Você também pode gostar
- Aula Red Dados Inf Mest 2S 2019Documento78 páginasAula Red Dados Inf Mest 2S 2019Antonio GabrielAinda não há avaliações
- Aula IB InfDocumento53 páginasAula IB InfCarlos Souto Dos Santos FilhoAinda não há avaliações
- 23-Teorema Fundamental Do CálculoDocumento27 páginas23-Teorema Fundamental Do CálculoTiagoAinda não há avaliações
- Trabalho Matriz Expo Nen CialDocumento3 páginasTrabalho Matriz Expo Nen CialBreno Cesar Mattos Cruz TrindadeAinda não há avaliações
- Estatisticas SumariasDocumento14 páginasEstatisticas SumariasAntonio GabrielAinda não há avaliações
- Teorema Do Ponto Fixo de Banach - Jonas R. Moreira GomesDocumento4 páginasTeorema Do Ponto Fixo de Banach - Jonas R. Moreira GomesSamuelAinda não há avaliações
- Pontofixo PDFDocumento4 páginasPontofixo PDFnaldovarelaAinda não há avaliações
- Cap1 PDFDocumento12 páginasCap1 PDFmatecaguiAinda não há avaliações
- Abordagem GirsanovDocumento4 páginasAbordagem GirsanovMoisésRodriguesAinda não há avaliações
- Solucionario Elon Lages Vol. 2Documento9 páginasSolucionario Elon Lages Vol. 2Edwin Quispe CondoriAinda não há avaliações
- Limites, Caminhos Diferenciáveis, Cálculo Diferencial de CaminhosDocumento5 páginasLimites, Caminhos Diferenciáveis, Cálculo Diferencial de CaminhosPablo JoséAinda não há avaliações
- Cálculo 1 - Aula 5Documento37 páginasCálculo 1 - Aula 5barna84Ainda não há avaliações
- Seção 9 HomeomorfismosDocumento3 páginasSeção 9 HomeomorfismosPablo JoséAinda não há avaliações
- Integracao Numerica 2Documento16 páginasIntegracao Numerica 2Rodrigo AraújoAinda não há avaliações
- Teorema de PicardDocumento107 páginasTeorema de PicardPoliana da RochaAinda não há avaliações
- O Anel H0 (X) - 14-06-2022Documento4 páginasO Anel H0 (X) - 14-06-2022tasi11Ainda não há avaliações
- Prova 3 Prob 3Documento3 páginasProva 3 Prob 3Lucas AmaralAinda não há avaliações
- Métodos Numéricos - 7 - Integração NuméricaDocumento38 páginasMétodos Numéricos - 7 - Integração NuméricaAdrian BenevidesAinda não há avaliações
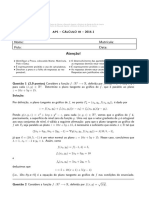
- Nome: Matr Icula: Polo: Data:: Aten C Ao!Documento4 páginasNome: Matr Icula: Polo: Data:: Aten C Ao!Glaucia PiresAinda não há avaliações
- Gabarito ExtraMuros Doutorado 2017 PDFDocumento4 páginasGabarito ExtraMuros Doutorado 2017 PDFLejzerCastroAinda não há avaliações
- Gabarito ExtraMuros Doutorado 2017 PDFDocumento4 páginasGabarito ExtraMuros Doutorado 2017 PDFLejzerCastroAinda não há avaliações
- Gabarito ExtraMuros Doutorado 2017 PDFDocumento4 páginasGabarito ExtraMuros Doutorado 2017 PDFLejzerCastroAinda não há avaliações
- Lista Cálculo NuméricoDocumento3 páginasLista Cálculo NuméricoBárbara CarvalhoAinda não há avaliações
- Lista 04Documento2 páginasLista 04Rodolfo BramontAinda não há avaliações
- Aula DerivadasDocumento6 páginasAula DerivadasKaísa MaraAinda não há avaliações
- Resolucao Lista3 FGM TCLDocumento3 páginasResolucao Lista3 FGM TCLTainá CabalheiroAinda não há avaliações
- O Teorema de Lee-YangDocumento11 páginasO Teorema de Lee-YangBernardo MaiaAinda não há avaliações
- Pauta - Prova - 3 - 2016 - 1 - Sexta MOD2Documento4 páginasPauta - Prova - 3 - 2016 - 1 - Sexta MOD2Carlos EduardoAinda não há avaliações
- Slides Aula14 - BayesDocumento15 páginasSlides Aula14 - BayesRafael DKAinda não há avaliações
