Subestação deHUGO GOMESAinda não há avaliações
- Artigo Modelagem MatemáticaDocumento12 páginasArtigo Modelagem MatemáticaErika SaviAinda não há avaliações
- 1953M 1Documento90 páginas1953M 1Marcelo GonçalvesAinda não há avaliações
- Modelo TCCDocumento86 páginasModelo TCCFlávio GomesAinda não há avaliações
- Estudo de Fluxo de CargaDocumento76 páginasEstudo de Fluxo de CargaRenata Oliveira0% (1)
- Modelos de CargaDocumento15 páginasModelos de CargaVinicius FerrariAinda não há avaliações
- Trabalho Equivalentes ExternosDocumento10 páginasTrabalho Equivalentes ExternosDione VieiraAinda não há avaliações
- (v1,0) Análise de Sistemas Elétricos de Potência em Corrente ContínuaDocumento80 páginas(v1,0) Análise de Sistemas Elétricos de Potência em Corrente ContínuaDinilton PessoaAinda não há avaliações
- Uma Abordagem de Circuitos Elétricos Utilizando Sistemas LinearesDocumento5 páginasUma Abordagem de Circuitos Elétricos Utilizando Sistemas LinearesmuhijAinda não há avaliações
- Cap 2 - Dissertacao de Mestrado - Dante ShimodaDocumento30 páginasCap 2 - Dissertacao de Mestrado - Dante ShimodaDante ShimodaAinda não há avaliações
- Dimensionamento de Filtros Passivos Considerando Considerando Modelos de Cargas Lineares Na Analise HarmonicaDocumento8 páginasDimensionamento de Filtros Passivos Considerando Considerando Modelos de Cargas Lineares Na Analise HarmonicaRobert WilliamAinda não há avaliações
- Lohuana Alice Silva Morais - TCC Monografia - Engenharia ElétricaDocumento103 páginasLohuana Alice Silva Morais - TCC Monografia - Engenharia Elétricatop1poneyAinda não há avaliações
- Modelagem Do STATCOM para o Metodo Da Soma de PotenciasDocumento6 páginasModelagem Do STATCOM para o Metodo Da Soma de PotenciasAndrea Araujo SousaAinda não há avaliações
- Dissertação 2021050Documento138 páginasDissertação 2021050FelipeSilvaAinda não há avaliações
- Revista Esfera Tecnologia v05 n02 Artigo02Documento18 páginasRevista Esfera Tecnologia v05 n02 Artigo02Edlásio HenriquesAinda não há avaliações
- Estudo Dirigido 2 - Mayro de LimaDocumento5 páginasEstudo Dirigido 2 - Mayro de LimaMayro De LimaAinda não há avaliações
- Compensador Estático de Reativos Controlado A Tiristores Modelagem e SimulaçãoDocumento6 páginasCompensador Estático de Reativos Controlado A Tiristores Modelagem e Simulaçãojulio_souveiaAinda não há avaliações
- Artigo Emulador PV Cba-2018 FinalDocumento9 páginasArtigo Emulador PV Cba-2018 FinalAdjeferson Custódio GomesAinda não há avaliações
- Malha de Aterramento para Linhas de TransmissãoDocumento13 páginasMalha de Aterramento para Linhas de Transmissãov112345Ainda não há avaliações
- Estudo Dirigido 1 - Mayro de LimaDocumento10 páginasEstudo Dirigido 1 - Mayro de LimaMayro De LimaAinda não há avaliações
- Análise Do Comportamento de Geradores Síncronos A ÍmãsDocumento32 páginasAnálise Do Comportamento de Geradores Síncronos A Ímãseng.walter.soaresAinda não há avaliações
- Mia BolsaDocumento4 páginasMia BolsaJoão VituAinda não há avaliações
- 4 - Tese Burian 29 - 10 - 2009 - Final - RevisadaDocumento210 páginas4 - Tese Burian 29 - 10 - 2009 - Final - RevisadaVinicius S. T. FerreAinda não há avaliações
- Artigo Dimensionamento Barramentos 2004Documento8 páginasArtigo Dimensionamento Barramentos 2004LUCELINO DA COSTA LARANJEIRAAinda não há avaliações
- GAT14Documento9 páginasGAT14Marco Antonio Esquivel BarretoAinda não há avaliações
- SBC TemplateDocumento23 páginasSBC TemplateGustavo Lino Morales EspinozaAinda não há avaliações
- Técnicas de inteligência artificial aplicadas na análise de mercados de eletricidade: desafios técnico-econômicos associados à geração eólica e aos sistemas de armazenamento de energiaNo EverandTécnicas de inteligência artificial aplicadas na análise de mercados de eletricidade: desafios técnico-econômicos associados à geração eólica e aos sistemas de armazenamento de energiaAinda não há avaliações
