Você também pode gostar
- Lista 12Documento5 páginasLista 12José PaivaAinda não há avaliações
- Limites e DerivadasDocumento12 páginasLimites e DerivadaskikotiAinda não há avaliações
- Comprimento Arco PDFDocumento5 páginasComprimento Arco PDFArthur DaherAinda não há avaliações
- 13.1 Funções Vetoriais e Curvas Espaciais (Teoria)Documento25 páginas13.1 Funções Vetoriais e Curvas Espaciais (Teoria)Vanessa RodriguesAinda não há avaliações
- Listas 2 e 3 Calculo1Documento6 páginasListas 2 e 3 Calculo1Danrlley MacielAinda não há avaliações
- L2 Cal2Documento4 páginasL2 Cal2José Henrique de Mattos DraegerAinda não há avaliações
- Braquistócrona SOLUÇÃODocumento9 páginasBraquistócrona SOLUÇÃOMauricio SVAinda não há avaliações
- Aula 1 - Calculo Vetorial AplicadoDocumento23 páginasAula 1 - Calculo Vetorial AplicadoLívia PinheiroAinda não há avaliações
- Gabarito ENQ 2013 2 RevisadoDocumento7 páginasGabarito ENQ 2013 2 RevisadoAntonio Marcos FerreiraAinda não há avaliações
- Função Quadrática Ou Função Polinomial Do Segundo GrauDocumento6 páginasFunção Quadrática Ou Função Polinomial Do Segundo GrauJéssica Córdova De Pariz100% (1)
- Curva de AgnesiDocumento8 páginasCurva de Agnesiwilliansouza.v95Ainda não há avaliações
- Inclinação Da Reta Tangente À CurvaDocumento11 páginasInclinação Da Reta Tangente À CurvaAntonio Eduardo Assis AmorimAinda não há avaliações
- Lista 7Documento5 páginasLista 7DeivisonGomesAinda não há avaliações
- Aplicacao Integral - Primeiras AulasDocumento69 páginasAplicacao Integral - Primeiras AulasJúlio CésarAinda não há avaliações
- Modulo 2 PDFDocumento77 páginasModulo 2 PDFEduardo SilvaAinda não há avaliações
- Orientações e Exercícios - Cálculo IV - 1a Parte-2017Documento15 páginasOrientações e Exercícios - Cálculo IV - 1a Parte-2017Frederico Reis Marques de BritoAinda não há avaliações
- Art19 Vol11 SBM PMO 2023Documento11 páginasArt19 Vol11 SBM PMO 2023Fernando LopesAinda não há avaliações
- DerivadasDocumento8 páginasDerivadasadrianomlealAinda não há avaliações
- EDO's de Primeira OrdemDocumento14 páginasEDO's de Primeira OrdemLeonardo PinheiroAinda não há avaliações
- 3 Lista PDFDocumento3 páginas3 Lista PDFMatheus RosaAinda não há avaliações
- Lista 3Documento10 páginasLista 3Germano AbudAinda não há avaliações
- A Post I La 20082013Documento39 páginasA Post I La 20082013Thaís Gomes VenâncioAinda não há avaliações
- Af2 15er CorDocumento4 páginasAf2 15er CorContaAinda não há avaliações
- Curvas Continuas emDocumento10 páginasCurvas Continuas emKuka Da Cesa JoaquimAinda não há avaliações
- Lista #5 ? Derivadas e Aplicac?o? Es Da Diferencial e DerivadasDocumento4 páginasLista #5 ? Derivadas e Aplicac?o? Es Da Diferencial e DerivadasFabio Meister100% (1)
- 051 Apostila de Geometria Analitica FiliDocumento47 páginas051 Apostila de Geometria Analitica FiliAdilson TicianoAinda não há avaliações
- Como Captar o Movimento de Uma Bola de Futebol Chutada Pelo GoleiroDocumento7 páginasComo Captar o Movimento de Uma Bola de Futebol Chutada Pelo GoleiroBruna Karla CastroAinda não há avaliações
- Capitulo 24Documento24 páginasCapitulo 24Dorival Gimenes FilhoAinda não há avaliações
- Estudando A Reta No Plano CartesianoDocumento19 páginasEstudando A Reta No Plano CartesianoJean SousaAinda não há avaliações
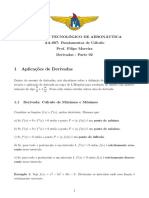
- Derivada - Parte 2Documento6 páginasDerivada - Parte 2Filipe MoreiraAinda não há avaliações
- Aplicações de Integrais CurvilíneosDocumento9 páginasAplicações de Integrais CurvilíneosAlex Alberto Q GingaAinda não há avaliações
- Capitulo 2Documento15 páginasCapitulo 2dougnovaesAinda não há avaliações
- GABARITO MASTER Cálculo Diferencial e Integral III (MAD105)Documento75 páginasGABARITO MASTER Cálculo Diferencial e Integral III (MAD105)Milto Cezar Gomes100% (2)
- Introdução Ao Cálculo Integral PDFDocumento4 páginasIntrodução Ao Cálculo Integral PDFEli dos Anjos RodriguesAinda não há avaliações
