Você também pode gostar
- Manual de Tecnologia Metal MecânicaDocumento209 páginasManual de Tecnologia Metal MecânicaAna Osoy100% (2)
- Capitulo 53 Monza, Ipanema, K.Documento23 páginasCapitulo 53 Monza, Ipanema, K.Gadus Morhua100% (1)
- Geometria Analitica - UFV PDFDocumento150 páginasGeometria Analitica - UFV PDFMário MouraAinda não há avaliações
- Movimento Circular UniformeDocumento8 páginasMovimento Circular Uniformesandrapacheco20140% (1)
- Manual de Instrução e Operação Do DifusorDocumento87 páginasManual de Instrução e Operação Do DifusorErick100% (2)
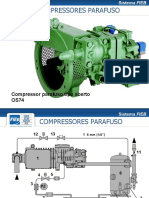
- APRESENTAÇÃO DE COMPRESSORES PETROBRÁS Rev cimatec-PARTE2Documento86 páginasAPRESENTAÇÃO DE COMPRESSORES PETROBRÁS Rev cimatec-PARTE2Toniase Guimaraes BarrosAinda não há avaliações
- Aula 10 - Dimensionamento de Condutores - ProteçãoDocumento28 páginasAula 10 - Dimensionamento de Condutores - Proteçãoaugusto felix gomes100% (1)
- Sistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesNo EverandSistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesAinda não há avaliações
- Abnt NBR 16.655 - 1Documento21 páginasAbnt NBR 16.655 - 1Ricardo MeyerAinda não há avaliações
- Relatório Sobre Movimento Retilíneo Uniforme (MRU)Documento7 páginasRelatório Sobre Movimento Retilíneo Uniforme (MRU)Americo Neto100% (1)
- Relatorio Mru e Mruv - AsdDocumento15 páginasRelatorio Mru e Mruv - AsdJuliana CarmoAinda não há avaliações
- Cfs Bma - Hidráulica de Aeronaves - 2011 (v1)Documento94 páginasCfs Bma - Hidráulica de Aeronaves - 2011 (v1)Hector NigroAinda não há avaliações
- RELATORIO MruvDocumento11 páginasRELATORIO MruvDiogo K. da SilvaAinda não há avaliações
- Relatório MRUDocumento8 páginasRelatório MRUPietro FerroAinda não há avaliações
- Aula 12 Vibrações Mecânicas - 2021 - 2 Tecnicas-de-Analise-de-VibracoesDocumento80 páginasAula 12 Vibrações Mecânicas - 2021 - 2 Tecnicas-de-Analise-de-VibracoesMarcos Freitas100% (1)
- Literatura 416e Florestal PDFDocumento49 páginasLiteratura 416e Florestal PDFViniciusCamargosAinda não há avaliações
- 1° Revisão Carlos Diniz (MRU-MRUV)Documento2 páginas1° Revisão Carlos Diniz (MRU-MRUV)homerojrfisicaAinda não há avaliações
- Atv. 04 - Transferência de Calor - SolucionárioDocumento3 páginasAtv. 04 - Transferência de Calor - Solucionárioemerson99999 UFC100% (1)
- Relatório de Física Experimental - MRUVDocumento3 páginasRelatório de Física Experimental - MRUVKyoko67% (3)
- Experimento 2 Estudo de Cinemática Utilizando Colchão de ArDocumento15 páginasExperimento 2 Estudo de Cinemática Utilizando Colchão de Arualas52Ainda não há avaliações
- Dados Da Fatura de ElectricidadeDocumento2 páginasDados Da Fatura de ElectricidadeRui FonteAinda não há avaliações
- Cinemática 9classe 2021Documento4 páginasCinemática 9classe 2021Faustina ZunguzaAinda não há avaliações
- Ficha Fisica NkobeDocumento8 páginasFicha Fisica NkobeMaucule NuboAinda não há avaliações
- Trilho de Ar 1 e 2Documento11 páginasTrilho de Ar 1 e 2Ana Célia Mantovani PagliusoAinda não há avaliações
- Mecanica FísicaDocumento17 páginasMecanica FísicaJuarés TchaikovskiAinda não há avaliações
- Glow Up 2Documento5 páginasGlow Up 2Luana GriloAinda não há avaliações
- Cinemática (Mru) E (Mruv)Documento50 páginasCinemática (Mru) E (Mruv)Franklin Sales de AraujoAinda não há avaliações
- Apontamentos Teste 1Documento4 páginasApontamentos Teste 1Miguel AmaroAinda não há avaliações
- Atividade MOVIMENTO CIRCULARESDocumento8 páginasAtividade MOVIMENTO CIRCULAREScauanwervertonlimaleiteAinda não há avaliações
- CinematicaDocumento40 páginasCinematicaRenan Marré BiazattiAinda não há avaliações
