Você também pode gostar
- Geometria ImagemDocumento507 páginasGeometria ImagemJeovanio RezendeAinda não há avaliações
- Aula 02 - Figuras GeométricasDocumento14 páginasAula 02 - Figuras GeométricasDouglas Gomes95% (20)
- Conexões e educação matemática - Brincadeiras, explorações e ações: Vol 2No EverandConexões e educação matemática - Brincadeiras, explorações e ações: Vol 2Ainda não há avaliações
- Noções básicas de Geometria: pontos, retas, planos e figurasDocumento10 páginasNoções básicas de Geometria: pontos, retas, planos e figurasArlaineGabrielaAinda não há avaliações
- Cezar Roberto Carvalho Baecllar Mesquita1Documento9 páginasCezar Roberto Carvalho Baecllar Mesquita1Henrique Cubas MachadoAinda não há avaliações
- O que cai na prova de Matemática do EnemDocumento9 páginasO que cai na prova de Matemática do EnemCarlos MorenoAinda não há avaliações
- FIGURAS GEOMÉTRICAS - Prof AnneDocumento22 páginasFIGURAS GEOMÉTRICAS - Prof AnneAnne KarolineAinda não há avaliações
- Power Point - Projeto Retas ReversasDocumento53 páginasPower Point - Projeto Retas ReversasAndre25matAinda não há avaliações
- Geometria de Posição e Relação de EulerDocumento12 páginasGeometria de Posição e Relação de Eulergabriela.gomes.batistAinda não há avaliações
- Matemática: Noções de GeometriaDocumento15 páginasMatemática: Noções de GeometriaPontes João PauloAinda não há avaliações
- Revisão de Geometria Plana e EspacialDocumento18 páginasRevisão de Geometria Plana e EspaciallucianadtaAinda não há avaliações
- Apostila Geometria Analítica Com TarefasDocumento17 páginasApostila Geometria Analítica Com TarefasIsa Moreira FelisbinoAinda não há avaliações
- Ebookmatematicabasica PDFDocumento42 páginasEbookmatematicabasica PDFLucas KocsisAinda não há avaliações
- GeoplanosDocumento15 páginasGeoplanosScanners Potiguar100% (1)
- Geometria Espacial PosiçõesDocumento11 páginasGeometria Espacial PosiçõesFernandaAinda não há avaliações
- Imprimir GeometriaDocumento22 páginasImprimir Geometria臭素ゲーマーAinda não há avaliações
- Observação de Formas Geométricas Espaciais: MatemáticaDocumento22 páginasObservação de Formas Geométricas Espaciais: Matemáticalivianfernandes2007Ainda não há avaliações
- Desenho Técnico: Geometria Descritiva e Figuras GeométricasDocumento33 páginasDesenho Técnico: Geometria Descritiva e Figuras GeométricasVitorMotaAinda não há avaliações
- GEOMETRIADocumento34 páginasGEOMETRIARone Von Alves FurtadoAinda não há avaliações
- Geometria Espacial - Conceitos, Figuras, Fórmulas - Brasil EscolaDocumento21 páginasGeometria Espacial - Conceitos, Figuras, Fórmulas - Brasil Escolatia pikjinAinda não há avaliações
- Axiomas e Postulados Geometria 2º ANODocumento22 páginasAxiomas e Postulados Geometria 2º ANObemart35Ainda não há avaliações
- 3 - Resumo Área e PerímetroDocumento7 páginas3 - Resumo Área e PerímetroCatia MartinsAinda não há avaliações
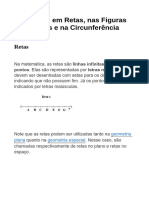
- Ângulos em Retas, Nas Figuras Planas e Na CircunferênciaDocumento26 páginasÂngulos em Retas, Nas Figuras Planas e Na CircunferênciaTricsAinda não há avaliações
- Unidade 6 Geometria Plana E Espacial: Prof.: Msc. Vanessa Da LuzDocumento26 páginasUnidade 6 Geometria Plana E Espacial: Prof.: Msc. Vanessa Da LuzMarcio PereginiAinda não há avaliações
- Aula 4 Geometria e TrigonometriaDocumento19 páginasAula 4 Geometria e TrigonometriaBárbara FalchiAinda não há avaliações
- 06 Retas e PlanosDocumento6 páginas06 Retas e PlanosmiabijuAinda não há avaliações
- 54 PirâmideDocumento0 página54 PirâmideLorena BritoAinda não há avaliações
- Relação de Euler e PrismaDocumento9 páginasRelação de Euler e PrismaNatanael RicardoAinda não há avaliações
- DiedroDocumento6 páginasDiedroDanylo OliveiraAinda não há avaliações
- Apostila Geometria AnalíticaDocumento13 páginasApostila Geometria AnalíticaIsa Moreira FelisbinoAinda não há avaliações
- Geometria Da EsferaDocumento7 páginasGeometria Da EsferaNayanne MonteiroAinda não há avaliações
- Figuras geométricas elementares e sólidosDocumento14 páginasFiguras geométricas elementares e sólidosRoney PereiraAinda não há avaliações
- Geometria PlanaDocumento8 páginasGeometria PlanaKirito SunAinda não há avaliações
- Apostila Matemática - Geometria PlanaDocumento15 páginasApostila Matemática - Geometria PlanaMatemática Mathclassy100% (13)
- Oficina de Matemática - Geometria e Figuras PlanasDocumento29 páginasOficina de Matemática - Geometria e Figuras PlanasFernandoAinda não há avaliações
