Você também pode gostar
- CCNA Mod2 Cap7Documento6 páginasCCNA Mod2 Cap7ViníciusAinda não há avaliações
- Aula 2 - Paralelismo em Nível de Instruções X em Nível de Processador. Arquitetura RISC X CISC PDFDocumento61 páginasAula 2 - Paralelismo em Nível de Instruções X em Nível de Processador. Arquitetura RISC X CISC PDFMarcelo CobiasAinda não há avaliações
- Tales Paulo - Relatório de Atividades Do Grand Prix 2021Documento11 páginasTales Paulo - Relatório de Atividades Do Grand Prix 2021Tales PauloAinda não há avaliações
- Codigos Secretos para GTA San Andreas PC PDFDocumento3 páginasCodigos Secretos para GTA San Andreas PC PDFEsvetcheazy Tuga Lanez Scott100% (9)
- TCC - Industria 4.0Documento20 páginasTCC - Industria 4.0Ednardo CostaAinda não há avaliações
- PPCP - Exercícios de Planejamento AgregadoDocumento2 páginasPPCP - Exercícios de Planejamento AgregadoademirAinda não há avaliações
- Construindo Robôs Autônomos para Partidas de Futebol: O Time GuaranáDocumento9 páginasConstruindo Robôs Autônomos para Partidas de Futebol: O Time GuaranáEduardo NagabeAinda não há avaliações
- 09 Prototipacao e Testes Design de Jogos Digitais ImdDocumento31 páginas09 Prototipacao e Testes Design de Jogos Digitais ImdjoyceAinda não há avaliações
- Desenvolvimento de Um Sistema de Visao para Robo HumanoideDocumento10 páginasDesenvolvimento de Um Sistema de Visao para Robo HumanoideAndré FonsecaAinda não há avaliações
- Artigo A Respeito Do Robô SumoDocumento5 páginasArtigo A Respeito Do Robô SumoClóvisAinda não há avaliações
- Artigo Cientifico PDFDocumento4 páginasArtigo Cientifico PDFPriscila FalcãoAinda não há avaliações
- GUIA Módulo InfraestruturaDocumento62 páginasGUIA Módulo InfraestruturaEdmilson NóbregaAinda não há avaliações
- Relatório Final de RobóticaDocumento12 páginasRelatório Final de RobóticaSanderson MeloAinda não há avaliações
- Escrito - TCC 10Documento26 páginasEscrito - TCC 10Weslley DiasAinda não há avaliações
- Aula 5 Industria 40Documento14 páginasAula 5 Industria 40Fabiano Jose Fernandes RodriguesAinda não há avaliações
- Robô Cartesiano para Impressão 3D, Prototipagem E Usinagem de Materiais Com Baixa Resistência MecânicaDocumento5 páginasRobô Cartesiano para Impressão 3D, Prototipagem E Usinagem de Materiais Com Baixa Resistência MecânicaLuiza OguraAinda não há avaliações
- Robotica Sistemas Manufatura Avancada - Integracao Validacao Entre Os Ambientes Real Virtual 281633Documento6 páginasRobotica Sistemas Manufatura Avancada - Integracao Validacao Entre Os Ambientes Real Virtual 281633sebastiao miguel kinangaAinda não há avaliações
- Relatório Final Sumô2017Documento22 páginasRelatório Final Sumô2017Ana LuizaAinda não há avaliações
- Escrito - TCC-4Documento16 páginasEscrito - TCC-4Weslley DiasAinda não há avaliações
- Estudo e Desenvolvimento de Robos para CompeticaoDocumento7 páginasEstudo e Desenvolvimento de Robos para Competicaoosias.educarAinda não há avaliações
- Ebook Primeiros Passos Na Robótica e Automação Residencial V1Documento11 páginasEbook Primeiros Passos Na Robótica e Automação Residencial V1Bruno Ricardo0% (1)
- Apostila de Robótica Educacional 2014Documento9 páginasApostila de Robótica Educacional 2014Alan PaivaAinda não há avaliações
- Prototipo de Um Robo Autonomo - Sumo RobotDocumento34 páginasPrototipo de Um Robo Autonomo - Sumo RobotRobson A. Venceslau0% (1)