- Movimento UniformeDocumento5 páginasMovimento UniformeLuciane OliveiraAinda não há avaliações
- CienciasDocumento8 páginasCienciaskevinhobilharAinda não há avaliações
- 01 - Material de Apoio - Cinemática EscalarDocumento44 páginas01 - Material de Apoio - Cinemática EscalarSebastião Rodrigues-MouraAinda não há avaliações
- CinemáticaDocumento10 páginasCinemáticaguiverri02Ainda não há avaliações
- Tabalho de Fisica para EscolaDocumento6 páginasTabalho de Fisica para EscolaJosé Maraire Manuel ManuelAinda não há avaliações
- Cinemática - Aula 2Documento13 páginasCinemática - Aula 2Rosiel BarretoAinda não há avaliações
- CinemáticaDocumento12 páginasCinemáticaWemerson CaixêtaAinda não há avaliações
- Cinemática EscalarDocumento5 páginasCinemática EscalarthamaraAinda não há avaliações
- Relatório Experimento-MRUVDocumento4 páginasRelatório Experimento-MRUVLorhan LimaAinda não há avaliações
- Relatorio 01 - MRUVDocumento10 páginasRelatorio 01 - MRUVJackson AndradeAinda não há avaliações
- Movimento Circular UniformeDocumento18 páginasMovimento Circular Uniformeedson belitoAinda não há avaliações
- 4aula FisicaiDocumento4 páginas4aula FisicaiHelder CapitangoAinda não há avaliações
- Resumo de FísicaDocumento27 páginasResumo de FísicaMateus Teixeira de MedeirosAinda não há avaliações
- Relatorio Fundamentos Fisica MRUDocumento9 páginasRelatorio Fundamentos Fisica MRUGilsely A Carvalho LeiteAinda não há avaliações
- Relatorio2 PDFDocumento8 páginasRelatorio2 PDFGuidiOliveiraAinda não há avaliações
- Capítulo 3 - MRU e MRUA (Teoria)Documento28 páginasCapítulo 3 - MRU e MRUA (Teoria)Joaquim Guerreiro MarquesAinda não há avaliações
- Niversidade Federal de Alagoas: Campus A.C. SimõesDocumento8 páginasNiversidade Federal de Alagoas: Campus A.C. SimõesLara Danna MarquesAinda não há avaliações
- Mru AperesentaçãoDocumento15 páginasMru AperesentaçãoYasmin Silva de SouzaAinda não há avaliações
- Apostila Física EJA VIIDocumento30 páginasApostila Física EJA VIIEdipo MarquesAinda não há avaliações
- Roteiro 3 Movimento Retilíneo Uniforme MRU e Movimento Retilíneo Uniformemente Variado MRUVDocumento4 páginasRoteiro 3 Movimento Retilíneo Uniforme MRU e Movimento Retilíneo Uniformemente Variado MRUVamauri bernardoAinda não há avaliações
- Cinematica 1Documento18 páginasCinematica 1Cesar ProañoAinda não há avaliações
- Conceitos FundamentaisDocumento26 páginasConceitos FundamentaisYago SoaresAinda não há avaliações
- MUADocumento20 páginasMUAFernanda DubenczukAinda não há avaliações
- Cinemtica 1 Fsica No ENEMDocumento33 páginasCinemtica 1 Fsica No ENEMJoão PedroAinda não há avaliações
- Acelerômetro MPU 6050Documento17 páginasAcelerômetro MPU 6050Raynara PrudenteAinda não há avaliações
- Rot - Aprend - 5 - Cont - Cinemática Escalar - MRUVDocumento21 páginasRot - Aprend - 5 - Cont - Cinemática Escalar - MRUVDiego Heitor da Silva MonteiroAinda não há avaliações
- Apostila Primeiro AnoDocumento7 páginasApostila Primeiro AnoGuilherme BourscheidAinda não há avaliações
- 05 - Cinemática Da Partícula - MRU VariadoDocumento25 páginas05 - Cinemática Da Partícula - MRU VariadoVictor RomanoAinda não há avaliações
- CinemáticaDocumento8 páginasCinemáticaRafaela PazAinda não há avaliações
- Relatório Mruv - Física IDocumento6 páginasRelatório Mruv - Física IAurelioGustavoPratesAinda não há avaliações
- Relatório de Aula Prática DE FISICADocumento14 páginasRelatório de Aula Prática DE FISICAEdson TeixeiraAinda não há avaliações
- Relatório Hatsumi 2 PDFDocumento21 páginasRelatório Hatsumi 2 PDFDaniel MilchiariAinda não há avaliações
- 1 Relatorio (Experimento Velocidade)Documento13 páginas1 Relatorio (Experimento Velocidade)Gustavo LealAinda não há avaliações