- Apostila de DesenhoDocumento92 páginasApostila de DesenhoAcauan NormantonAinda não há avaliações
- Geometria BásicaDocumento14 páginasGeometria Básicacavaco511Ainda não há avaliações
- Matemática 2º ANO 5 BIMDocumento12 páginasMatemática 2º ANO 5 BIMVilson de FigueredoAinda não há avaliações
- Minicurso AreaDocumento12 páginasMinicurso AreaJessica de AbreuAinda não há avaliações
- Template - Projeto de LP Versão Final V3Documento17 páginasTemplate - Projeto de LP Versão Final V3mariafernandasantosmoura980Ainda não há avaliações
- Retomando o Que Aprendemos - Parte II: MatemáticaDocumento19 páginasRetomando o Que Aprendemos - Parte II: Matemáticabrupinterest4Ainda não há avaliações
- Resumo Matematica 7º 8º 9ºDocumento24 páginasResumo Matematica 7º 8º 9ºSusana ChavesAinda não há avaliações
- Ensinando Geometria Com o GeoplanoDocumento13 páginasEnsinando Geometria Com o Geoplanoeveraldo edson maiaAinda não há avaliações
- Geometria Plana: conceitos e figurasDocumento3 páginasGeometria Plana: conceitos e figurasEduarda LarsenAinda não há avaliações
- Matemática Aplicada À Agrimensura IDocumento56 páginasMatemática Aplicada À Agrimensura ICecilia CorreaAinda não há avaliações
- Introdução À Geometria EspacialDocumento12 páginasIntrodução À Geometria EspacialMarcelo NunesAinda não há avaliações
- Congruências de TriângulosDocumento27 páginasCongruências de TriângulosfsfhtduAinda não há avaliações
- 3° Ano JunhoDocumento15 páginas3° Ano JunhoKary100% (1)
- Transformações da Imagem: Isometrias, Semelhanças e ProjetividadesNo EverandTransformações da Imagem: Isometrias, Semelhanças e ProjetividadesAinda não há avaliações
- Unidade 1 Apostila de Instrumentação para o Ensino Da Matemática IIIDocumento14 páginasUnidade 1 Apostila de Instrumentação para o Ensino Da Matemática IIIJefferson VechoAinda não há avaliações
- Unidade 4 Apostila de Instrumentação para o Ensino Da Matemática IIIDocumento16 páginasUnidade 4 Apostila de Instrumentação para o Ensino Da Matemática IIIJefferson VechoAinda não há avaliações
- Unidade 3 Apostila de Instrumentação para o Ensino Da Matemática IIIDocumento16 páginasUnidade 3 Apostila de Instrumentação para o Ensino Da Matemática IIIJefferson VechoAinda não há avaliações
- Apostila de Instrumentação para o Ensino Da Matemática IIDocumento80 páginasApostila de Instrumentação para o Ensino Da Matemática IIJefferson VechoAinda não há avaliações
- Unidade 2 Apostila de Instrumentação para o Ensino Da Matemática IIIDocumento11 páginasUnidade 2 Apostila de Instrumentação para o Ensino Da Matemática IIIJefferson VechoAinda não há avaliações
- Validação Do RelatórioDocumento1 páginaValidação Do RelatórioJefferson VechoAinda não há avaliações
- Unidade 6 Apostila de Instrumentação para o Ensino Da Matemática IIIDocumento9 páginasUnidade 6 Apostila de Instrumentação para o Ensino Da Matemática IIIJefferson VechoAinda não há avaliações
- Questionário IIDocumento4 páginasQuestionário IIJefferson VechoAinda não há avaliações
- Caso Clínico 1Documento3 páginasCaso Clínico 1Jefferson VechoAinda não há avaliações
- Questionário IDocumento3 páginasQuestionário IJefferson VechoAinda não há avaliações
- LuDocumento49 páginasLuJefferson VechoAinda não há avaliações
- 1732 - SUS - Lei 8.080 - 90 - Apostila AmostraDocumento15 páginas1732 - SUS - Lei 8.080 - 90 - Apostila AmostraGilson MeiraAinda não há avaliações
- Interdisciplinaridade Educação InfantilDocumento2 páginasInterdisciplinaridade Educação InfantilJefferson VechoAinda não há avaliações
- PEI Plano Educacional Individualizado 2019 WORDDocumento19 páginasPEI Plano Educacional Individualizado 2019 WORDJefferson VechoAinda não há avaliações
- Mutirões de atualização cadastralDocumento3 páginasMutirões de atualização cadastralJefferson VechoAinda não há avaliações
- Ficha Men To Camada de Transport eDocumento6 páginasFicha Men To Camada de Transport eJefferson VechoAinda não há avaliações
- Aula 2Documento16 páginasAula 2Jefferson VechoAinda não há avaliações
- Projet Opes Quis ADocumento14 páginasProjet Opes Quis AJefferson VechoAinda não há avaliações
- Relatorio Servico de Diretorios PDFDocumento7 páginasRelatorio Servico de Diretorios PDFJefferson VechoAinda não há avaliações
- Curso Prático de Visual Studio - Net 2005Documento0 páginaCurso Prático de Visual Studio - Net 2005cpcarreiroAinda não há avaliações
- Novo To de AulasDocumento3 páginasNovo To de AulasJefferson VechoAinda não há avaliações
- ReadmeDocumento1 páginaReadmeRíminni LavieriAinda não há avaliações