Você também pode gostar
- GABARITO MASTER Cálculo Diferencial e Integral III (MAD105)Documento75 páginasGABARITO MASTER Cálculo Diferencial e Integral III (MAD105)Milto Cezar Gomes100% (2)
- Algumas Provas de Matemática Da ENDocumento72 páginasAlgumas Provas de Matemática Da ENPaula SouzaAinda não há avaliações
- Avaliação 1º Ano Função Do 2 GrauDocumento1 páginaAvaliação 1º Ano Função Do 2 GrauAntonioCarlosPereiraPereira100% (1)
- Relações Métricas Na Circunferência 1Documento3 páginasRelações Métricas Na Circunferência 1OrielSantana60% (5)
- Função Do 2 GrauDocumento3 páginasFunção Do 2 GrauLeandro CostaAinda não há avaliações
- CEFET-RJ - 2019 - 2 Fase - Critérios Redação + Gab. Mat.Documento11 páginasCEFET-RJ - 2019 - 2 Fase - Critérios Redação + Gab. Mat.Danielle MaiaAinda não há avaliações
- Apostila de TermodiâmicaDocumento145 páginasApostila de TermodiâmicaAngel Amado Recio RecioAinda não há avaliações
- Tutorial Mapa de Susceptibilidade Erosiva ArcGISDocumento4 páginasTutorial Mapa de Susceptibilidade Erosiva ArcGISEfrero RochyAinda não há avaliações
- Prova PB Matematica 2ano Manha 1bimDocumento7 páginasProva PB Matematica 2ano Manha 1bimrosangela100% (7)
- Prova 11 Engenheiro de Equipamentos J Nior El TricaDocumento21 páginasProva 11 Engenheiro de Equipamentos J Nior El TricaLarissa MouraAinda não há avaliações
- 2018Fev20-Econ-Gest (1) Matematica IDocumento2 páginas2018Fev20-Econ-Gest (1) Matematica Itfarodrigues98Ainda não há avaliações
- Modelo Ramsey Cass Koopmans Macro IVDocumento10 páginasModelo Ramsey Cass Koopmans Macro IVraphael guimaraesAinda não há avaliações
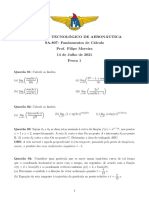
- Questões de Limites e DerivadasDocumento3 páginasQuestões de Limites e DerivadasFilipe MoreiraAinda não há avaliações
- Lista de Exerccios 01Documento3 páginasLista de Exerccios 01Syllas AguiarAinda não há avaliações
- Resolucao Insper 2009 Sem1 Analise Quant Logica q1 10Documento10 páginasResolucao Insper 2009 Sem1 Analise Quant Logica q1 10siernanAinda não há avaliações
- Gab2 L2 AjusteDocumento6 páginasGab2 L2 AjusteFrancisco Luiz Martins BezerraAinda não há avaliações
- FT 05 Trigonometria e GeometriaDocumento8 páginasFT 05 Trigonometria e Geometriaricardo antunesAinda não há avaliações
- Simulado 1 - EFOMMDocumento16 páginasSimulado 1 - EFOMMJoão ArgibaiAinda não há avaliações
- Aulas 13 A 15Documento5 páginasAulas 13 A 15jose rodrigoAinda não há avaliações
- Macro - Aula 6Documento42 páginasMacro - Aula 6André Cordeiro ValérioAinda não há avaliações
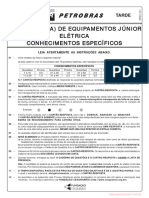
- Tarde: Leia Atentamente As Instruções AbaixoDocumento21 páginasTarde: Leia Atentamente As Instruções Abaixogustavo françaAinda não há avaliações
- Matematica 2008 FinalDocumento20 páginasMatematica 2008 Finalguardarpdf matlabAinda não há avaliações
- P1 - Cálculo Numérico, Unifesp - Engenharia QuímicaDocumento4 páginasP1 - Cálculo Numérico, Unifesp - Engenharia QuímicabfsantoroAinda não há avaliações
- Listadeterminantes (I)Documento2 páginasListadeterminantes (I)Flávia Gonçalves FernandesAinda não há avaliações
- Função QuadráticaDocumento4 páginasFunção QuadráticavnevesAinda não há avaliações
- Cálculo C - Lista de Exercícios 01 - Revisão Cálculo A e BDocumento2 páginasCálculo C - Lista de Exercícios 01 - Revisão Cálculo A e BEduardo AraujoAinda não há avaliações
