Você também pode gostar
- EncoderDocumento17 páginasEncoderRoberto VerhagenAinda não há avaliações
- LVDTsDocumento11 páginasLVDTsMaribaldo MacielAinda não há avaliações
- LVDTsDocumento11 páginasLVDTsMaribaldo MacielAinda não há avaliações
- Geradores Pulso EncodersDocumento35 páginasGeradores Pulso EncodersMateusMendonca100% (1)
- Anotação Sobre EncodersDocumento1 páginaAnotação Sobre EncodersPeterson Salles VazAinda não há avaliações
- Funcionamento LVDTDocumento9 páginasFuncionamento LVDTGeilson MarquesAinda não há avaliações
- Relatorio Contador OriginalDocumento12 páginasRelatorio Contador OriginalFofuchinho MphiliAinda não há avaliações
- Sensores robóticosDocumento16 páginasSensores robóticosLeandro SalvadorAinda não há avaliações
- Eletronica e Sistemas DigitaisDocumento12 páginasEletronica e Sistemas DigitaisAdam Gabriel SantosAinda não há avaliações
- Aula #03 - Mapas de Entradas e SaídasDocumento92 páginasAula #03 - Mapas de Entradas e SaídasJoão Marcos OliveiraAinda não há avaliações
- Encoder Incremental e Contagem RápidaDocumento19 páginasEncoder Incremental e Contagem RápidaRgerFbianAinda não há avaliações
- Sensores de velocidade e encodersDocumento5 páginasSensores de velocidade e encodersJenniferAinda não há avaliações
- Encoder Uno RoboticaDocumento20 páginasEncoder Uno RoboticaMarcio Henrique Costa MeloAinda não há avaliações
- Encoder Types GuideDocumento5 páginasEncoder Types GuideJosé Bezerra José100% (1)
- Medição de Presença com Sensores e EncoderDocumento5 páginasMedição de Presença com Sensores e EncoderLuana MeloAinda não há avaliações
- Sensores automotivos essenciaisDocumento3 páginasSensores automotivos essenciaisFabio DaronAinda não há avaliações
- Sensores Mecânicos e FotoelétricosDocumento8 páginasSensores Mecânicos e FotoelétricosAnisio ManhiçaAinda não há avaliações
- Encoder Absoluto e IncrementalDocumento5 páginasEncoder Absoluto e IncrementalVanildo Silva100% (1)
- CLP Fundamentos SensoresDocumento12 páginasCLP Fundamentos SensoresAndré MansanoAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Atividade Final - ResumoDocumento39 páginasAtividade Final - ResumoVictor PazAinda não há avaliações
- Micro - Pratica Sensor UltrassônicoDocumento8 páginasMicro - Pratica Sensor UltrassônicoTHALLES RODRIGUESAinda não há avaliações
- Monitorando O Fluxo De Massa Através Do Telegram Com Esp32 Programado Em ArduinoNo EverandMonitorando O Fluxo De Massa Através Do Telegram Com Esp32 Programado Em ArduinoAinda não há avaliações
- SensoresDocumento21 páginasSensoresjsasistemasAinda não há avaliações
- DENSEVOLVIMENTODocumento12 páginasDENSEVOLVIMENTOFernandes CastleAinda não há avaliações
- Sensores e Atuadores: Conceitos BásicosDocumento23 páginasSensores e Atuadores: Conceitos BásicosFelipe Postigo100% (1)
- Introdução à robótica - Constituintes e funcionamentoDocumento10 páginasIntrodução à robótica - Constituintes e funcionamentoMauricioAinda não há avaliações
- Monitorando O Fluxo De Massa Através Do Thinger.io Com Esp32 Programado Em ArduinoNo EverandMonitorando O Fluxo De Massa Através Do Thinger.io Com Esp32 Programado Em ArduinoAinda não há avaliações
- Circuitos controladores e registradoresDocumento5 páginasCircuitos controladores e registradoresvela clubAinda não há avaliações
- Memória 3 bits e relógio digitalDocumento19 páginasMemória 3 bits e relógio digitalGabriel PavanAinda não há avaliações
- Hardware DarioDocumento58 páginasHardware DarioLAURO AUGUSTOAinda não há avaliações
