Você também pode gostar
- Escala de Vulnerabilidade ... Stresse No Trabalho (Documento19 páginasEscala de Vulnerabilidade ... Stresse No Trabalho (Lenisa Veiga100% (1)
- Prova 7 º Ano Matematica Sme RJDocumento16 páginasProva 7 º Ano Matematica Sme RJVanessa GomesAinda não há avaliações
- Etica SocialDocumento17 páginasEtica SocialPaulo João Massora100% (2)
- Fundamentos Da Higiene OcupacionalDocumento32 páginasFundamentos Da Higiene OcupacionaljheimissonAinda não há avaliações
- Acção Humana e ValoresDocumento13 páginasAcção Humana e ValoresPaulo João Massora100% (2)
- Oração SubordinadaDocumento8 páginasOração SubordinadaPaulo João MassoraAinda não há avaliações
- Consciencia MoralDocumento10 páginasConsciencia MoralPaulo João Massora100% (1)
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Documento1 páginaDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroAinda não há avaliações
- Economia em MoçambiqueDocumento10 páginasEconomia em MoçambiquePaulo João MassoraAinda não há avaliações
- Abordagem Clássica e Neoclássica Da Administração, Um Olhar para As Contribuições de Taylor e FayolDocumento23 páginasAbordagem Clássica e Neoclássica Da Administração, Um Olhar para As Contribuições de Taylor e FayolPaulo João Massora100% (1)
- Depois da explosão como é que a terra formoDocumento3 páginasDepois da explosão como é que a terra formoPaulo João MassoraAinda não há avaliações
- Teste 1 - FísicaDocumento3 páginasTeste 1 - FísicaPaulo João MassoraAinda não há avaliações
- Ficha-III de Física (Dinâmica, Estática e Biomecânica)Documento4 páginasFicha-III de Física (Dinâmica, Estática e Biomecânica)Paulo João MassoraAinda não há avaliações
- Texto de Apoio Sobre Consequencias Da Propagacao Rectilinea Da LuzDocumento2 páginasTexto de Apoio Sobre Consequencias Da Propagacao Rectilinea Da LuzPaulo João Massora100% (1)
- Administração CientíficaDocumento11 páginasAdministração CientíficaPaulo João MassoraAinda não há avaliações
- Objectividade e Imparcialidade Nas Ciências SociaisDocumento9 páginasObjectividade e Imparcialidade Nas Ciências SociaisPaulo João Massora100% (1)
- Relações HumanasDocumento4 páginasRelações HumanasPaulo João MassoraAinda não há avaliações
- Ficha de Actividade Da 4 ClasseDocumento16 páginasFicha de Actividade Da 4 ClassePaulo João Massora100% (1)
- Pai NossoDocumento1 páginaPai NossoPaulo João MassoraAinda não há avaliações
- LetraDocumento1 páginaLetraPaulo João MassoraAinda não há avaliações
- Introdução Aos Sintomas de Doenças Do Cérebro, Da Medula Espinhal e Dos NervosDocumento1 páginaIntrodução Aos Sintomas de Doenças Do Cérebro, Da Medula Espinhal e Dos NervosPaulo João MassoraAinda não há avaliações
- Curriculum Vitae: IdentificaçãoDocumento1 páginaCurriculum Vitae: IdentificaçãoPaulo João MassoraAinda não há avaliações
- Ficha de Actividade Da 7 ClasseDocumento9 páginasFicha de Actividade Da 7 ClassePaulo João MassoraAinda não há avaliações
- A Hipertensão ArterialDocumento17 páginasA Hipertensão ArterialPaulo João MassoraAinda não há avaliações
- Formulario de Matricula para Estudantes Internos - Licenciatura 2023Documento1 páginaFormulario de Matricula para Estudantes Internos - Licenciatura 2023Paulo João MassoraAinda não há avaliações
- Algo A MaisDocumento1 páginaAlgo A MaisPaulo João MassoraAinda não há avaliações
- Evolução e Elementos Constitutivos Do Estado - TrilhanteDocumento1 páginaEvolução e Elementos Constitutivos Do Estado - TrilhantePaulo João MassoraAinda não há avaliações
- Cuidados de EnfermagemDocumento1 páginaCuidados de EnfermagemPaulo João MassoraAinda não há avaliações
- Moçambique 2012-2015Documento27 páginasMoçambique 2012-2015Paulo João MassoraAinda não há avaliações
