Você também pode gostar
- IRC5 Manut Eletr Prev8Documento48 páginasIRC5 Manut Eletr Prev8fjpires_7012100% (1)
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocNo EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocAinda não há avaliações
- Manual Interface Placa Controladora CNC Mach3 5 Eixos Via Porta Paralela DB25 PinosDocumento21 páginasManual Interface Placa Controladora CNC Mach3 5 Eixos Via Porta Paralela DB25 PinosCarlos Eduardo75% (4)
- KT Flat 5 - 2Documento9 páginasKT Flat 5 - 2Fidu TicoAinda não há avaliações
- Manual Al 2000 VF v1.4 ReduzidaDocumento14 páginasManual Al 2000 VF v1.4 ReduzidaGelson Simões0% (1)
- QIROX-V06 - 2011D PortugueseDocumento234 páginasQIROX-V06 - 2011D PortuguesestorekeyAinda não há avaliações
- ROADMDocumento66 páginasROADMClaudiney BricksAinda não há avaliações
- Weg Cfw11 Kit KSDCDocumento1 páginaWeg Cfw11 Kit KSDCLuanAinda não há avaliações
- Esquema de Ligação - PCPTRF50 Ebyte 24VccDocumento6 páginasEsquema de Ligação - PCPTRF50 Ebyte 24VccFagner de Sousa NobreAinda não há avaliações
- Curso Instalação 8055 PowerDocumento29 páginasCurso Instalação 8055 PowerGuilherme MirandaAinda não há avaliações
- CGC 400 Data Sheet 4921240518 BRDocumento12 páginasCGC 400 Data Sheet 4921240518 BRJosé FerreiraAinda não há avaliações
- KTC Manual Xinje Instrução XP-18Documento40 páginasKTC Manual Xinje Instrução XP-18eversonsolomaoAinda não há avaliações
- Catálogo Neoyama Motion v03r01Documento6 páginasCatálogo Neoyama Motion v03r01Hercy JunioAinda não há avaliações
- Manual Placa Interface Controladora CNC 5 Eixos Mach3 R01Documento24 páginasManual Placa Interface Controladora CNC 5 Eixos Mach3 R01Carlos EduardoAinda não há avaliações
- Curso - Básico - OmniPCX EnterpriseDocumento196 páginasCurso - Básico - OmniPCX Enterprisedavisan55100% (3)
- Multec 700Documento12 páginasMultec 700Gerson PlovasAinda não há avaliações
- Controlador CPWS42 64K 4DO4DI2COM Cel Carga 5BOT V1 PDFDocumento20 páginasControlador CPWS42 64K 4DO4DI2COM Cel Carga 5BOT V1 PDFAway ForeverAinda não há avaliações
- Catalogo Servomotores WegDocumento20 páginasCatalogo Servomotores WegventooesteAinda não há avaliações
- PROAUTO APT - Equip. - Automacao - 2021Documento6 páginasPROAUTO APT - Equip. - Automacao - 2021Karen PaolaAinda não há avaliações
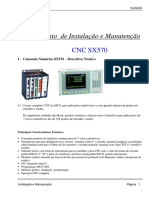
- Man Instsx570Documento47 páginasMan Instsx570Antonio LucasAinda não há avaliações
- 18 Multec 700 PDFDocumento12 páginas18 Multec 700 PDFjonatan arango100% (3)
- 18 Multec 700Documento12 páginas18 Multec 700marcos67% (3)
- TIA PRO1 02 Introdução Ao TIA PORTAL BRADocumento41 páginasTIA PRO1 02 Introdução Ao TIA PORTAL BRAEduardoAinda não há avaliações
- CLP de Seguranca PSC BR 10100Documento2 páginasCLP de Seguranca PSC BR 10100diegods87Ainda não há avaliações
- A Sinamics 03 18Documento56 páginasA Sinamics 03 18Alberto EmotoAinda não há avaliações
- Modulo IIIDocumento69 páginasModulo IIIGilson Scheibe100% (1)
- Apostila Treinamento Comandos Infolev r06 PDFDocumento49 páginasApostila Treinamento Comandos Infolev r06 PDFaldjan_557541154100% (2)