- Teste 5 MatematicaDocumento2 páginasTeste 5 MatematicaMariana100% (1)
- Petrobras 2010Documento21 páginasPetrobras 2010Greison Pereira RibeiroAinda não há avaliações
- Funcoes TrigonometricasDocumento29 páginasFuncoes TrigonometricasHenrik SilvaAinda não há avaliações
- PF Gabarito 2019 1Documento4 páginasPF Gabarito 2019 1Ana FigueiredoAinda não há avaliações
- Cópia de ListaCordasDocumento5 páginasCópia de ListaCordasisabellymatos07Ainda não há avaliações
- Método Da SecanteDocumento4 páginasMétodo Da SecantethiagoAinda não há avaliações
- Teoria ExponencialDocumento2 páginasTeoria ExponencialMateus Almeida FreitasAinda não há avaliações
- Matemática - Exercícios Resolvidos - Vestibular1 - IDocumento11 páginasMatemática - Exercícios Resolvidos - Vestibular1 - IMatemática Mathclassy80% (5)
- Função - Parte 4Documento8 páginasFunção - Parte 4YOUTUBER PLAYERAinda não há avaliações
- Simulado 1 Básico (PRIMEIRA FASE) PDFDocumento10 páginasSimulado 1 Básico (PRIMEIRA FASE) PDFPedro FranklinAinda não há avaliações
- Slides 01 Sist Tempo Discreto Parte1Documento32 páginasSlides 01 Sist Tempo Discreto Parte1Cecília de Freitas MoraisAinda não há avaliações
- Uso Do Polinomio Interpolador de LagrangeDocumento6 páginasUso Do Polinomio Interpolador de LagrangecleuberAinda não há avaliações
- Derivadas: 1.1. Algumas Fun C OesDocumento18 páginasDerivadas: 1.1. Algumas Fun C OesMaria SilvaAinda não há avaliações
- MATEMÁTICA 1 - Aula 07 - Função ExponencialDocumento3 páginasMATEMÁTICA 1 - Aula 07 - Função ExponencialStefani NascimentoAinda não há avaliações
- Função Do 2º Grau: Teoria e Exercícios.0Documento4 páginasFunção Do 2º Grau: Teoria e Exercícios.0Monica FigAinda não há avaliações
- Método Das Bandas 1994Documento15 páginasMétodo Das Bandas 1994AFrancisco198100% (1)
- Ficha EsaDocumento2 páginasFicha EsaLucas AlexandreAinda não há avaliações
- Lista Exercicio CompletaDocumento17 páginasLista Exercicio CompletaVinícius Moreira SouzaAinda não há avaliações
- AULA4 - 5-INT - DEF - ÁREAS-2020.2 (Apostila)Documento5 páginasAULA4 - 5-INT - DEF - ÁREAS-2020.2 (Apostila)Jonathan Cantini BackAinda não há avaliações
- Universidade Federal de São João Del Rei Departamento de Engenharia MecânicaDocumento51 páginasUniversidade Federal de São João Del Rei Departamento de Engenharia MecânicaluizAinda não há avaliações
- Lista E - PME2371 - Suspensão VeicularDocumento4 páginasLista E - PME2371 - Suspensão VeicularandreAinda não há avaliações
- Modelo K-OmegaDocumento30 páginasModelo K-OmegaTakasaki MisakiAinda não há avaliações
- Solucao T3Documento2 páginasSolucao T3Marcello HenriqueAinda não há avaliações
- DeterminantesDocumento3 páginasDeterminantesCamila Nunes VieiraAinda não há avaliações
- 6listaExerciciosElemMbasica BCC2019Documento4 páginas6listaExerciciosElemMbasica BCC2019Heitor Santos ReisAinda não há avaliações
- Exec 2bim Trigono Graficos Equacoes InequacoesDocumento5 páginasExec 2bim Trigono Graficos Equacoes Inequacoesapi-3701497Ainda não há avaliações
- Maratona 2010 1Documento2 páginasMaratona 2010 1deathdinoAinda não há avaliações
- 2ºteste V1 ADocumento2 páginas2ºteste V1 Aricardo antunesAinda não há avaliações
- Regras Integral (Primitivação)Documento5 páginasRegras Integral (Primitivação)zbonfimAinda não há avaliações
