Você também pode gostar
- Dados Da Fatura de ElectricidadeDocumento2 páginasDados Da Fatura de ElectricidadeRui FonteAinda não há avaliações
- Processos de Refino 1 - DestilaçãoDocumento125 páginasProcessos de Refino 1 - DestilaçãoLuan Gabriel100% (4)
- Automação de Um Silo de Armazenagem de GrãosDocumento34 páginasAutomação de Um Silo de Armazenagem de GrãosNathan Belluzzo0% (1)
- Relatório - Constante de PlanckDocumento13 páginasRelatório - Constante de PlanckThais RosinhaAinda não há avaliações
- Apostila - CCP SBSP 2020Documento25 páginasApostila - CCP SBSP 2020Daniel SbizzaroAinda não há avaliações
- 8 - DestilaçãoDocumento44 páginas8 - DestilaçãoBrenna MouraAinda não há avaliações
- Scania Hpi Ems S6Documento4 páginasScania Hpi Ems S6Tariq Khamaysa100% (2)
- Pop Lab Int - 003 201999999999999999999Documento29 páginasPop Lab Int - 003 201999999999999999999Patricia FarmAinda não há avaliações
- Dimensionamento de Pavimentos Flexíveis para PDFDocumento52 páginasDimensionamento de Pavimentos Flexíveis para PDFMax MoreiraAinda não há avaliações
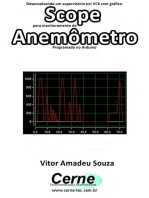
- Desenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Anemômetro Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Anemômetro Programado No ArduinoAinda não há avaliações
- Lucas Ribeiro End Plate (Horner)Documento40 páginasLucas Ribeiro End Plate (Horner)Matheus PradoAinda não há avaliações
- Monografia ComissionamentoDocumento96 páginasMonografia ComissionamentoTiago RibeiroAinda não há avaliações
- Laura Bachega Atividade1Documento31 páginasLaura Bachega Atividade1Laura BachegaAinda não há avaliações
- Diaspora 20091008120306moptcDocumento55 páginasDiaspora 20091008120306moptcrlucas7295Ainda não há avaliações
- Infra EroDocumento90 páginasInfra EroIzunome Mesiánica ChileAinda não há avaliações
- Projeto de Um Sistema de Voo Automático para Veículos Aéreos Não Tripulados em Fase de Voo de CruzeiroDocumento81 páginasProjeto de Um Sistema de Voo Automático para Veículos Aéreos Não Tripulados em Fase de Voo de Cruzeiromoises siqueiraAinda não há avaliações
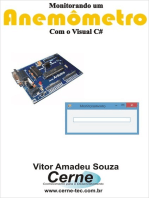
- Desenvolvendo Um Supervisório Em Vc# Com Gauge Angular Para Monitoramento De Anemômetro Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gauge Angular Para Monitoramento De Anemômetro Programado No ArduinoAinda não há avaliações
- Monografia - Sistema de Monitoramento Automotivo Remoto - V - FinalDocumento86 páginasMonografia - Sistema de Monitoramento Automotivo Remoto - V - Finalgustavo luizAinda não há avaliações
- Monitorando Anemômetro No Pic Com Sintetizador De Voz Programado No Visual C#No EverandMonitorando Anemômetro No Pic Com Sintetizador De Voz Programado No Visual C#Ainda não há avaliações
- Monitorando Anemômetro No Arduino Com Sintetizador De Voz Programado No PythonNo EverandMonitorando Anemômetro No Arduino Com Sintetizador De Voz Programado No PythonAinda não há avaliações
- Livro FlowDocumento104 páginasLivro FlowPedro Ayala CastilloAinda não há avaliações
- Manual Ana MatarageDocumento122 páginasManual Ana MatarageGivaldoAinda não há avaliações
- Sistema de Controlo para Um Amostrador de Edna SubaquáticoDocumento48 páginasSistema de Controlo para Um Amostrador de Edna SubaquáticoMiguel FaroAinda não há avaliações
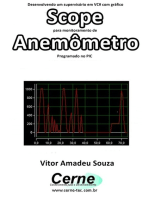
- Desenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Anemômetro Programado No PicNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Anemômetro Programado No PicAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Anemômetro Programado No PicNo EverandDesenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Anemômetro Programado No PicAinda não há avaliações
- Análise Do Dimensionamento Terminal de Passageiros Aeroporto Internacional Hercílio LuzDocumento107 páginasAnálise Do Dimensionamento Terminal de Passageiros Aeroporto Internacional Hercílio LuzJustino TiagoAinda não há avaliações
- Monitorando Um Anemômetro Com O Android Programado No App InventorNo EverandMonitorando Um Anemômetro Com O Android Programado No App InventorAinda não há avaliações
- Disser Ta CaoDocumento117 páginasDisser Ta CaoArnaldo JúniorAinda não há avaliações
