Você também pode gostar
- Projeto e fabricação de rosca única para extrusora laboratorialDocumento75 páginasProjeto e fabricação de rosca única para extrusora laboratorialGean Carlos SaugoAinda não há avaliações
- O XYZ das Impressão 3D: Tudo o que você gostaria de saber sobre Impressão 3D e não tinha a quem perguntarNo EverandO XYZ das Impressão 3D: Tudo o que você gostaria de saber sobre Impressão 3D e não tinha a quem perguntarAinda não há avaliações
- Aplicação Do Indicador OEE Um Estudo de Caso em Impressoras 3DDocumento61 páginasAplicação Do Indicador OEE Um Estudo de Caso em Impressoras 3DMaely NailaneAinda não há avaliações
- Trabalho MQTT - CLPDocumento60 páginasTrabalho MQTT - CLPrafael.rochaAinda não há avaliações
- Melhoria em máquina de impressão 3D através de sensor de falhas e estudo de temperatura ótimaDocumento48 páginasMelhoria em máquina de impressão 3D através de sensor de falhas e estudo de temperatura ótimaAlex da SilvaAinda não há avaliações
- Impressora 3d Engenharia MecânicaDocumento20 páginasImpressora 3d Engenharia MecânicaCaio RafaelAinda não há avaliações
- Melhorias em Impressora 3D SLA/DLPDocumento43 páginasMelhorias em Impressora 3D SLA/DLPBrenda CarolineAinda não há avaliações
- Centro Universitário Campo Limpo Paulista - Unifaccamp Engenharia MecânicaDocumento42 páginasCentro Universitário Campo Limpo Paulista - Unifaccamp Engenharia MecânicaEmília Cesário ElyAinda não há avaliações
- Tecnologias de impressão 3DDocumento19 páginasTecnologias de impressão 3DCarolinaDireitoAinda não há avaliações
- Aplicação da impressão 3D na fabricação de protótipos da indústria automotivaDocumento41 páginasAplicação da impressão 3D na fabricação de protótipos da indústria automotivaBárbaraAinda não há avaliações
- Prototipagem de Prótese para Dedo Via Escâner E Impressão 3DDocumento52 páginasPrototipagem de Prótese para Dedo Via Escâner E Impressão 3Dlivyal640Ainda não há avaliações
- Importância da impressão 3D na engenhariaDocumento27 páginasImportância da impressão 3D na engenhariaAntonio NetoAinda não há avaliações
- Demandas ergonômicas em plantas petroquímicasDocumento171 páginasDemandas ergonômicas em plantas petroquímicasalexmarquestsmsAinda não há avaliações
- Implantação de programa de manutenção em empresa de usinagemDocumento58 páginasImplantação de programa de manutenção em empresa de usinagemAlex Rougé100% (1)
- Leticia Del Caro RodriguesDocumento46 páginasLeticia Del Caro Rodrigueslysyk1Ainda não há avaliações
- Universidade Tecnológica Federal Do ParanáDocumento39 páginasUniversidade Tecnológica Federal Do ParanáLuiz BertaziAinda não há avaliações
- Retrofitting da Alimentação de PapelDocumento71 páginasRetrofitting da Alimentação de PapelBruno OliveiraAinda não há avaliações
- Fundamentação TeóricaDocumento43 páginasFundamentação TeóricaThomasSpiesAinda não há avaliações
- Automatização de testes e integração com MESDocumento40 páginasAutomatização de testes e integração com MESAnonymous 687oIjLSTNAinda não há avaliações
- Vilson Kaio Pinheiro Relatorio de EstagiDocumento24 páginasVilson Kaio Pinheiro Relatorio de EstagiLuan De Lima RodriguesAinda não há avaliações
- TCCDocumento87 páginasTCCcaue gomesAinda não há avaliações
- Apostila - A Arte de Aprender LinguagemC Com Mikroc PRO For PIC PDFDocumento40 páginasApostila - A Arte de Aprender LinguagemC Com Mikroc PRO For PIC PDFLukas AlvesAinda não há avaliações
- Melhoria na Assistência TécnicaDocumento68 páginasMelhoria na Assistência TécnicaVanderlei MastrocolloAinda não há avaliações
- Portfolio Arranjo fisico e layoutDocumento11 páginasPortfolio Arranjo fisico e layout224712018Ainda não há avaliações
- Grupo - 1 - Memória Descritiva - Rui - GonçalvesDocumento43 páginasGrupo - 1 - Memória Descritiva - Rui - GonçalvesDavid CaçadorAinda não há avaliações