- Desenvolvendo Um Controle De Abertura De Porta Por Ultrassom Programado No ArduinoNo EverandDesenvolvendo Um Controle De Abertura De Porta Por Ultrassom Programado No ArduinoAinda não há avaliações
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte XiiiNo EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte XiiiAinda não há avaliações
- Robô seguidor de linha com sensor infravermelhoDocumento29 páginasRobô seguidor de linha com sensor infravermelhoSalviano SantosAinda não há avaliações
- Codif/Decod: transformam sinais digitaisDocumento3 páginasCodif/Decod: transformam sinais digitaisMTulioGAinda não há avaliações
- Sensores e Atuadores para Controle de ProcessosDocumento21 páginasSensores e Atuadores para Controle de ProcessosRodolfo ChagasAinda não há avaliações
- Visão geral dos problemas comuns de sinal de encoderDocumento5 páginasVisão geral dos problemas comuns de sinal de encoderM&F MaximoAinda não há avaliações
- MicrocontroladoresAula5Documento13 páginasMicrocontroladoresAula5marcos andré da silvaAinda não há avaliações
- Apostila SHP Sensores e Suas Aplicações Fevereiro de 2011 ADocumento26 páginasApostila SHP Sensores e Suas Aplicações Fevereiro de 2011 AMauricio F CamargoAinda não há avaliações
- Obtendo O Sentido E Velocidade Encoder De Quadratura Com Base No ArduinoNo EverandObtendo O Sentido E Velocidade Encoder De Quadratura Com Base No ArduinoAinda não há avaliações
- Relatório E. Digital 2 Tiago MachadoDocumento5 páginasRelatório E. Digital 2 Tiago MachadoTiago de Souza MachadoAinda não há avaliações
- Introdução A Eletronica Digital IDocumento23 páginasIntrodução A Eletronica Digital IHans DarnwellAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Hidrômetro Com PicNo EverandDesenvolvendo Um Datalogger Para Medir Hidrômetro Com PicAinda não há avaliações
- Lab de sensores de presença e encodersDocumento6 páginasLab de sensores de presença e encodersGabriel RibeiroAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Luxímetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Luxímetro Com PicAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Hidrômetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Hidrômetro Com PicAinda não há avaliações
- Monitorando Através Do Visual Basic Termômetro Com Esp32 Programado Em ArduinoNo EverandMonitorando Através Do Visual Basic Termômetro Com Esp32 Programado Em ArduinoAinda não há avaliações
- Monitorando O Fluxo De Massa Através Do Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandMonitorando O Fluxo De Massa Através Do Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Sensores 1 DifEntreSensoreTransdutorDocumento10 páginasSensores 1 DifEntreSensoreTransdutorjcedivxAinda não há avaliações
- Encoder e resolver para robótica industrialDocumento27 páginasEncoder e resolver para robótica industrialMatheus Dos santosAinda não há avaliações
- Envio De Mensagens Por Rf Com A Medição De Dinamômetro Programado No ArduinoNo EverandEnvio De Mensagens Por Rf Com A Medição De Dinamômetro Programado No ArduinoAinda não há avaliações
- EloDig Aula03Documento31 páginasEloDig Aula03Rodrigo AlvesAinda não há avaliações
- Cadeno de Geografia 8ºanoDocumento14 páginasCadeno de Geografia 8ºanoMarlene RicardoAinda não há avaliações
- 59,37 Aderir Aderir 15,52 : Quanto Tenho A Pagar? Débito Na Minha Conta A Partir deDocumento3 páginas59,37 Aderir Aderir 15,52 : Quanto Tenho A Pagar? Débito Na Minha Conta A Partir deRose Mery de Jesus GomesAinda não há avaliações
- Procedimentos Administrativos Na ExportaçãoDocumento42 páginasProcedimentos Administrativos Na ExportaçãoJonas Corassa100% (1)