- 1) PTN 950&910 Hardware Description (Espanhol)Documento37 páginas1) PTN 950&910 Hardware Description (Espanhol)Claudio SaezAinda não há avaliações
- Manual SMC-U XYZ V3.00Documento18 páginasManual SMC-U XYZ V3.00Rafael De SouzaAinda não há avaliações
- Mapa de Memória CPWS13Documento11 páginasMapa de Memória CPWS13mgfnetoAinda não há avaliações
- X6330-1 - Conector Vermelho ControladorDocumento4 páginasX6330-1 - Conector Vermelho Controladormario alicioAinda não há avaliações
- T60manpt-X2 T60 Instruction Manual For 6.0x Product Version (Português) (Rev. X2)Documento722 páginasT60manpt-X2 T60 Instruction Manual For 6.0x Product Version (Português) (Rev. X2)Moacir CarvalhoAinda não há avaliações
- Esquema Reparação Modulo RochesterDocumento12 páginasEsquema Reparação Modulo RochesterCarlos Eduardo100% (1)
- SL 1000 Manual Instalaçâo ResumoDocumento82 páginasSL 1000 Manual Instalaçâo ResumoRenan RomeuAinda não há avaliações
- CFW11 Safe Stop SIL Standards and InformationDocumento36 páginasCFW11 Safe Stop SIL Standards and InformationLuanAinda não há avaliações
- TMA - PC.R1 - Placa Controladora CNC para 5 Eixos: Rev.01 1. CaracterísticasDocumento3 páginasTMA - PC.R1 - Placa Controladora CNC para 5 Eixos: Rev.01 1. CaracterísticasRonaldo SilvaAinda não há avaliações
- SYC Catalogo Abril 2010Documento106 páginasSYC Catalogo Abril 2010AsadAinda não há avaliações
- Servodrive IspDocumento28 páginasServodrive IspDhp CiaAinda não há avaliações
- Treinamento Pos Vendas Fiat Stilo TRANSPARENCIAS - 192Documento244 páginasTreinamento Pos Vendas Fiat Stilo TRANSPARENCIAS - 192A'Laj Costa100% (2)
- TCP - UDP PortUsage - November 3 2021Documento20 páginasTCP - UDP PortUsage - November 3 2021Edwin PariAinda não há avaliações
- Manual - ReservatórioDocumento10 páginasManual - ReservatóriogustavoAinda não há avaliações
- STD A1 OverviewDocumento58 páginasSTD A1 OverviewReggie HarvirAinda não há avaliações
- Multi - k05Documento47 páginasMulti - k05Rogério DornelAinda não há avaliações
- 2 Manual CLP Pic40 v3Documento14 páginas2 Manual CLP Pic40 v3filipegomessilvaAinda não há avaliações
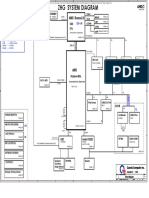
- Acer Aspire V5-121 - Da0zhgmb6d0 Rev DDocumento28 páginasAcer Aspire V5-121 - Da0zhgmb6d0 Rev Ddigantamilon75% (4)
- Manual Addtech MC16 PDFDocumento62 páginasManual Addtech MC16 PDFCaroline CoelherAinda não há avaliações
- Relatorio - Cablagem Estruturada - José - MagalhãesDocumento26 páginasRelatorio - Cablagem Estruturada - José - MagalhãesPedro MagalhãesAinda não há avaliações
- IRC5 Prog - BasDocumento68 páginasIRC5 Prog - BasccortesvAinda não há avaliações
- Manual Simumeril 840dDocumento2 páginasManual Simumeril 840dsolincolnAinda não há avaliações
- Al-2004 CpuDocumento10 páginasAl-2004 CpuChristian VieiraAinda não há avaliações
- Apostila Compact 60E1Documento8 páginasApostila Compact 60E1Péricles SilvaAinda não há avaliações
- GP3101D0 Manual de Operação Rev7Documento74 páginasGP3101D0 Manual de Operação Rev7Márcio JuniorAinda não há avaliações
- Instalação e Manutenção - SX570Documento66 páginasInstalação e Manutenção - SX570Thiago Teixeira Pires100% (1)