- Automatização na marcenariaDocumento37 páginasAutomatização na marcenariaGislaine Franca Cordeiro de SouzaAinda não há avaliações
- Impressora 3D de Baixo CustoDocumento61 páginasImpressora 3D de Baixo CustoSimone G. GoularteAinda não há avaliações
- Rev7 - Tcii - Condicionador de Ar Com Filtro UvcDocumento65 páginasRev7 - Tcii - Condicionador de Ar Com Filtro UvcGabriel OliveiraAinda não há avaliações
- FT1.12PB.7249-DianaGarcia 1Documento15 páginasFT1.12PB.7249-DianaGarcia 1Diana GarciaAinda não há avaliações
- Fresadora - MONOGRAFIA v1Documento40 páginasFresadora - MONOGRAFIA v1Josemar MedeirosAinda não há avaliações
- Manual PlotterDocumento16 páginasManual PlotterIAGO VENÂNCIO NASCIMENTOAinda não há avaliações
- TP02 2003 1ivanrballockvfDocumento62 páginasTP02 2003 1ivanrballockvfapiai74Ainda não há avaliações
- Instrumentacao 12a PDFDocumento301 páginasInstrumentacao 12a PDFRonaldo TourinhoAinda não há avaliações
- Desenvolvimento de Sistema de Gestão VeterinárioDocumento45 páginasDesenvolvimento de Sistema de Gestão VeterinárioCauê AraujoAinda não há avaliações
- Uso Do FMEA para Análise Do Sistema de Detecção de Falhas em Uma Prensa Na Indústria de Latas de AlumínioDocumento115 páginasUso Do FMEA para Análise Do Sistema de Detecção de Falhas em Uma Prensa Na Indústria de Latas de AlumíniosarapererAinda não há avaliações
- MONOGRAFIA DesenvolvimentoSimuladorOfflineDocumento32 páginasMONOGRAFIA DesenvolvimentoSimuladorOfflinetiago.trad6924Ainda não há avaliações
- Carlos Roberto Correa Maia - A Eliminacao de Desperdicios em Uma Fabrica de Paineis Eletrico (Um Estudo de Caso)Documento42 páginasCarlos Roberto Correa Maia - A Eliminacao de Desperdicios em Uma Fabrica de Paineis Eletrico (Um Estudo de Caso)KASSIA PAZAinda não há avaliações
- Melhoria de layout industrialDocumento115 páginasMelhoria de layout industrialKliver de SáAinda não há avaliações
- Implementação de Produção Enxuta com DMAICDocumento82 páginasImplementação de Produção Enxuta com DMAICneombaAinda não há avaliações
- FTEC-ProdutividadeDocumento41 páginasFTEC-Produtividadea_v_e_i_a100% (1)
- MONOGRAFIA ConstruçãoImpressora3DDocumento73 páginasMONOGRAFIA ConstruçãoImpressora3Dcesar alexandreAinda não há avaliações
- Injetora PDFDocumento78 páginasInjetora PDFTiago Santos100% (1)
- Projeto Final CNC 10Documento106 páginasProjeto Final CNC 10Rafael PinhoAinda não há avaliações
- 2011 BrunoRibeiroRaulino TCCDocumento152 páginas2011 BrunoRibeiroRaulino TCCYan CostaAinda não há avaliações
- PIM3SEMESTREDocumento34 páginasPIM3SEMESTREDênis VlogsAinda não há avaliações
- Impressora 3 DbaixocustoDocumento60 páginasImpressora 3 DbaixocustoSilas Reginaldo da SilvaAinda não há avaliações
- Blender3d ManualDocumento29 páginasBlender3d Manualmcaalmeida2512100% (1)
- Manual de Instruções Do Software Constructo ContaDocumento299 páginasManual de Instruções Do Software Constructo Contacarlosjr1969Ainda não há avaliações
- Sistema de estante automatizadaDocumento53 páginasSistema de estante automatizadaJoão Paulo SouzaAinda não há avaliações
- A 2 - ROBERVAL - Aaaaaapostila de INVENTOR 2018Documento65 páginasA 2 - ROBERVAL - Aaaaaapostila de INVENTOR 2018Fábio PneuAinda não há avaliações
- Universidade Federal de Santa Catarina Centro Tecnológico Departamento de Automação E Sistemas Engenharia de Controle E AutomaçãoDocumento77 páginasUniversidade Federal de Santa Catarina Centro Tecnológico Departamento de Automação E Sistemas Engenharia de Controle E AutomaçãoLeonardo FaveroAinda não há avaliações
- DISSERTACAO ElderVintena PDFDocumento107 páginasDISSERTACAO ElderVintena PDFLeo QuirinoAinda não há avaliações
- TCC-IMTCDocumento42 páginasTCC-IMTCpkneipAinda não há avaliações
- TCC Marcelo Pineda Vieira Prensa ExcentricaDocumento60 páginasTCC Marcelo Pineda Vieira Prensa ExcentricaNablaFiAinda não há avaliações
- Parafusadeira AutomatizadaDocumento17 páginasParafusadeira AutomatizadaphfdsantosAinda não há avaliações