- Felipe Acker - Lista 2Documento18 páginasFelipe Acker - Lista 2Zair HenriqueAinda não há avaliações
- DiofantoDocumento47 páginasDiofantoÁgatha LuanyAinda não há avaliações
- Lugares Geométricos, Condições e VetoresDocumento10 páginasLugares Geométricos, Condições e VetoresInês LinoAinda não há avaliações
- CG3 Reta DDA BresenhamDocumento45 páginasCG3 Reta DDA BresenhamHenrique MillerAinda não há avaliações
- Problemas Resolvidos de EletromagnetismoDocumento56 páginasProblemas Resolvidos de EletromagnetismoJoeme AlvesAinda não há avaliações
- Complexo Scap 1Documento33 páginasComplexo Scap 1Patty CoelhoAinda não há avaliações
- Lista9 PDFDocumento2 páginasLista9 PDFQuímica 2018/1Ainda não há avaliações
- A Desigualdade IsoperimetricaDocumento9 páginasA Desigualdade IsoperimetricaMARCUS VINÍCIUS DE MORAIS CHAGASAinda não há avaliações
- Calculo 1 - Capitulo 5 PDFDocumento34 páginasCalculo 1 - Capitulo 5 PDFFagner JoséAinda não há avaliações
- Calculo 2Documento4 páginasCalculo 2Rejane BezerraAinda não há avaliações
- Física II - Desafio 4Documento3 páginasFísica II - Desafio 4Daniel BetoretAinda não há avaliações
- Lista 2Documento10 páginasLista 2wilsonbarbosa0212Ainda não há avaliações
- Rotacao XDocumento4 páginasRotacao Xmar.granjeiro.henriqueAinda não há avaliações
- Aula - ..Matemática Função QuadráticaDocumento6 páginasAula - ..Matemática Função QuadráticaMara MaraAinda não há avaliações
- Funçoes de Varias VariaveisDocumento13 páginasFunçoes de Varias VariaveisAlessandro BrognoliAinda não há avaliações
- Cap.4 IntegraisDocumento8 páginasCap.4 IntegraisBruno WallacyAinda não há avaliações
- Proposta de Teste - 11.º AnoDocumento5 páginasProposta de Teste - 11.º AnoBassleaderBassleaderAinda não há avaliações
- Ga Cap 06 PDFDocumento11 páginasGa Cap 06 PDFAnthonny Gabryell LimaAinda não há avaliações
- Exercíciosobjetivos-Matemática-Exercícios Sobre Função Quadrática e Inequação Do 2° Grau-24-06-2021Documento8 páginasExercíciosobjetivos-Matemática-Exercícios Sobre Função Quadrática e Inequação Do 2° Grau-24-06-2021Ana Julya LopesAinda não há avaliações
- SCeT 2023-Programacao Completa ATUALIZADO 24102023Documento9 páginasSCeT 2023-Programacao Completa ATUALIZADO 24102023JulyAinda não há avaliações
- Lista 10Documento5 páginasLista 10JulyAinda não há avaliações
- Atestado Matricula 202230304679Documento1 páginaAtestado Matricula 202230304679JulyAinda não há avaliações
- GA Aula 1Documento8 páginasGA Aula 1JulyAinda não há avaliações
- c1 Lista01Documento1 páginac1 Lista01JulyAinda não há avaliações
- GA Aula 2Documento10 páginasGA Aula 2JulyAinda não há avaliações
- Plano de Curso 2018.1Documento32 páginasPlano de Curso 2018.1Lucas AndradeAinda não há avaliações
- c1 Aula12Documento11 páginasc1 Aula12JulyAinda não há avaliações
- c1 Lista01Documento1 páginac1 Lista01JulyAinda não há avaliações
- c1 Lista12Documento1 páginac1 Lista12JulyAinda não há avaliações
- BoletoDocumento1 páginaBoletoWallace SouzaAinda não há avaliações
- Ficha de Personagem DD 5e Completc3a1vel PTDocumento3 páginasFicha de Personagem DD 5e Completc3a1vel PTUthan SantosAinda não há avaliações
- Certificado Proex 92764113Documento1 páginaCertificado Proex 92764113JulyAinda não há avaliações
- Aula 1 HidroCarbonetos UFRNDocumento27 páginasAula 1 HidroCarbonetos UFRNJoão Pedro BragaAinda não há avaliações
- Apostila de Laborato769rioDocumento31 páginasApostila de Laborato769rioJulyAinda não há avaliações
- Bradesco Celular: Poup Facil-Depos A Partir 4/5/12Documento4 páginasBradesco Celular: Poup Facil-Depos A Partir 4/5/12JulyAinda não há avaliações
- Santander - Boleto 4 PDFDocumento1 páginaSantander - Boleto 4 PDFStefani Mendes de JesusAinda não há avaliações
- The Happiest Apocalypse On Earth PT BRDocumento104 páginasThe Happiest Apocalypse On Earth PT BRJulyAinda não há avaliações