- Datasheet Cpu 44440 SegDocumento19 páginasDatasheet Cpu 44440 SegLeonardo Reis CortesAinda não há avaliações
- Diagrama Conector - B Da Unidade Lógica - LuDocumento1 páginaDiagrama Conector - B Da Unidade Lógica - LuWilson Bueno100% (5)
- Manual DG1000Documento8 páginasManual DG1000tecnicobalancascianorteAinda não há avaliações
- 04 - Telemetria Catálogo - Flex - A4 - PortuguêsDocumento2 páginas04 - Telemetria Catálogo - Flex - A4 - PortuguêsAna Paula PinheiroAinda não há avaliações
- PCP-39 MergedDocumento6 páginasPCP-39 MergedsantoscyberxAinda não há avaliações
- Cyansmart en PTDocumento79 páginasCyansmart en PTTamba MiguesnaAinda não há avaliações
- Manual para ELN - C F CDocumento9 páginasManual para ELN - C F CMauro Lúcio SilvaAinda não há avaliações
- UFCD9876-S4 (1) - Introdução Às Redes de ComunicaçõesDocumento17 páginasUFCD9876-S4 (1) - Introdução Às Redes de Comunicaçõescarinalima98Ainda não há avaliações
- Catalogo FBB - 2023Documento36 páginasCatalogo FBB - 2023Bruno MoreiraAinda não há avaliações
- Manual de Configuração Dos Micro Inversores DEYEDocumento6 páginasManual de Configuração Dos Micro Inversores DEYERenata LimaAinda não há avaliações
- HomeDocumento8 páginasHomeLucas MottinAinda não há avaliações
- Boleto Entrada Parcelamento Will 07-2023Documento2 páginasBoleto Entrada Parcelamento Will 07-2023Italo RodriguesAinda não há avaliações
- Parâmetros - Lista de RegistrosDocumento29 páginasParâmetros - Lista de RegistrosLigia NettoAinda não há avaliações
- Manual Quinta Roda - JostDocumento37 páginasManual Quinta Roda - JostThiago CaciqueAinda não há avaliações
- Prova A06 Tipo 001Documento19 páginasProva A06 Tipo 001LeiltonAinda não há avaliações
- BoletoDocumento1 páginaBoletoRaimundo MenesesAinda não há avaliações
- Como Ativar Um Dispositivo Hikvision PDFDocumento14 páginasComo Ativar Um Dispositivo Hikvision PDFIgor BaleraAinda não há avaliações
- Coletânea de Normas DNER E DNITDocumento7 páginasColetânea de Normas DNER E DNITthaisAinda não há avaliações
- 5 Reconhecimento FacialDocumento5 páginas5 Reconhecimento FacialYasmin BritoAinda não há avaliações
- Gabarito PedagogoDocumento16 páginasGabarito PedagogoDeuvaneOcanhaAinda não há avaliações
- Tecnologia e EsporteDocumento4 páginasTecnologia e EsporteValdirene xavier rodriguesAinda não há avaliações
- Banca FCCDocumento115 páginasBanca FCCJosias RibeiroAinda não há avaliações
- Passo A Passo Alvará Online DCDocumento2 páginasPasso A Passo Alvará Online DCJonas AraujoAinda não há avaliações
- Sua Obra A Energia Da: Catálogo de ProdutosDocumento31 páginasSua Obra A Energia Da: Catálogo de Produtosjdlucas39 lucasAinda não há avaliações
- A Importancia Do Treinamento e Desenvolvimento para o Crescimento ProfissionalDocumento7 páginasA Importancia Do Treinamento e Desenvolvimento para o Crescimento ProfissionalEdgard NetoAinda não há avaliações
- Tarefa 1Documento7 páginasTarefa 1Marcelo OliveiraAinda não há avaliações
- Guia de Instalação ShineWiFi-XDocumento2 páginasGuia de Instalação ShineWiFi-XEvandro Assunção0% (1)
- OculosDocumento11 páginasOculosTushiAinda não há avaliações