- TCC - Ana Gabriela Reis AtualizadoDocumento49 páginasTCC - Ana Gabriela Reis AtualizadoANA GABRIELAAinda não há avaliações
- 2014 Programacao SaiaDocumento79 páginas2014 Programacao Saiaj_ccunhaAinda não há avaliações
- Modelo e simula layout fabrilDocumento47 páginasModelo e simula layout fabrilLipe MartinsAinda não há avaliações
- Aplicações de Ferramentas Computacionais Gráficas Na Contrução Do LayoutDocumento113 páginasAplicações de Ferramentas Computacionais Gráficas Na Contrução Do LayoutDiedison RamosAinda não há avaliações
- Viabilidade Econômica de Sistemas Fotovoltaicos No BrasilDocumento42 páginasViabilidade Econômica de Sistemas Fotovoltaicos No BrasilTiago DuarteAinda não há avaliações
- Energia FotovoltaicoDocumento368 páginasEnergia FotovoltaicoLEORINX1100% (35)
- 24872Documento9 páginas24872stp@sapo.ptAinda não há avaliações
- Dimensionamento de Um Sistema Fotovoltaico Residencial Considerando A Sazonalidade Anual Da Incidência Solar Na Cidade de Sapucaia Do Sul-RsDocumento11 páginasDimensionamento de Um Sistema Fotovoltaico Residencial Considerando A Sazonalidade Anual Da Incidência Solar Na Cidade de Sapucaia Do Sul-RsWILLIAM ROGER CARVALHO GOMESAinda não há avaliações
- A Universidade e Suas Relações Com o Estado e A SociedadeDocumento66 páginasA Universidade e Suas Relações Com o Estado e A SociedadeRaul A. CarlosAinda não há avaliações
- Manual EletronDocumento40 páginasManual EletronWILLIAM ROGER CARVALHO GOMESAinda não há avaliações
- 5 passos para conseguir passagem para Disney por R$ 356Documento35 páginas5 passos para conseguir passagem para Disney por R$ 356Vinicius SantanaAinda não há avaliações
- Digibee Construir X ComprarDocumento10 páginasDigibee Construir X ComprarDaniel RipariAinda não há avaliações
- Criação e configuração de elementos visuais em telasDocumento4 páginasCriação e configuração de elementos visuais em telasRyan HarrisAinda não há avaliações
- Modelo de Termo de Referencia Inexigibilidade 8666 - 2022Documento14 páginasModelo de Termo de Referencia Inexigibilidade 8666 - 2022MarceloPizziXPatriciaPizziAinda não há avaliações
- ABESE - Cartilha Do ConsumidorDocumento16 páginasABESE - Cartilha Do ConsumidorEUNIVALDO BEZERRA100% (1)
- 40pfg5509 78 Dfu BRPDocumento75 páginas40pfg5509 78 Dfu BRPBanana poAinda não há avaliações
- MANUAL PORTAL DO ALUNO - Alunos 1.5Documento6 páginasMANUAL PORTAL DO ALUNO - Alunos 1.5Adilson FreireAinda não há avaliações
- Guia Do Evento - Cozinha de Gente Moderna - AGO 23Documento9 páginasGuia Do Evento - Cozinha de Gente Moderna - AGO 23Marta FranciscoAinda não há avaliações
- CAS+Gesture+Drawing+Resources en PTDocumento2 páginasCAS+Gesture+Drawing+Resources en PTRenê Vieira GenroAinda não há avaliações
- 1 Lista de Exercícios de Sistemas Digitais IDocumento8 páginas1 Lista de Exercícios de Sistemas Digitais IMarco Tulio SoaresAinda não há avaliações
- LGPD emDocumento30 páginasLGPD emJorgeMelloFeiraAinda não há avaliações
- Como Copiar Arquivos Protegidos Do PDFDocumento2 páginasComo Copiar Arquivos Protegidos Do PDFCherylAinda não há avaliações
- Revisão exercícios fixação CDocumento5 páginasRevisão exercícios fixação CVictor Gabriel MagalhãesAinda não há avaliações
- Passo A Passo MEP EletricaDocumento41 páginasPasso A Passo MEP EletricaGilmar Coelho RamosAinda não há avaliações
- React Native MVCDocumento66 páginasReact Native MVCDoubt NatorAinda não há avaliações
- TIC 7 Fichanº1Documento2 páginasTIC 7 Fichanº1Teresa RodriguesAinda não há avaliações
- Manual Conectado Aluno UCSDocumento14 páginasManual Conectado Aluno UCSEduardo Skaschinski de OliveiraAinda não há avaliações
- Engenharia TelecomunicacoesDocumento687 páginasEngenharia Telecomunicacoesharoldogarcia100% (1)