- Lista de Exercicios 2 AnoDocumento10 páginasLista de Exercicios 2 Anorerina kiAinda não há avaliações
- P1b 2010 GABARITODocumento7 páginasP1b 2010 GABARITOHigor MarquesAinda não há avaliações
- Planilha EsPCEx - Sheet1Documento2 páginasPlanilha EsPCEx - Sheet1diπzAinda não há avaliações
- Como Fazer Portao Aluminio (Correr)Documento41 páginasComo Fazer Portao Aluminio (Correr)Suzy GuiAinda não há avaliações
- Falando Um Pouco Sobre Estatística - BasicoDocumento38 páginasFalando Um Pouco Sobre Estatística - BasicoTanisa PrietoAinda não há avaliações
- Texto Sobre Transcrição e PlágioDocumento4 páginasTexto Sobre Transcrição e PlágioMarilene OlivierAinda não há avaliações
- Fluxograma - Engenharia Software: Faculdade Unb GamaDocumento1 páginaFluxograma - Engenharia Software: Faculdade Unb GamaThiago GomesAinda não há avaliações
- A Cientificidade Do DireitoDocumento35 páginasA Cientificidade Do DireitomanoeljgAinda não há avaliações
- Elizeu Prova 6 Ano 2019Documento4 páginasElizeu Prova 6 Ano 20191208nynna100% (2)
- Aula 6 - Meia Parcela Ou Parcela ReduzidaDocumento4 páginasAula 6 - Meia Parcela Ou Parcela Reduzidajuliana mendesAinda não há avaliações
- Entre A Matemática e A Dança - O RibatejoDocumento4 páginasEntre A Matemática e A Dança - O RibatejoSamuel ZaratimAinda não há avaliações
- Apostila - Eixos e ArvoresDocumento7 páginasApostila - Eixos e ArvoresMarcos VinicyusAinda não há avaliações
- Quantificadores Licao4Documento11 páginasQuantificadores Licao4Wander LuizAinda não há avaliações
- Trabalho Oficial IDocumento7 páginasTrabalho Oficial IFernandoAinda não há avaliações
- Masmorra - Lista para Logica para Exrcicio de Logica de ProgramaçãoDocumento1 páginaMasmorra - Lista para Logica para Exrcicio de Logica de ProgramaçãoLuiz HenriqueAinda não há avaliações
- Fundações e Contenções - Aula 3Documento23 páginasFundações e Contenções - Aula 3Everton Fontes Xavier100% (1)
- Igaal Vetores - Parte IDocumento41 páginasIgaal Vetores - Parte IHabeenkiiAinda não há avaliações
- Estrutura Condicional EXTRADocumento28 páginasEstrutura Condicional EXTRAdiorrane david vieiraAinda não há avaliações
- DidáticaDocumento67 páginasDidáticaJorge Pilal RodriguesAinda não há avaliações
- Colapsoato TuneissoloDocumento7 páginasColapsoato Tuneissoloc_domAinda não há avaliações
- Provas de Auxiliar de Serviços GeraisDocumento4 páginasProvas de Auxiliar de Serviços Geraisoculto4441Ainda não há avaliações
- Livro - George BooleDocumento322 páginasLivro - George Boolemaicon gottardoAinda não há avaliações
- Uniasselvi - Avaliação II 9691637Documento3 páginasUniasselvi - Avaliação II 9691637Diogo CastilhoAinda não há avaliações
- Acuracidade de Estoque - TreinamentoDocumento42 páginasAcuracidade de Estoque - TreinamentoDea GuedesAinda não há avaliações
- Controle de Perdas TEORIADocumento11 páginasControle de Perdas TEORIAkassiusazevedoAinda não há avaliações
- Termometro de Gás Formulario de Análise e Interpretação Dos DadosDocumento13 páginasTermometro de Gás Formulario de Análise e Interpretação Dos DadosGutembergAinda não há avaliações
- NBR 16046-3Documento8 páginasNBR 16046-3Miguel BaldisseriAinda não há avaliações
- Trabalho Matemática Discreta PRONTODocumento38 páginasTrabalho Matemática Discreta PRONTOWaldir Escouto PereiraAinda não há avaliações