- Tutorial RiobotzDocumento190 páginasTutorial RiobotzMarques S. LeoAinda não há avaliações
- Desenvolvimento Do Jogo Vaquejada para Dispositivos Android Utilizando Como Motor Gráfico A Godot EngineDocumento4 páginasDesenvolvimento Do Jogo Vaquejada para Dispositivos Android Utilizando Como Motor Gráfico A Godot EngineBruno AquinoAinda não há avaliações
- Fichas Trabalho SA MEI 22 23Documento22 páginasFichas Trabalho SA MEI 22 23Achref Ben MabroukAinda não há avaliações
- Dezz TCC ConstruirMONOGRAFIA - DesenvolvimentoRobôsCapazesDocumento63 páginasDezz TCC ConstruirMONOGRAFIA - DesenvolvimentoRobôsCapazesEduarda SchwarzAinda não há avaliações
- Traducao Engenharia OficialDocumento9 páginasTraducao Engenharia Oficialapi-430517653Ainda não há avaliações
- NEWDesenvolvimento de Um Time de Futebol RoboticoDocumento6 páginasNEWDesenvolvimento de Um Time de Futebol RoboticoRobocup UfAinda não há avaliações
- TRABALHO PROJETOROBOARANHAa553913Documento3 páginasTRABALHO PROJETOROBOARANHAa553913lmlmla02Ainda não há avaliações
- Robô Humanoide Inmoov - Construção Do Braço Esquerdo: Ricardo Ribeiro, Aline Fernanda Furtado SilvaDocumento3 páginasRobô Humanoide Inmoov - Construção Do Braço Esquerdo: Ricardo Ribeiro, Aline Fernanda Furtado SilvaJose AlfredoAinda não há avaliações
- Curso 240578 Aula 00 0d30 CompletoDocumento38 páginasCurso 240578 Aula 00 0d30 CompletoMarcos FAinda não há avaliações
- Visão Computacional e Reconhecimento de Comandos de Voz Aplicados Na Interação Com Jogos e Ambientes 3DDocumento4 páginasVisão Computacional e Reconhecimento de Comandos de Voz Aplicados Na Interação Com Jogos e Ambientes 3DNicole GuimaraesAinda não há avaliações
- Gasparino Mateus Valverde TCCDocumento64 páginasGasparino Mateus Valverde TCCjorge n m silvaAinda não há avaliações
- PrototipaçãoDocumento45 páginasPrototipaçãoAndreia Cristina Flores de MatosAinda não há avaliações
- cw1 Comp GraficaDocumento37 páginascw1 Comp GraficaMelina N CaxiasAinda não há avaliações
- 37 DT PaperDocumento7 páginas37 DT Paperlotar.shadow600Ainda não há avaliações
- Art TCC 051 2006Documento4 páginasArt TCC 051 2006Diego SilvaAinda não há avaliações
- Robôs Autônomos - VoittoDocumento20 páginasRobôs Autônomos - VoittoRobsonAinda não há avaliações
- Projeto Dança Com Robôs ModeloDocumento4 páginasProjeto Dança Com Robôs ModeloSuely SilvaAinda não há avaliações
- Desenvolvimento de Ambientes de Projeto de Engrenagens para Fins DidáticosDocumento8 páginasDesenvolvimento de Ambientes de Projeto de Engrenagens para Fins DidáticosRobsonstatisticsAinda não há avaliações
- Forum Engenharia de SoftwareDocumento7 páginasForum Engenharia de Softwarepyung yungAinda não há avaliações
- Mecatronica Facil Numero 38Documento35 páginasMecatronica Facil Numero 38Marcelo TeixeiraAinda não há avaliações
- Projeto de Produto Atv8docxDocumento3 páginasProjeto de Produto Atv8docxLuísa RorizAinda não há avaliações
- Introdução À Robótica e MecatrônicaDocumento297 páginasIntrodução À Robótica e Mecatrônicavitoriaelisa100% (1)
- Mecatronica Facil 38Documento35 páginasMecatronica Facil 38Deocleciano Araújo de OliveiraAinda não há avaliações
- A ROBÓTICA NA PRÁTICA - TRABALHO DE LP Rafael AvelinoDocumento4 páginasA ROBÓTICA NA PRÁTICA - TRABALHO DE LP Rafael AvelinoRafael AvelinoAinda não há avaliações