- Exercicio de CircuitosDocumento2 páginasExercicio de CircuitosFrancisco SilvaAinda não há avaliações
- Tabela Anjos CabalisticosDocumento2 páginasTabela Anjos CabalisticosChico Di Sissa100% (1)
- Pratica Textual em Lingua PortuguesaDocumento5 páginasPratica Textual em Lingua PortuguesaCristiano Santos100% (2)
- Seminário de Dissertações e Teses em AndamentoDocumento91 páginasSeminário de Dissertações e Teses em AndamentoRaquel CardosoAinda não há avaliações
- In - 001 - Procedimentos Administrativo-Parte 2 - (18.12.2019) PDFDocumento63 páginasIn - 001 - Procedimentos Administrativo-Parte 2 - (18.12.2019) PDFLuiz Henrique C. LumertzAinda não há avaliações
- Os Fatores de Localização e Distribuição Das IndústriasDocumento37 páginasOs Fatores de Localização e Distribuição Das IndústriasL Antonio Savino Athayde100% (1)
- Plano de Aula Geo7 07und02Documento15 páginasPlano de Aula Geo7 07und02Cristian Chaves RodriguesAinda não há avaliações
- ENEM Simulado de Matemática BásicaDocumento14 páginasENEM Simulado de Matemática BásicaLorena Marcelino100% (1)
- Livro Secagem de MadeirasDocumento26 páginasLivro Secagem de MadeirasGreyce MaasAinda não há avaliações
- Oncocercose em animais: revisão de aspectos clínicosDocumento19 páginasOncocercose em animais: revisão de aspectos clínicosSaulo DuckyAinda não há avaliações
- Aula4 2Documento37 páginasAula4 2Lucas AssisAinda não há avaliações
- O Alicerce de Seu CasamentoDocumento4 páginasO Alicerce de Seu CasamentoRafael PaixãoAinda não há avaliações
- Garrafa Térmica Arabic Classhome 1 Litro - BrancoDocumento3 páginasGarrafa Térmica Arabic Classhome 1 Litro - Brancodaysa joanita dos santos souzaAinda não há avaliações
- Os recursos hídricos em PortugalDocumento5 páginasOs recursos hídricos em PortugalMargaridaAinda não há avaliações
- Farmacologia cardiovascular: tratamentos e mecanismos de açãoDocumento5 páginasFarmacologia cardiovascular: tratamentos e mecanismos de açãoLARA GONÇALVES DA SILVAAinda não há avaliações
- IbamaDocumento17 páginasIbamaanon_700777709Ainda não há avaliações
- Avaliar a caminhada da catequeseDocumento13 páginasAvaliar a caminhada da catequeseJoão MeloAinda não há avaliações
- Introdução à análise técnica e fundamentos básicos do mercado financeiroDocumento63 páginasIntrodução à análise técnica e fundamentos básicos do mercado financeiroRodrigo MatioliAinda não há avaliações
- Manto PeridotíticoDocumento367 páginasManto Peridotítico19-2011ºB Ana Sofia Ferreira DuarteAinda não há avaliações
- Catálogo de Acessórios AutomotivosDocumento12 páginasCatálogo de Acessórios AutomotivosNando StremelAinda não há avaliações
- Ativ. Adaptadas Ciências - 3º AnoDocumento88 páginasAtiv. Adaptadas Ciências - 3º AnoAninha Ribeiro100% (3)
- SerDocumento8 páginasSerDiego BeckAinda não há avaliações
- Frater Achad - 31 Hinos A Deusa Das Estrelas (PT)Documento18 páginasFrater Achad - 31 Hinos A Deusa Das Estrelas (PT)Caléu N. MoraesAinda não há avaliações
- Vazão e problemas de torneirasDocumento5 páginasVazão e problemas de torneirasNapoleão FreireAinda não há avaliações
- Herdeiro Rebelde - Vi KeelandDocumento247 páginasHerdeiro Rebelde - Vi KeelandEdna TorresAinda não há avaliações
- Caracterização funcional da vegetação da Barra da TijucaDocumento56 páginasCaracterização funcional da vegetação da Barra da TijucaJoão MouraAinda não há avaliações
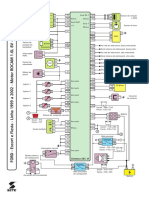
- FORD Escort Fiesta Linha 1999 A 2002 Motor ROCAM 1.6L 8V Sistema EEC VIDocumento1 páginaFORD Escort Fiesta Linha 1999 A 2002 Motor ROCAM 1.6L 8V Sistema EEC VICristianoAinda não há avaliações