- Filtro Ativo de Potência e Armazenamento em Sistemas de Distribuição: uma Busca pela Qualidade e Eficiência Energética em Sistemas com Geração IntermitenteNo EverandFiltro Ativo de Potência e Armazenamento em Sistemas de Distribuição: uma Busca pela Qualidade e Eficiência Energética em Sistemas com Geração IntermitenteAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Aula 3Documento28 páginasAula 3Rafael FeitosaAinda não há avaliações
- Apresentacao Aula AtpDocumento59 páginasApresentacao Aula AtpRafael FeitosaAinda não há avaliações
- Problemas Com Gerador e Inversor de Frequência? Um Filtro de Harmônica Poderá ResolverDocumento7 páginasProblemas Com Gerador e Inversor de Frequência? Um Filtro de Harmônica Poderá ResolverRafael FeitosaAinda não há avaliações
- 1366M - ModelagemDocumento145 páginas1366M - ModelagemRafael FeitosaAinda não há avaliações
- Aula 1Documento32 páginasAula 1Rafael FeitosaAinda não há avaliações
- Aula 07 - Proteção Sistemas de Distribuição 2Documento18 páginasAula 07 - Proteção Sistemas de Distribuição 2Rafael FeitosaAinda não há avaliações
- ArtigoDocumento4 páginasArtigoRafael FeitosaAinda não há avaliações
- 08 Fator de PotênciaDocumento25 páginas08 Fator de PotênciaRafael FeitosaAinda não há avaliações
- Estratégias Ótimas para Projetos de Filtros Harmõnicos Utilizando Algoritmos GenéticosDocumento6 páginasEstratégias Ótimas para Projetos de Filtros Harmõnicos Utilizando Algoritmos GenéticosRafael FeitosaAinda não há avaliações
- Análise Harmônica de Redes Elétricas Utilizando o Software PCFLODocumento127 páginasAnálise Harmônica de Redes Elétricas Utilizando o Software PCFLOANDRE ALBUQUERQUEAinda não há avaliações
- MONOGRAFIA DiagnosticoDistorçõesHarmônicasDocumento114 páginasMONOGRAFIA DiagnosticoDistorçõesHarmônicasRafael FeitosaAinda não há avaliações
- RPNascimentoDISPRT noPWDocumento251 páginasRPNascimentoDISPRT noPWcamilinhabantuAinda não há avaliações
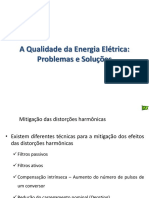
- 2010 - I. A. Pires - Medidas de Mitigação de Harmônicos PDFDocumento10 páginas2010 - I. A. Pires - Medidas de Mitigação de Harmônicos PDFPaulo MercêsAinda não há avaliações
- ProcedimentosDeRede Módulo 2 Submódulo 2.8 Submódulo 2.8 Rev 0.3Documento30 páginasProcedimentosDeRede Módulo 2 Submódulo 2.8 Submódulo 2.8 Rev 0.3Rafael FeitosaAinda não há avaliações
- EmbasaDocumento53 páginasEmbasaelisiolealAinda não há avaliações
- 6 FiltrosDocumento40 páginas6 FiltrosRafael FeitosaAinda não há avaliações
- Questao 6001Documento15 páginasQuestao 6001Rafael FeitosaAinda não há avaliações
- Influencia Mutua Entre Harmonicos e Cargas Nao-LinDocumento11 páginasInfluencia Mutua Entre Harmonicos e Cargas Nao-LinRafael FeitosaAinda não há avaliações
- Protecao I - Pse - 2019 PDFDocumento92 páginasProtecao I - Pse - 2019 PDFrenatofcortesAinda não há avaliações
- MONOGRAFIA DiagnosticoDistorçõesHarmônicasDocumento114 páginasMONOGRAFIA DiagnosticoDistorçõesHarmônicasRafael FeitosaAinda não há avaliações
- Lista 2 - Prova 3Documento2 páginasLista 2 - Prova 3Rafael FeitosaAinda não há avaliações
- Ibge Agente Censitario de Informatica Aci Ibge Aci Tipo111111111111111Documento12 páginasIbge Agente Censitario de Informatica Aci Ibge Aci Tipo111111111111111Lucas CoutoAinda não há avaliações
- Prova 3Documento4 páginasProva 3Rafael FeitosaAinda não há avaliações
- Codigo de Etica - IBGEDocumento22 páginasCodigo de Etica - IBGEFrancisco ErisvaldoAinda não há avaliações
- Modulo 09 Reles Direcionais de Corrente PDF FreeDocumento49 páginasModulo 09 Reles Direcionais de Corrente PDF FreeRafael FeitosaAinda não há avaliações
- Aula 13 ENE095Documento44 páginasAula 13 ENE095Rafael FeitosaAinda não há avaliações
- Artigo ESRDocumento3 páginasArtigo ESRRafael FeitosaAinda não há avaliações