- Monitorando Anemômetro No Arduino Com Sintetizador De Voz Programado No Visual C#No EverandMonitorando Anemômetro No Arduino Com Sintetizador De Voz Programado No Visual C#Ainda não há avaliações
- Planta Didática de Instrumentação e ControleDocumento76 páginasPlanta Didática de Instrumentação e ControleAMINTA MANZANILLA100% (2)
- Monitorando Anemômetro No Pic Com Sintetizador De Voz Programado No Visual BasicNo EverandMonitorando Anemômetro No Pic Com Sintetizador De Voz Programado No Visual BasicAinda não há avaliações
- Monitorando Anemômetro No Pic Com Sintetizador De Voz Programado No PythonNo EverandMonitorando Anemômetro No Pic Com Sintetizador De Voz Programado No PythonAinda não há avaliações
- Aeroportos Infraestrutura Aeroportuária Arranjo Físico Terminais de Passageiros Configurações Conexões Intermodalidade.Documento54 páginasAeroportos Infraestrutura Aeroportuária Arranjo Físico Terminais de Passageiros Configurações Conexões Intermodalidade.Ronny LimaAinda não há avaliações
- Instrumentacao de Controle de ProcessoDocumento39 páginasInstrumentacao de Controle de ProcessoLetícia CostaAinda não há avaliações
- Apostila Atmega8Documento74 páginasApostila Atmega8João Pedro SilvaAinda não há avaliações
- Medidor Do Ângulo de AtaqueDocumento181 páginasMedidor Do Ângulo de AtaqueDouglas PonteloAinda não há avaliações
- Monitorando Um Anemômetro Com O Pic E Android Programado No App InventorNo EverandMonitorando Um Anemômetro Com O Pic E Android Programado No App InventorAinda não há avaliações
- Document 5 D 1 F 8 D 7701125Documento68 páginasDocument 5 D 1 F 8 D 7701125Maicon KerwaldAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Anemômetro Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Anemômetro Programado No ArduinoAinda não há avaliações
- Posto de GasolinaDocumento99 páginasPosto de GasolinaFabi Perini100% (4)
- Quadcopter APMDocumento131 páginasQuadcopter APMHenrique FelipettoAinda não há avaliações
- Master Zeyu MaDocumento124 páginasMaster Zeyu MaHậu PhạmAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Amônia Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Amônia Programado No ArduinoAinda não há avaliações
- Artigo Versão COBEFDocumento6 páginasArtigo Versão COBEFlukedayzAinda não há avaliações
- Robô Batimétrico: Universidade Positivo Núcleo de Ciências Exatas E Tecnológicas Curso de Engenharia Da ComputaçãoDocumento79 páginasRobô Batimétrico: Universidade Positivo Núcleo de Ciências Exatas E Tecnológicas Curso de Engenharia Da ComputaçãoAlôMundoAinda não há avaliações
- Dimensionamento de Água FriaDocumento70 páginasDimensionamento de Água FriaJorge CordeiroAinda não há avaliações
- Labeee Tutorial PDFDocumento42 páginasLabeee Tutorial PDFDébora CostaAinda não há avaliações
- ALBERTO EES2 Final PDFDocumento13 páginasALBERTO EES2 Final PDFMarta WateAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vc# Com Gauge Angular Para Monitoramento De Amônia Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gauge Angular Para Monitoramento De Amônia Programado No ArduinoAinda não há avaliações
- Monitorando Um Anemômetro Com O Pic E Visual BasicNo EverandMonitorando Um Anemômetro Com O Pic E Visual BasicAinda não há avaliações
- TCC Eder Nogueira AraujoDocumento37 páginasTCC Eder Nogueira AraujorodattoAinda não há avaliações
- Monitorando Anemômetro No Arduino Com Sintetizador De Voz Programado No Visual BasicNo EverandMonitorando Anemômetro No Arduino Com Sintetizador De Voz Programado No Visual BasicAinda não há avaliações
- Sv87 Kit Usermanual BRDocumento68 páginasSv87 Kit Usermanual BRRicardo SilvaAinda não há avaliações
- Estudo Dos Impactos Da Aplicação Do Conceito Paperless CockpitDocumento59 páginasEstudo Dos Impactos Da Aplicação Do Conceito Paperless CockpitThiago ProençaAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Amônia Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Amônia Programado No ArduinoAinda não há avaliações
- Alvaro Maciel SchmidtghghgDocumento45 páginasAlvaro Maciel SchmidtghghgJohnny FernandesAinda não há avaliações
- Medeiros 2004Documento470 páginasMedeiros 2004Hermiro da Cruz Pessoa JuniorAinda não há avaliações