- Medição Inteligente de Distância de Objetos Estáticos para Robótica de EnxameDocumento15 páginasMedição Inteligente de Distância de Objetos Estáticos para Robótica de EnxameEDUARDO CESAR AMANCIOAinda não há avaliações
- Curso Programação Pitágoras - DF ProgramaçãoDocumento74 páginasCurso Programação Pitágoras - DF ProgramaçãoVinicius Sabrina Pedro100% (1)
- Desenvolvimento de Um Robô Omnidirecional para Participação em Competições de FutebolDocumento89 páginasDesenvolvimento de Um Robô Omnidirecional para Participação em Competições de Futebolhenrique.monteiroAinda não há avaliações
- TCCG - Engenharia Da Computação - Pedro Artur Ferreira Dos Santos Costa - 2019Documento85 páginasTCCG - Engenharia Da Computação - Pedro Artur Ferreira Dos Santos Costa - 2019damaris imuraAinda não há avaliações
- Representação Bidimensional de Elementos SólidosDocumento65 páginasRepresentação Bidimensional de Elementos SólidosFernando AugustoAinda não há avaliações
- Projeto Trainee CompDocumento6 páginasProjeto Trainee CompFelipe CostaAinda não há avaliações
- Diário de BordoDocumento1 páginaDiário de BordoMarcos LopesAinda não há avaliações
- 7º Ano - 1 Aula - Carro ProgramávelDocumento4 páginas7º Ano - 1 Aula - Carro ProgramávelGuddy00Ainda não há avaliações
- SimRobô Simulador para Robótica Com Propósito Educacional PDFDocumento9 páginasSimRobô Simulador para Robótica Com Propósito Educacional PDFcapacitor64Ainda não há avaliações
- Proposta de ArquiteturaDocumento180 páginasProposta de ArquiteturaAline GonçalvesAinda não há avaliações
- Nível 4Documento10 páginasNível 4Lucas GabrielAinda não há avaliações
- Relatório PAPDocumento8 páginasRelatório PAPbabamano490Ainda não há avaliações
- Inteligência Artifical NavegaçãoDocumento5 páginasInteligência Artifical NavegaçãoSergio RicardoAinda não há avaliações
- projetoECAI23 2021 01Documento3 páginasprojetoECAI23 2021 01Tatiane Martins BistulfiAinda não há avaliações
- Integração Entre Software DE Planejamento DE Tarefas DE Movimentação E O Robô Móvel RobotinoDocumento8 páginasIntegração Entre Software DE Planejamento DE Tarefas DE Movimentação E O Robô Móvel RobotinoRicardo GusmaoAinda não há avaliações
- Sistema Embarcado de Baixo Custo Utilizando o ESP-32 Na TelemedicinaDocumento11 páginasSistema Embarcado de Baixo Custo Utilizando o ESP-32 Na TelemedicinaYan CostaAinda não há avaliações
- Proposta Desenvolvimento PlataformaDocumento66 páginasProposta Desenvolvimento PlataformaYan CostaAinda não há avaliações
- TCC Versão Final Yanes Costa Nascimento CONSTRUÇÃO DE UMA IMPRESSORA 3D DE BAIXO CUSTO APLICADA À ROBÓTICADocumento82 páginasTCC Versão Final Yanes Costa Nascimento CONSTRUÇÃO DE UMA IMPRESSORA 3D DE BAIXO CUSTO APLICADA À ROBÓTICAYan CostaAinda não há avaliações
- Robótica Educacional No Ensiono de Alunos Do Ensino MédioDocumento11 páginasRobótica Educacional No Ensiono de Alunos Do Ensino MédioYan CostaAinda não há avaliações
- Explorando Redes Neurais de Grafos para Predição de Interações Mirna-Alvo Associadas A Câncer em Grafos HeterogêneosDocumento100 páginasExplorando Redes Neurais de Grafos para Predição de Interações Mirna-Alvo Associadas A Câncer em Grafos HeterogêneosYan CostaAinda não há avaliações
- Pereira 21Documento59 páginasPereira 21Yan CostaAinda não há avaliações
- 2011 BrunoRibeiroRaulino TCCDocumento152 páginas2011 BrunoRibeiroRaulino TCCYan CostaAinda não há avaliações