- Plano de Ensino Seminarios em Computacao - DCOMP/UFSDocumento7 páginasPlano de Ensino Seminarios em Computacao - DCOMP/UFSRogério Patrício Chagas Do NascimentoAinda não há avaliações
- BoletoDocumento1 páginaBoletoTiago MonteiroAinda não há avaliações
- Módulo I2cDocumento7 páginasMódulo I2cIgor BarbosaAinda não há avaliações
- Entrega Tecnica Mini Grua UpDocumento4 páginasEntrega Tecnica Mini Grua UpGuilherme Leopoldo100% (1)
- Revisão 7 Ano Máquinas TérmicasDocumento2 páginasRevisão 7 Ano Máquinas TérmicasThabatta Mattos93% (14)
- Lista de Todos Os Comandos Do CMD e WindowsDocumento10 páginasLista de Todos Os Comandos Do CMD e WindowsAderito Macuacua100% (1)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- Tudo Sobre A Tecnologia Blockchain: O Guia Mais Completo Para Iniciantes Sobre Carteira Blockchain, Bitcoin, Ethereum, Ripple, DashNo EverandTudo Sobre A Tecnologia Blockchain: O Guia Mais Completo Para Iniciantes Sobre Carteira Blockchain, Bitcoin, Ethereum, Ripple, DashAinda não há avaliações
- Modelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisNo EverandModelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisAinda não há avaliações
- Comandos ElétricosNo EverandComandos ElétricosAinda não há avaliações
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Caixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasNo EverandCaixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasAinda não há avaliações
- Trincas e Fissuras em Edificações: causadas por recalques diferenciaisNo EverandTrincas e Fissuras em Edificações: causadas por recalques diferenciaisAinda não há avaliações
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Blockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesNo EverandBlockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesAinda não há avaliações
- HACKED: O Livro Guia Definitivo De Linux Kali E Hacking Sem Fio Com Ferramentas De Testes De Segurança E DeNo EverandHACKED: O Livro Guia Definitivo De Linux Kali E Hacking Sem Fio Com Ferramentas De Testes De Segurança E DeAinda não há avaliações
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Roadmap back-end: Conhecendo o protocolo HTTP e arquiteturas RESTNo EverandRoadmap back-end: Conhecendo o protocolo HTTP e arquiteturas RESTNota: 4.5 de 5 estrelas4.5/5 (2)
- Nr-12 - Segurança No Trabalho Em Máquinas E EquipamentosNo EverandNr-12 - Segurança No Trabalho Em Máquinas E EquipamentosAinda não há avaliações
- Gestão de Projetos e Lean Construction:: Uma Abordagem Prática e IntegradaNo EverandGestão de Projetos e Lean Construction:: Uma Abordagem Prática e IntegradaNota: 5 de 5 estrelas5/5 (2)
- Orientação a Objetos: Aprenda seus conceitos e suas aplicabilidades de forma efetivaNo EverandOrientação a Objetos: Aprenda seus conceitos e suas aplicabilidades de forma efetivaNota: 5 de 5 estrelas5/5 (3)
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Business Intelligence: Implementar do jeito certo e a custo zeroNo EverandBusiness Intelligence: Implementar do jeito certo e a custo zeroNota: 4.5 de 5 estrelas4.5/5 (4)