- Celulares e redes sociais: impactos na sociedadeDocumento2 páginasCelulares e redes sociais: impactos na sociedadeAna Paula Consentino FigueiredoAinda não há avaliações
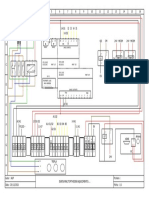
- Schematic - Vision & HeatingDocumento1 páginaSchematic - Vision & HeatingddddddAinda não há avaliações
- Configurando 01v96Documento5 páginasConfigurando 01v96Frederico MilhomemAinda não há avaliações
- Construindo uma disciplina no AVA UEMG em 7 etapasDocumento1 páginaConstruindo uma disciplina no AVA UEMG em 7 etapasViviane Raposo PimentaAinda não há avaliações
- (DICA) Corrigir Erro Tela Azul Com Win32k.sysDocumento10 páginas(DICA) Corrigir Erro Tela Azul Com Win32k.sysfabiano morais diasAinda não há avaliações
- Novas funções do IC Consig AppDocumento19 páginasNovas funções do IC Consig AppMegacredAinda não há avaliações
- Modelos, métodos e técnicas de engenharia de softwareDocumento49 páginasModelos, métodos e técnicas de engenharia de softwareedquelAinda não há avaliações
- Documentação Python 3.10Documento19 páginasDocumentação Python 3.10Lucivaldo LimaAinda não há avaliações
- Modelos de especificação de softwareDocumento7 páginasModelos de especificação de softwareNeymar Siqueira DellaretiAinda não há avaliações
- Spark HDInsight Real-Time Analytics com PythonDocumento5 páginasSpark HDInsight Real-Time Analytics com PythonguidhuAinda não há avaliações
- Pague Esse Boleto Com PIX. É Seguro e Imediato!Documento1 páginaPague Esse Boleto Com PIX. É Seguro e Imediato!Geovanne ReisAinda não há avaliações
- Academia SAP Abap - InternaDocumento239 páginasAcademia SAP Abap - InternaVinicius Rosa67% (3)
- Eletricista Residencial E PredialNo EverandEletricista Residencial E PredialNota: 3 de 5 estrelas3/5 (1)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Introdução a Data Science: Algoritmos de Machine Learning e métodos de análiseNo EverandIntrodução a Data Science: Algoritmos de Machine Learning e métodos de análiseAinda não há avaliações
- Dimensionamento e Planejamento de Máquinas e Implementos AgrícolasNo EverandDimensionamento e Planejamento de Máquinas e Implementos AgrícolasNota: 1 de 5 estrelas1/5 (2)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Motores automotivos: evolução, manutenção e tendênciasNo EverandMotores automotivos: evolução, manutenção e tendênciasNota: 5 de 5 estrelas5/5 (1)
- Python e mercado financeiro: Programação para estudantes, investidores e analistasNo EverandPython e mercado financeiro: Programação para estudantes, investidores e analistasNota: 5 de 5 estrelas5/5 (3)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (25)
- Inteligência artificial: Análise de dados e inovação para iniciantesNo EverandInteligência artificial: Análise de dados e inovação para iniciantesAinda não há avaliações
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- O Que Todo Atirador Precisa Saber Sobre BalísticaNo EverandO Que Todo Atirador Precisa Saber Sobre BalísticaNota: 5 de 5 estrelas5/5 (1)
- Gerenciamento da rotina do trabalho do dia-a-diaNo EverandGerenciamento da rotina do trabalho do dia-a-diaNota: 5 de 5 estrelas5/5 (2)
- Estruturas de Dados: Domine as práticas essenciais em C, Java, C#, Python e JavaScriptNo EverandEstruturas de Dados: Domine as práticas essenciais em C, Java, C#, Python e JavaScriptAinda não há avaliações
- Manual Prático do Plano de Projeto (6a. edição): utilizando o PMBOK GuideNo EverandManual Prático do Plano de Projeto (6a. edição): utilizando o PMBOK GuideNota: 5 de 5 estrelas5/5 (1)
- Manual Do Proprietário - Para Operação, Uso E Manutenção Das Edificações Residenciais.No EverandManual Do Proprietário - Para Operação, Uso E Manutenção Das Edificações Residenciais.Nota: 5 de 5 estrelas5/5 (1)
- Email marketing eficaz: Como conquistar e fidelizar clientes com uma newsletterNo EverandEmail marketing eficaz: Como conquistar e fidelizar clientes com uma newsletterNota: 5 de 5 estrelas5/5 (1)