- Lista IVDocumento4 páginasLista IVdavitufAinda não há avaliações
- Polinômio de TaylorDocumento5 páginasPolinômio de TaylorRobson SantosAinda não há avaliações
- Aula 06 - Miscelânea Sobre Raízes de Polinômios I PDFDocumento24 páginasAula 06 - Miscelânea Sobre Raízes de Polinômios I PDFWander LuizAinda não há avaliações
- Notas - Sem1 Junho Parte1Documento5 páginasNotas - Sem1 Junho Parte1Jéssica FerreiraAinda não há avaliações
- Aula 03Documento10 páginasAula 03Valdir GiselyAinda não há avaliações
- Gabaritos, Lista 3Documento5 páginasGabaritos, Lista 3Arthur FreitasAinda não há avaliações
- Inferencia EstatisticaDocumento16 páginasInferencia EstatisticaWellington José Leite Da SilvaAinda não há avaliações
- Teorema Dos Numeros PrimosDocumento1 páginaTeorema Dos Numeros PrimosNelson JuniorAinda não há avaliações
- Gabarito Exercício 15 Lista 1.3 de Análise IIDocumento2 páginasGabarito Exercício 15 Lista 1.3 de Análise IIAlexandre DieguezAinda não há avaliações
- Aula4 - Prof Valentin SiskoDocumento7 páginasAula4 - Prof Valentin SiskoAna CarolinaAinda não há avaliações
- 2 Lista de Cálculo de 2023Documento1 página2 Lista de Cálculo de 2023Logeda SilvaAinda não há avaliações
- CE227 - Aulas - Bayesiana2Documento3 páginasCE227 - Aulas - Bayesiana2Juliano S. IgnacioAinda não há avaliações
- Solucao Prova Mestrado 2022 2Documento4 páginasSolucao Prova Mestrado 2022 2Caio ClarindoAinda não há avaliações
- Aula 15Documento10 páginasAula 15Caio NegrãoAinda não há avaliações
- Atividade 1Documento10 páginasAtividade 1Rodrigo FernandoAinda não há avaliações
- Lista 2Documento10 páginasLista 2wilsonbarbosa0212Ainda não há avaliações
- Lista00 Revisao Algebra LinearDocumento2 páginasLista00 Revisao Algebra LinearBianca sousaAinda não há avaliações
- Artigo Elementos Da MatemáticaDocumento9 páginasArtigo Elementos Da MatemáticaErivan Sampaio CarneiroAinda não há avaliações
- Regras L HospitalDocumento4 páginasRegras L Hospitalnagato-painAinda não há avaliações
- Mae5704 Aula9Documento17 páginasMae5704 Aula9Anderson TrindadeAinda não há avaliações
- Série de TaylorDocumento6 páginasSérie de TaylorTemudjin KhanAinda não há avaliações
- Padrao de RespostaDocumento4 páginasPadrao de Respostaerivan grangeiroAinda não há avaliações
- AF Lista 04 2018 1 Resolvida PDFDocumento19 páginasAF Lista 04 2018 1 Resolvida PDFRenata CostaAinda não há avaliações
- Analise Na Reta - Notas de Aula (Rafael Budaibes) (2011)Documento57 páginasAnalise Na Reta - Notas de Aula (Rafael Budaibes) (2011)Fernando Freitas AlvesAinda não há avaliações
- Teorema de Noether - TCCDocumento3 páginasTeorema de Noether - TCCTadeu FernandoAinda não há avaliações
- Lista 4Documento3 páginasLista 4Kalil SoaresAinda não há avaliações
- Lista 1 Resolvida - Análise IIDocumento9 páginasLista 1 Resolvida - Análise IIVinicius Pinheiro BentoAinda não há avaliações
- Lista 5Documento10 páginasLista 5Germano AbudAinda não há avaliações
- Calculo 1 V 2020 Aula 10Documento6 páginasCalculo 1 V 2020 Aula 10johão BagrielAinda não há avaliações
- 8 Integral DefinidoDocumento67 páginas8 Integral Definidorodrigo silvaAinda não há avaliações
- Atividade Discursiva de Matemática InstrumentalDocumento4 páginasAtividade Discursiva de Matemática InstrumentalLeandro SilvaAinda não há avaliações