- Ficha de Exercicios Queda-Horizontal-ObliquoDocumento8 páginasFicha de Exercicios Queda-Horizontal-ObliquoPaulo João MassoraAinda não há avaliações
- Trabalho de Tema Transversal IIDocumento11 páginasTrabalho de Tema Transversal IIPaulo João Massora100% (1)
- Trabalho Cientifico em Grupo 2, Geografia de MocambiqueDocumento2 páginasTrabalho Cientifico em Grupo 2, Geografia de MocambiquePaulo João MassoraAinda não há avaliações
- Princípios Constitucionais Sobre o Poder AdministrativoDocumento13 páginasPrincípios Constitucionais Sobre o Poder AdministrativoPaulo João MassoraAinda não há avaliações
- Dilatação TérmicaDocumento10 páginasDilatação TérmicaCarol MouraAinda não há avaliações
- Notas para Um CGE in MZDocumento10 páginasNotas para Um CGE in MZCassio RolimAinda não há avaliações
- Aula 02 - MAD - Bacteriologia IDocumento51 páginasAula 02 - MAD - Bacteriologia IGabriely CristinaAinda não há avaliações
- Mineracao Desmonte e Estabilidade de Rochas PDFDocumento79 páginasMineracao Desmonte e Estabilidade de Rochas PDFEliezer GouvêaAinda não há avaliações
- Introdução À EnzimologiaDocumento23 páginasIntrodução À EnzimologiaFrancisco Oliveira100% (2)
- Ebook Scrum ArretadoDocumento76 páginasEbook Scrum ArretadoRaimundo MoreiraAinda não há avaliações
- 6 Argumentos Teistas Contemporâneos PDFDocumento15 páginas6 Argumentos Teistas Contemporâneos PDFzwinglioAinda não há avaliações
- SO InformáticaDocumento39 páginasSO InformáticaDavi OliveiraAinda não há avaliações
- Análise Real 1Documento45 páginasAnálise Real 1Valdirene M. FerreiraAinda não há avaliações
- Termodinâmica - FÍSICA (PROF. HENRIQUE)Documento6 páginasTermodinâmica - FÍSICA (PROF. HENRIQUE)Henrique ToledoAinda não há avaliações
- Nivelamento - Eletricidade BásicaDocumento52 páginasNivelamento - Eletricidade BásicaNayara MercesAinda não há avaliações
- Componentes Do Tubo de Raios X - Fisica Da RadiologiaDocumento16 páginasComponentes Do Tubo de Raios X - Fisica Da RadiologiajacksongalvaoAinda não há avaliações
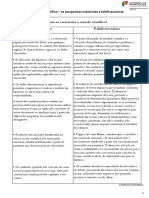
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDocumento2 páginasO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraAinda não há avaliações
- 2 Lista de Exercícios de Química Do 3o Ano (2013)Documento6 páginas2 Lista de Exercícios de Química Do 3o Ano (2013)Valério LondeAinda não há avaliações
- Rev 03Documento285 páginasRev 03William Dos SantosAinda não há avaliações
- Brousseau G. SlidesDocumento67 páginasBrousseau G. SlidesE_RCARVALHO100% (1)
- ABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesDocumento66 páginasABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesBárbara CastroAinda não há avaliações
- Atividade Prática - PPII - ELE - 1Documento4 páginasAtividade Prática - PPII - ELE - 1Henrique Marques100% (1)
- Instrumentação Virtual Com LabviewDocumento20 páginasInstrumentação Virtual Com Labviewneto_e_khelenAinda não há avaliações
- Teorema de Norton PDFDocumento3 páginasTeorema de Norton PDFMkl JeffAinda não há avaliações
- Aula 1 2 e 3 - Etiopatogênese Geral Das LesõesDocumento21 páginasAula 1 2 e 3 - Etiopatogênese Geral Das Lesõescamilla fAinda não há avaliações
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDocumento69 páginasEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROAinda não há avaliações
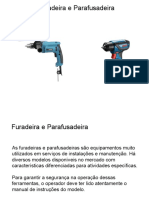
- Furadeira e ParafusadeiraDocumento9 páginasFuradeira e ParafusadeiraMarcelo LucasAinda não há avaliações
- Atividade de Recuperação Paralela 3 AnoDocumento1 páginaAtividade de Recuperação Paralela 3 AnofelupealmeidqAinda não há avaliações
- Aula 11Documento63 páginasAula 11Gustavo DominicesAinda não há avaliações