- NR 17 - Ergonomia Cognitiva Como Fator de RiscoDocumento67 páginasNR 17 - Ergonomia Cognitiva Como Fator de RiscoCPSSTAinda não há avaliações
- MOBILIDADE AÉREA URBANA eVTOLS E SUA INFRAESTRUTURA EM GRANDES CENTROS URBANOSDocumento45 páginasMOBILIDADE AÉREA URBANA eVTOLS E SUA INFRAESTRUTURA EM GRANDES CENTROS URBANOSRafael SoaresAinda não há avaliações
- Sop Golv 2018 PDFDocumento131 páginasSop Golv 2018 PDFnaovoamonosenecaAinda não há avaliações
- A1055 - Manual de Produto - Rev 10Documento85 páginasA1055 - Manual de Produto - Rev 10Thiago LimaAinda não há avaliações
- Manual Básico Do EES (V. 1.0)Documento67 páginasManual Básico Do EES (V. 1.0)WilliamAinda não há avaliações
- 159753, 10225 - Texto Do ArtigoDocumento15 páginas159753, 10225 - Texto Do ArtigoLucas AvilaAinda não há avaliações
- 159753, 10225 - Texto Do ArtigoDocumento15 páginas159753, 10225 - Texto Do ArtigoLucas AvilaAinda não há avaliações
- 7.1 Preposizioni ArticolateDocumento1 página7.1 Preposizioni ArticolateLucas AvilaAinda não há avaliações
- CINEMÁTICA Lista 1 Aulas 1 A 5Documento8 páginasCINEMÁTICA Lista 1 Aulas 1 A 5Geferson NascimentoAinda não há avaliações
- ATIVIDADE 10.12.2020 Karollaynne 1 T02Documento3 páginasATIVIDADE 10.12.2020 Karollaynne 1 T02Karollaynne Oliveira SantosAinda não há avaliações
- 2 - Dilatação Térmica Dos SólidosDocumento27 páginas2 - Dilatação Térmica Dos SólidosMaicon Humberto De AguiarAinda não há avaliações
- Guia de Estudo C6H20Documento10 páginasGuia de Estudo C6H20UniversoTemporalAinda não há avaliações
- DANFOSS Refrigeração IndustrialDocumento136 páginasDANFOSS Refrigeração IndustrialleticiaAinda não há avaliações
- Drapper Guia Rápido IIIDocumento4 páginasDrapper Guia Rápido IIIVinicius Santos Agronomia100% (1)
- Cat Duracell WebDocumento55 páginasCat Duracell WebRafael FreitasAinda não há avaliações
- Mec PT IntercambiavelDocumento28 páginasMec PT IntercambiavelErick PiresAinda não há avaliações
- PD6Documento19 páginasPD6Daniel cabezas gonzaloAinda não há avaliações
- Lista4 Impulso Quantidade de Movimento ContinuaçãoDocumento14 páginasLista4 Impulso Quantidade de Movimento ContinuaçãoDaiane CardosoAinda não há avaliações
- Matemática: Esse Material É Parte Integrante Do Aulas Particulares On-Line Do IESDE BRASIL S/ADocumento24 páginasMatemática: Esse Material É Parte Integrante Do Aulas Particulares On-Line Do IESDE BRASIL S/APatrick MartinsAinda não há avaliações
- Slide de Maquinas e EquipamentosDocumento42 páginasSlide de Maquinas e EquipamentosAnderson TabordaAinda não há avaliações
- Manual Motobomba Sibrape BAP Fit e BAPDocumento16 páginasManual Motobomba Sibrape BAP Fit e BAPmareuniceAinda não há avaliações
- Frequencímetro de Alta Resolução DVM13MFC2Documento6 páginasFrequencímetro de Alta Resolução DVM13MFC2Antonio C D FerreiraAinda não há avaliações
- Prevencao de IncendiosDocumento76 páginasPrevencao de IncendiosSimone SegattoAinda não há avaliações
- APRESENTAÇÃO DE COMPRESSORES PETROBRÁS Rev cimatec-PARTE2Documento86 páginasAPRESENTAÇÃO DE COMPRESSORES PETROBRÁS Rev cimatec-PARTE2Toniase Guimaraes BarrosAinda não há avaliações
- Manual de Instruções GX - Guia RapidoDocumento24 páginasManual de Instruções GX - Guia RapidoFranciany PontesAinda não há avaliações
- Tecnologia AlienígenaDocumento4 páginasTecnologia AlienígenaWanderley Da Ressurreição BentoAinda não há avaliações
- Geometria Analitica - UFV PDFDocumento150 páginasGeometria Analitica - UFV PDFMário MouraAinda não há avaliações
- 1 - Origem e Formação Dos Solos PDFDocumento17 páginas1 - Origem e Formação Dos Solos PDFÍcaro AlencarAinda não há avaliações
- A05-Estudo Das RetasDocumento6 páginasA05-Estudo Das RetasGustavo SalvadorAinda não há avaliações
- Atividade 3 (A3) - Revisão Da Tentativa FisicaDocumento6 páginasAtividade 3 (A3) - Revisão Da Tentativa FisicaDavid CremosinhoAinda não há avaliações
- Currículo Carlos Henrique M. Bonifácio.Documento6 páginasCurrículo Carlos Henrique M. Bonifácio.CARLOSAinda não há avaliações
- EM Regular - QuímicaDocumento18 páginasEM Regular - QuímicaAline Jacuboski BianquiAinda não há avaliações
- Provao de Bolsas Do em Afa Efomm en Questoes 2022Documento18 páginasProvao de Bolsas Do em Afa Efomm en Questoes 2022JORGINtd2Ainda não há avaliações