- Tds Ficha - Tecnica Preg - Facil Rev.06 17docDocumento2 páginasTds Ficha - Tecnica Preg - Facil Rev.06 17docMarcosAinda não há avaliações
- Tesao Vaca05Documento7 páginasTesao Vaca05dsfsdfsAinda não há avaliações
- Modelo de Relatório FinalDocumento16 páginasModelo de Relatório FinalJota PachecoAinda não há avaliações
- Portugues 12o Resumos Importantes para o ExameDocumento35 páginasPortugues 12o Resumos Importantes para o ExameManuel SousaAinda não há avaliações
- Wilo Sistemas de Bombagem 2009-03-30Documento252 páginasWilo Sistemas de Bombagem 2009-03-30CavamogoAinda não há avaliações
- Atividade Cultura Brasileira 1 TEXTOSDocumento1 páginaAtividade Cultura Brasileira 1 TEXTOSRafael FrancoAinda não há avaliações
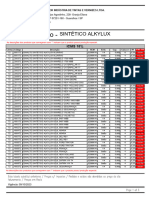
- Alkylux - ICMS 18Documento3 páginasAlkylux - ICMS 18Kenidi BiazottoAinda não há avaliações
- Pratica de MacrografiaDocumento11 páginasPratica de Macrografiavinicius olivera sofiaAinda não há avaliações
- Como Se Há de Haver o Senhor - AntonilDocumento2 páginasComo Se Há de Haver o Senhor - AntonilPlinio LabriolaAinda não há avaliações
- A Corrente Humanista e A Corrente TranspessoalDocumento49 páginasA Corrente Humanista e A Corrente TranspessoalWanderlei GCAinda não há avaliações
- Aula-2-Termodinâmica-e-Equilibrio Experimental - Tensão SuperficialDocumento5 páginasAula-2-Termodinâmica-e-Equilibrio Experimental - Tensão SuperficialEstefani SousaAinda não há avaliações
- 24 Junho Tabela MIRAI VILA EMA - 24JUN - V01 - OkDocumento12 páginas24 Junho Tabela MIRAI VILA EMA - 24JUN - V01 - OkMagali Costa Dos PassosAinda não há avaliações
- Espaços Motores de Fluxos Mundiais (12.º)Documento10 páginasEspaços Motores de Fluxos Mundiais (12.º)profgeofernando100% (2)
- Armanda Maria Loureiro FigueiredoDocumento225 páginasArmanda Maria Loureiro FigueiredoMaria SilvaAinda não há avaliações
- MANUAL CR110A DoseBadge Short OperatingDocumento72 páginasMANUAL CR110A DoseBadge Short Operatingfandrade005Ainda não há avaliações
- Apresentação - Mancais para RolamentosDocumento34 páginasApresentação - Mancais para RolamentosPricyla ChwistAinda não há avaliações
- Rito Da Dedicação de Uma IgrejaDocumento9 páginasRito Da Dedicação de Uma Igrejastorealcateia22Ainda não há avaliações
- Quando A Rede Vira Um VícioDocumento2 páginasQuando A Rede Vira Um VícioKellySantanaAinda não há avaliações
- CoagulogramaDocumento27 páginasCoagulogramaJessica Teixeira100% (1)
- Magias de ClérigoDocumento29 páginasMagias de ClérigoLuiz Fernando FagundesAinda não há avaliações
- PSM 2000Documento5 páginasPSM 2000guilhermeapa799Ainda não há avaliações
- Exp9 GP Ficha Avaliacao 5Documento4 páginasExp9 GP Ficha Avaliacao 5Vera Sá0% (1)
- Lista de Exercícios 9 - Matemática - 4º BimestreDocumento4 páginasLista de Exercícios 9 - Matemática - 4º BimestreLuís Felipe Peterlini75% (4)
- Kemilly, Laura e EmilyDocumento15 páginasKemilly, Laura e EmilyPaula Elizangela Soares PereiraAinda não há avaliações
- Bergeret (1998) Psicologia Patolà Gica (Caps Sobre As Estruturas)Documento45 páginasBergeret (1998) Psicologia Patolà Gica (Caps Sobre As Estruturas)Daisy IvyAinda não há avaliações
- Levedo de Cerveja - Benefícios e Onde Comprar em Promoção!Documento1 páginaLevedo de Cerveja - Benefícios e Onde Comprar em Promoção!L.A OliveiraAinda não há avaliações
- A Inpiração e A Autoridade Das EscriturasDocumento2 páginasA Inpiração e A Autoridade Das Escriturasapi-3861555100% (1)
- Toyota Automatic Transmission A340 Series. Repair Instruction - Page 8Documento11 páginasToyota Automatic Transmission A340 Series. Repair Instruction - Page 8Carlos André BodybuilderAinda não há avaliações
- RelatorioDocumento3 páginasRelatorioLaura Maia AntunesAinda não há avaliações
- Relatório Medidas e IncertezasDocumento9 páginasRelatório Medidas e IncertezasLeonardo A. RuschAinda não há avaliações