- Manual AiP 23 12 2019Documento68 páginasManual AiP 23 12 2019Yan CostaAinda não há avaliações
- Manual LCD GtmaxDocumento11 páginasManual LCD GtmaxYan CostaAinda não há avaliações
- 13604h GuiaGerenciamCabosDocumento172 páginas13604h GuiaGerenciamCabosmdscorreaAinda não há avaliações
- ES-S-401 Montagem Estrutura Metalica Rev 6Documento27 páginasES-S-401 Montagem Estrutura Metalica Rev 6Manoel CosmeAinda não há avaliações
- I Lista de ExerciciosDocumento2 páginasI Lista de ExerciciosVitor Hugo MelloAinda não há avaliações
- Notas Aula Radiologia IndustrialDocumento89 páginasNotas Aula Radiologia IndustrialJoao BatistaAinda não há avaliações
- 25a50 IOM SHW Springer Midea Inverter 256.08.757 B 11 16 ViewDocumento44 páginas25a50 IOM SHW Springer Midea Inverter 256.08.757 B 11 16 ViewGondranAinda não há avaliações
- Controle de ConcorrênciaDocumento5 páginasControle de ConcorrênciaReginaldo DinizAinda não há avaliações
- Apostila de Elementos de Maquinas - 2017.1Documento87 páginasApostila de Elementos de Maquinas - 2017.1spkperformanceAinda não há avaliações
- 01 GAMA, Ruy, A Tecnologia e o Trabalho Na HistóriaDocumento14 páginas01 GAMA, Ruy, A Tecnologia e o Trabalho Na HistóriavenisemeloAinda não há avaliações
- Conexoes Werk SchottDocumento12 páginasConexoes Werk SchottAlexandreAinda não há avaliações
- Efeito ChaminéDocumento4 páginasEfeito ChaminéTaísaCardosoAinda não há avaliações
- Tabelas Concretos e ArgamassasDocumento9 páginasTabelas Concretos e ArgamassasLayrone Tonon CorrêaAinda não há avaliações
- Código de Obras - Lei 84 de 1993 - Prefeitura Municipal de SantosDocumento36 páginasCódigo de Obras - Lei 84 de 1993 - Prefeitura Municipal de Santosmarcus_aureliusAinda não há avaliações
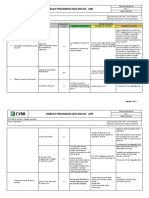
- Apr - Trabalho em AlturaDocumento5 páginasApr - Trabalho em AlturaJose Andre C NettoAinda não há avaliações
- Fundamentação Teórica (Convecção)Documento4 páginasFundamentação Teórica (Convecção)Myung Hee FigurAinda não há avaliações
- BDocumento71 páginasBkarentay56Ainda não há avaliações
- Catalogo EDFERDocumento36 páginasCatalogo EDFERCleiton BuzeliAinda não há avaliações
- Relatório - Trabalho Final - Ponte - Mecânica Dos Sólidos - Trim3.1Documento13 páginasRelatório - Trabalho Final - Ponte - Mecânica Dos Sólidos - Trim3.1Fernando Henrique G. Zucatelli100% (4)
- Trabalho 28112021Documento9 páginasTrabalho 28112021José AurelioAinda não há avaliações
- Abnt Associação Brasileira de Normas TécnicasDocumento2 páginasAbnt Associação Brasileira de Normas TécnicasRenato VazAinda não há avaliações
- 01-Central de Deteção-Teletek-Mag4p-CaracterísticasDocumento1 página01-Central de Deteção-Teletek-Mag4p-CaracterísticasGonçaloAinda não há avaliações
- Projeto de Banco de DadosDocumento92 páginasProjeto de Banco de DadosFabio OnizukaAinda não há avaliações
- Clear WaveDocumento110 páginasClear WaveMarcelo AzevedoAinda não há avaliações
- BR 15Documento8 páginasBR 15Everton AlvesAinda não há avaliações
- Ebook 64 Tipos de Simbologia Eletrica Usada em Projetos EletricosDocumento16 páginasEbook 64 Tipos de Simbologia Eletrica Usada em Projetos EletricosNilton RodriguesAinda não há avaliações
- Acionamentos HidráulicosDocumento33 páginasAcionamentos HidráulicosVinicius SessaAinda não há avaliações
- Apresent Grupo Paiva Engenharia LitoralDocumento11 páginasApresent Grupo Paiva Engenharia LitoralClayton LeiteAinda não há avaliações