- Estratégias de Produção e Circulação de Conteúdos DigitaisDocumento9 páginasEstratégias de Produção e Circulação de Conteúdos DigitaisElizabeth Nucci MilaniAinda não há avaliações
- Midias Sociais Manual de Boas PraticasDocumento60 páginasMidias Sociais Manual de Boas PraticasDaniela RangelAinda não há avaliações
- DATASHEET - Apresentação TechnoDNSDocumento7 páginasDATASHEET - Apresentação TechnoDNSMateus OrsineAinda não há avaliações
- Busca Preço G2Documento15 páginasBusca Preço G2Rios Moda Rios ModaAinda não há avaliações
- Redes de Computadores A.tanenbaum 4aeDocumento17 páginasRedes de Computadores A.tanenbaum 4aeQuilombo Cachoeira Porteira100% (1)
- Banco de Dados Distribuidos Oracle PDFDocumento14 páginasBanco de Dados Distribuidos Oracle PDFalessandrod01Ainda não há avaliações
- Drive Recepcao de PesoDocumento15 páginasDrive Recepcao de PesoMurilo VargesAinda não há avaliações
- Apresentação Da AcademiaDocumento265 páginasApresentação Da AcademiaNelio Oliveira SantosAinda não há avaliações
- Alarmes Fiberhome PortuguesDocumento212 páginasAlarmes Fiberhome Portuguessgomespro25% (4)
- iMERCADO InformacoesTransacionais EspecificacaoeCatalogo-B3Documento22 páginasiMERCADO InformacoesTransacionais EspecificacaoeCatalogo-B3Cid OugaskeAinda não há avaliações
- Extracao e Analise de Dados em Memoria Na Pericia Forense ComputacionalDocumento8 páginasExtracao e Analise de Dados em Memoria Na Pericia Forense ComputacionalEdson T de JesusAinda não há avaliações
- Perguntas Frequentes SATDocumento44 páginasPerguntas Frequentes SATeverttuAinda não há avaliações
- 3 CnuvemDocumento24 páginas3 Cnuvemdiego spolitoAinda não há avaliações
- HI Tecnologia: Notas de AplicaçãoDocumento20 páginasHI Tecnologia: Notas de AplicaçãoEduardo Cinesio Costa da SilvaAinda não há avaliações
- Win 32Documento424 páginasWin 32Gabriel CorreiaAinda não há avaliações
- (Log) C3u1s1a3Documento10 páginas(Log) C3u1s1a3Gabrielly SantosAinda não há avaliações
- Manual NVD 1404 1408 1416 Português 2Documento125 páginasManual NVD 1404 1408 1416 Português 2MocaAinda não há avaliações
- Protocolo Can PDFDocumento163 páginasProtocolo Can PDFWelleyAinda não há avaliações
- Aplicativos Informátizados AI 1 e 2 - Sistemas OperacionaisDocumento28 páginasAplicativos Informátizados AI 1 e 2 - Sistemas OperacionaisCristopher RamirezAinda não há avaliações
- Como Instalar e Configurar Routers e Switches CISCODocumento307 páginasComo Instalar e Configurar Routers e Switches CISCOh4ck3rw4gn3r100% (2)
- Resumo Capitulo 01 Redes de Computadores e A InternetDocumento13 páginasResumo Capitulo 01 Redes de Computadores e A InternetAdemar Alves TrindadeAinda não há avaliações
- Revista Infra Magazine 07Documento50 páginasRevista Infra Magazine 07Lucas M Aguiar Costa100% (1)
- Sistemas Estruturados em Redes de ComputadoresDocumento5 páginasSistemas Estruturados em Redes de ComputadoresMarcelo Alves da CruzAinda não há avaliações
- Manuais Equipamentos Humax HGJ310Documento60 páginasManuais Equipamentos Humax HGJ310e2a8dbaeAinda não há avaliações
- Troubleshooting de Portas de Switches e Interfaces PDFDocumento62 páginasTroubleshooting de Portas de Switches e Interfaces PDFabelardo solombeAinda não há avaliações
- Era Da InformaçãoDocumento1 páginaEra Da InformaçãoDalliane RodriguesAinda não há avaliações
- Fazer Teste - QUESTIONÁRIO UNIDADE I - ESTUDOS ..Documento2 páginasFazer Teste - QUESTIONÁRIO UNIDADE I - ESTUDOS ..Evelyn Ribeiro50% (2)
- Manual de Navegação Na InternetDocumento38 páginasManual de Navegação Na InternetElisabete SilvaAinda não há avaliações
- Fundamentos Da Computacao - Completo PDFDocumento15 páginasFundamentos Da Computacao - Completo PDFJonathan DominguesAinda não há avaliações
- REDES DE COMPUTADORES I - Material de ApoioDocumento46 páginasREDES DE COMPUTADORES I - Material de ApoioFranclides MateusAinda não há avaliações