- AP1 - Álgebra LinearDocumento3 páginasAP1 - Álgebra LinearThiago MedeirosAinda não há avaliações
- Emai 4 Ano Aluno Vol.2Documento34 páginasEmai 4 Ano Aluno Vol.2lareth100% (2)
- Definição de Grupo PDFDocumento12 páginasDefinição de Grupo PDFroddvelosoAinda não há avaliações
- Relatório Lei de Snell Lab IVDocumento4 páginasRelatório Lei de Snell Lab IVAugusto LimaAinda não há avaliações
- Como Trabalhar Com o OpenGLDocumento382 páginasComo Trabalhar Com o OpenGLadilson9230Ainda não há avaliações
- Pilha CosmicaDocumento17 páginasPilha CosmicaKojji Narimatsu100% (1)
- Tu Te Tornas Eternamente Responsável Por Aquilo Que CativasDocumento3 páginasTu Te Tornas Eternamente Responsável Por Aquilo Que CativasMarlene Pereira LimaAinda não há avaliações
- Algebra Linear Simulado 1 e 2Documento6 páginasAlgebra Linear Simulado 1 e 2luciovicenteAinda não há avaliações
- Controle GeométricoDocumento18 páginasControle GeométricoRenan FigueiredoAinda não há avaliações
- 1 Ano B ConjuntosDocumento4 páginas1 Ano B ConjuntosBruno CostaAinda não há avaliações
- Nomenclatura TipográficaDocumento12 páginasNomenclatura TipográficaAlexandre Mota100% (2)
- Lista de Exercícios de Binômio de NewtonDocumento3 páginasLista de Exercícios de Binômio de NewtonDaniel Sombra100% (2)
- Leitura de NumerosDocumento20 páginasLeitura de NumerosMaria De Fátima FerreiraAinda não há avaliações
- Aula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)Documento54 páginasAula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)camilaeng23Ainda não há avaliações
- Guia Definitivo Procentagem para ConcursosDocumento17 páginasGuia Definitivo Procentagem para ConcursosTatiana SantosAinda não há avaliações
- PsicomotricidadeDocumento107 páginasPsicomotricidademercury1946100% (2)
- Livro Estatística II CarinaDocumento51 páginasLivro Estatística II CarinaRoberto Alves0% (1)
- A Miséria Do MundoDocumento4 páginasA Miséria Do Mundosgalva19Ainda não há avaliações
- Estados Múltiplos Do SerDocumento10 páginasEstados Múltiplos Do SerAbdullah HakimAinda não há avaliações
- Lista de Exercicios CepDocumento30 páginasLista de Exercicios CepWesley WaltersAinda não há avaliações
- Guia de Programação - VLC - HVAC FC 101-Doc - MG11CD28Documento261 páginasGuia de Programação - VLC - HVAC FC 101-Doc - MG11CD28g3qwsfAinda não há avaliações
- Asep1-2018 1Documento83 páginasAsep1-2018 1renatofcortes100% (1)
- 1°teste Alfamat2009Documento15 páginas1°teste Alfamat2009Nied Belem100% (1)
- Tabela - Numeros RacionaisDocumento8 páginasTabela - Numeros RacionaisSandra Pedra50% (2)
- Capitulo 2 - Regressão Linear SimplesDocumento45 páginasCapitulo 2 - Regressão Linear SimplesandreiaAinda não há avaliações
- Mat - Ger - 3 - Integrais DuplosDocumento3 páginasMat - Ger - 3 - Integrais DuplosMauro AbnnerAinda não há avaliações
- Aula 5 Circuitos Elétricos II - Circuitos Trifásicos EquilibradosDocumento26 páginasAula 5 Circuitos Elétricos II - Circuitos Trifásicos EquilibradosfelipebozoAinda não há avaliações
- Aula 06 - Cálculo II - Efomm 2024Documento79 páginasAula 06 - Cálculo II - Efomm 2024mateusconthAinda não há avaliações
- Trabalho - 8º Ano (4º Bimestre)Documento2 páginasTrabalho - 8º Ano (4º Bimestre)Guilherme Ribeiro SouzaAinda não há avaliações