- Relatório Trilho de Ar Incertezas FinalDocumento24 páginasRelatório Trilho de Ar Incertezas FinalRafael Henrique BuenoAinda não há avaliações
- Muito BomDocumento10 páginasMuito Bomsuzi1983Ainda não há avaliações
- Relatorio de Fisica - Trilho de ArDocumento4 páginasRelatorio de Fisica - Trilho de ArDenise Sayuri Oda NampoAinda não há avaliações
- Movimento Retilineo Uniformemente VariadoDocumento13 páginasMovimento Retilineo Uniformemente VariadoDimas MatosAinda não há avaliações
- Img 0552Documento1 páginaImg 0552mrn57tsw5vAinda não há avaliações
- Conformação 02Documento6 páginasConformação 02mrn57tsw5vAinda não há avaliações
- Trabalho Final Dinâmica Das MáquinasDocumento19 páginasTrabalho Final Dinâmica Das Máquinasmrn57tsw5vAinda não há avaliações
- ATIVIDADE 10.12.2020 Karollaynne 1 T02Documento3 páginasATIVIDADE 10.12.2020 Karollaynne 1 T02Karollaynne Oliveira SantosAinda não há avaliações
- Apostila Metalurgia Da Soldagem - Fissuração Na SoldagemDocumento13 páginasApostila Metalurgia Da Soldagem - Fissuração Na Soldagemjefferson santosAinda não há avaliações
- Mec PT IntercambiavelDocumento28 páginasMec PT IntercambiavelErick PiresAinda não há avaliações
- Matemática: Esse Material É Parte Integrante Do Aulas Particulares On-Line Do IESDE BRASIL S/ADocumento24 páginasMatemática: Esse Material É Parte Integrante Do Aulas Particulares On-Line Do IESDE BRASIL S/APatrick MartinsAinda não há avaliações
- 3 Lista AvançadaDocumento71 páginas3 Lista AvançadaLucas MeloAinda não há avaliações
- Lista4 Impulso Quantidade de Movimento ContinuaçãoDocumento14 páginasLista4 Impulso Quantidade de Movimento ContinuaçãoDaiane CardosoAinda não há avaliações
- 300c Limousine PDFDocumento3 páginas300c Limousine PDFHumberto Cadori FilhoAinda não há avaliações
- Currículo Carlos Henrique M. Bonifácio.Documento6 páginasCurrículo Carlos Henrique M. Bonifácio.CARLOSAinda não há avaliações
- A05-Estudo Das RetasDocumento6 páginasA05-Estudo Das RetasGustavo SalvadorAinda não há avaliações
- Relatório de Pratica 3Documento8 páginasRelatório de Pratica 3Adriano AraujoAinda não há avaliações
- Circuitos Lógicos Digitais - APRESENTAÇÃO DA MATÉRIA E CONTEÚDO PROGRAMÁTICODocumento96 páginasCircuitos Lógicos Digitais - APRESENTAÇÃO DA MATÉRIA E CONTEÚDO PROGRAMÁTICOchristian souzaAinda não há avaliações
- Guia de Estudo C6H20Documento10 páginasGuia de Estudo C6H20UniversoTemporalAinda não há avaliações
- Leituras de Fisica - MecanicaDocumento110 páginasLeituras de Fisica - MecanicaAntonio Carlos TrindadeAinda não há avaliações
- EM Regular - QuímicaDocumento18 páginasEM Regular - QuímicaAline Jacuboski BianquiAinda não há avaliações
- Realimenta C Ao de Estado: Sistemas MIMO Estimadores de Estado: Sistemas MIMODocumento30 páginasRealimenta C Ao de Estado: Sistemas MIMO Estimadores de Estado: Sistemas MIMOfpreisAinda não há avaliações
- Novas Tecnologias Analise Documental-Artigo CompletoDocumento7 páginasNovas Tecnologias Analise Documental-Artigo CompletoDavidson Leandro Silva dos SantosAinda não há avaliações
- Provao de Bolsas Do em Afa Efomm en Questoes 2022Documento18 páginasProvao de Bolsas Do em Afa Efomm en Questoes 2022JORGINtd2Ainda não há avaliações
- Fotossíntese - o Que É, Função, Etapas, Importância - Biologia NetDocumento3 páginasFotossíntese - o Que É, Função, Etapas, Importância - Biologia NetDuda FernandesAinda não há avaliações
- Analise Combinatoria RespostasDocumento12 páginasAnalise Combinatoria RespostasMARIA DA PAZ C.P.Ainda não há avaliações
- Cat Duracell WebDocumento55 páginasCat Duracell WebRafael FreitasAinda não há avaliações